分拣机L型摆臂的静动态特性分析及结构优化
2022-08-23孟新宇
陈 磊,孟新宇
(沈阳工业大学 机械工程学院,辽宁 沈阳 110000)
0 引言
摆臂是分拣机中核心机构的关键功能部件之一,工作时摆臂带动吸嘴来完成芯片的分拣。由于分拣机的运行速度很高,所以要求摆臂的静动态特性必须足够才能实现芯片的分拣精度和分拣效率[1],因此,要求摆臂具有足够的刚度和强度。根据实际工程背景,某芯片分拣机摆臂采用L型摆臂,目前很少有文献对类似于L型悬臂梁的摆臂进行研究。为了提高芯片分拣机的分拣精度,本文使用ANSYS Workbench软件对L型摆臂进行瞬态动力学分析以及分选位置的静动态特性分析,并根据静动态特性分析结果,以减轻摆臂质量并提高摆臂的静刚度为目标,对摆臂进行结构优化研究。
1 分拣机构摆臂有限元分析
1.1 分拣机摆臂有限元模型的建立
L型摆臂材料为7075铝合金[2],其密度为2 810 kg/m3、弹性模量为72 GPa、泊松比为0.33,经计算摆臂的质量为80 g。将L型摆臂模型导入到有限元分析软件ANSYS Workbench中[3],为模拟真实的工作情况,在安装吸嘴孔下沿建立质量点来模拟吸嘴重量,大小为10 g。在ANSYS Workbench中,选择使用计算速度快且能保证精度的四面体网格对摆臂进行网格划分,网格划分结果如图1所示。得到的网格单元数为117 738、节点数为176 573。
1.2 摆臂瞬态动力学分析
摆臂通过4个螺栓连接在直线电机带动的滑块上,假设摆臂摆动和滑块滑动的运动规律保持一致[4]。直线电机的驱动力为283 N,假设电机先以恒定的驱动力加速,然后瞬间制动,其速度-时间关系如图2所示。图2中,t0为电机匀加速时间,t0=0.1 s;vmax为最大速度,约为7 m/s;t1为匀减速时间,t1=0.02 s。
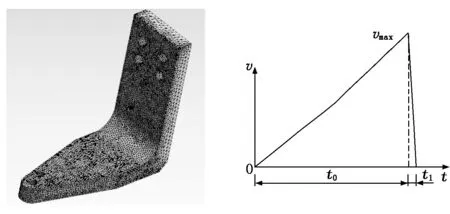
图1 摆臂有限元模型网格划分 图2 电机的速度-时间关系
在ANSYS中约束摆臂的4个螺栓孔,施加上述载荷,得到吸嘴处(摆臂末端)的位移响应曲线,如图3所示。
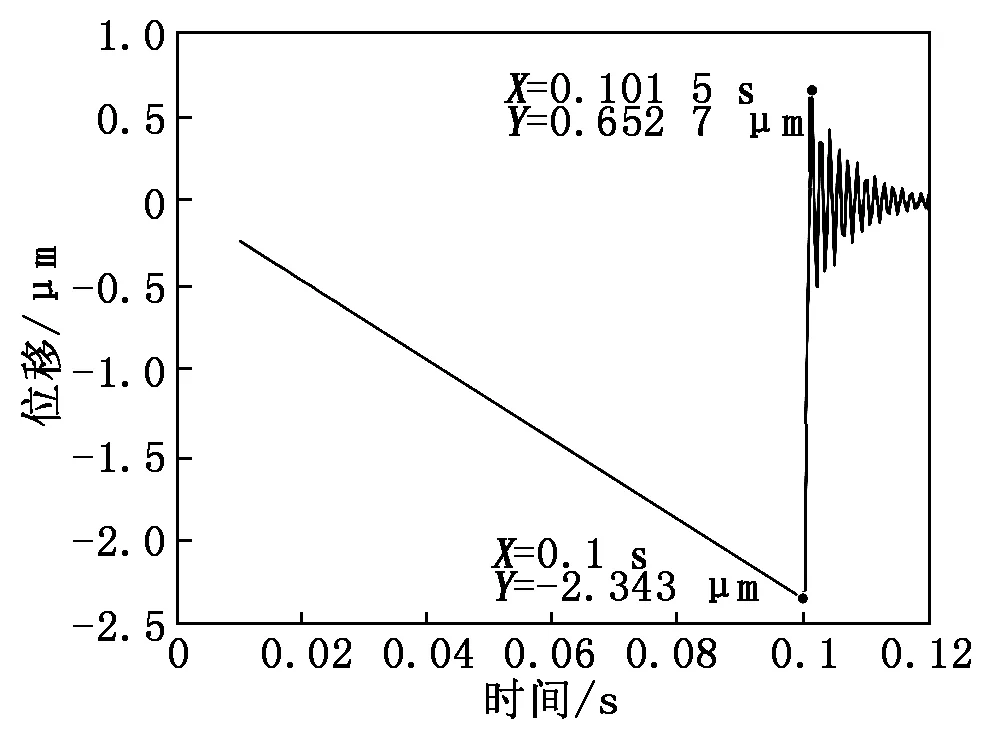
图3 摆臂末端的位移响应曲线
由图3可以看出:摆臂在加载过程中的最大位移为2.3 μm左右,加载结束后摆臂的末端仍在振动,且最大振幅为1.3 μm左右,说明摆臂的刚度不足,需要对其优化,使其吸嘴处的振幅满足工作要求的振幅低于0.8 μm。
1.3 摆臂静力学分析
在ANSYS Workbench中约束摆臂的4个螺栓孔,将直线电机制动后的加速度(即瞬态动力学分析得到的加速度,约为4 m/s2)施加到摆臂质心,得到摆臂的总体变形云图和等效应力云图,如图4和图5所示。
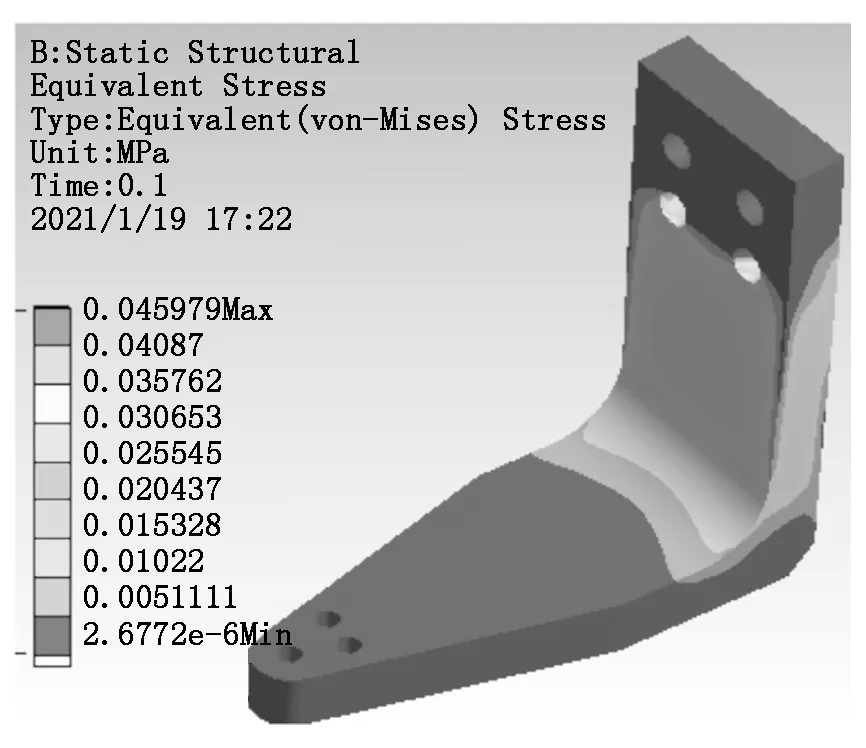
图5 摆臂等效应力云图
由图4可知:分拣机摆臂的最大变形为0.152 49 μm,发生在摆臂的头部,且安装吸嘴处的变形最大。由图5可知:摆臂的最大等效应力为0.045 979 MPa,且摆臂大部分区域的等效应力都比较小,说明摆臂有很大的优化空间。
1.4 摆臂模态分析
模态分析不受载荷的影响,故只需约束4个螺栓孔,得到的摆臂前4阶模态振型结果如表1所示。

表1 摆臂前4阶模态振型结果
由模态分析结果可知,摆臂的前3阶振型主要表现为摆臂横梁部分的摆动,变形最大处发生在摆臂安装吸嘴的位置,而摆臂的第2阶摆动方向和摆臂工作时的移动方向一致,所以要特别关注摆臂的2阶固有频率和振型。分拣机实际工作时,工作频率大致为10 Hz~20 Hz,远远小于摆臂的1阶固有频率,说明摆臂的动态特性很好,有很大的优化空间。
2 分拣机摆臂的结构优化及优化结果
2.1 摆臂的结构优化
为提高摆臂的刚度,采用ANSYS Workbench中的拓扑优化模块对摆臂的形状进行优化。以摆臂刚度最大化为优化目标,保留质量为50%作为约束条件对摆臂进行优化。将静态特性分析的求解数据共享到拓扑优化模块中,设置优化目标和约束条件后进行求解,结果如图6所示。
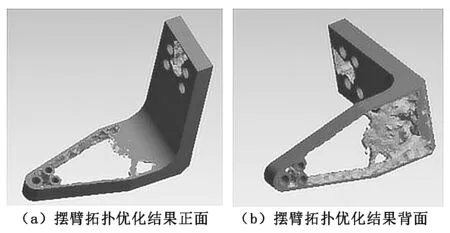
图6 以刚度最大化为目标的拓扑优化结果
拓扑优化后的形状很不规则,考虑到吸嘴和各种传感器的安装,先大概建立摆臂的模型,接下来对摆臂进行尺寸优化,以确定合理的尺寸,通过灵敏度分析确定对摆臂静刚度和固有频率影响较大的尺寸,如图7所示。
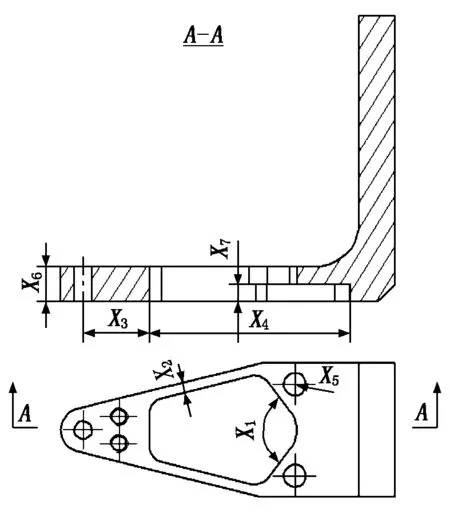
图7 摆臂结构及设计参数
2.2 摆臂优化结果
使用优化设计模块对拓扑优化后的摆臂进行静刚度优化,以静力学分析和模态分析为基础,将静力学分析结果中的最大变形、最大应力和模态分析结果中的1阶固有频率设置为参数并进行约束。具体约束条件如下:①使摆臂的最大应力值小于铝合金的材料许用应力;②优化后摆臂最大变形量小于工作允许的最大变形量;③把通过灵敏度分析得到的对摆臂参数影响较大的尺寸限制在合理范围内。
在ANSYS中设置完毕求解得到三组候选点,对比三组候选点,选择较优的一组候选点作为结果。为便于加工,将所得数据圆整后重新建模进行分析,静态分析得到的摆臂结构优化前、后的结果如表2所示,瞬态动力学分析得到的摆臂末端位移响应如图8所示。
由表2可知:优化后的摆臂1阶固有频率较优化前增加了65.62 Hz,质量减少了26%,摆臂吸嘴处的最大变形减少了38.9%,应力减少了39%,静刚度得到了提高。
对比图3与图8可知:摆臂在加载过程中吸嘴处的最大变形降低了39%左右,振动幅值降低了51%左右,而且在等待时间内,末端吸嘴处的振动在规定时间基本降为0,摆臂末端的振动不可避免,但达到了工作允许的振动范围内,这种优化结果可以接受。
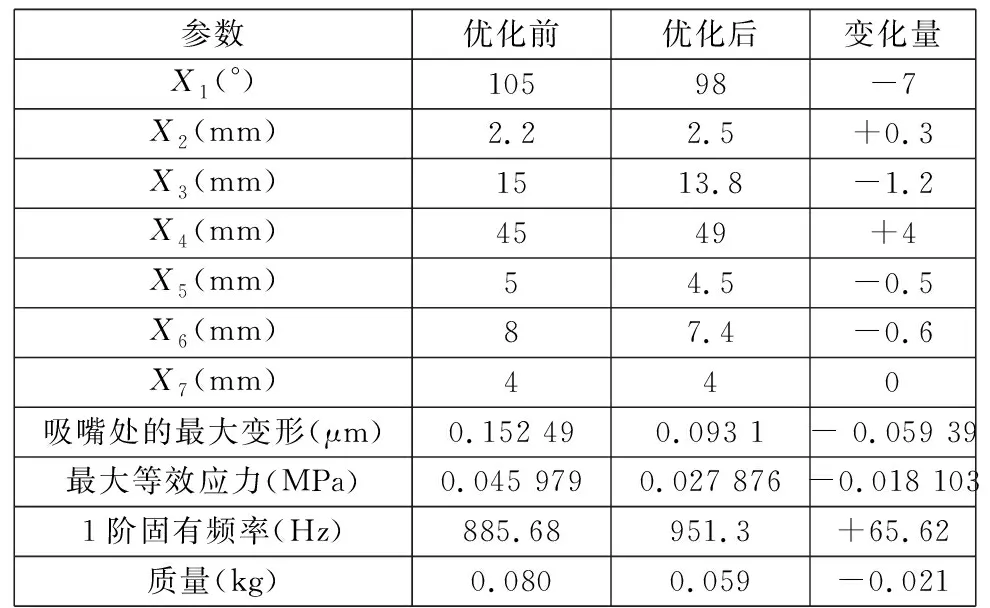
表2 静态分析得到的摆臂结构优化前、后的结果
3 结论
在典型工况下,对某型号的芯片分拣机摆臂进行瞬态动力学分析和静动态特性分析,得到了摆臂末端的位移响应以及静动态特性,为摆臂优化提供依据。采用ANSYS Workbench中的优化模块对L型摆臂进行结构优化,并结合实际的工作情况对摆臂进行改进。改进后摆臂的质量减少26%,而摆臂的静刚度增加了38.9%,应力减少了39%,达到了优化设计的目的,可以为其他L型摆臂的优化分析提供参考。
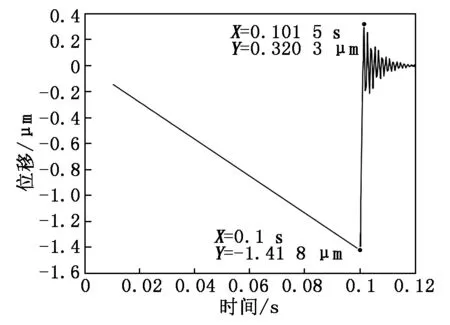
图8 优化后摆臂末端的位移响应曲线
