基于并行测试技术的地面测控系统自检方法
2021-11-17梁海波董世茂
梁海波 姜 苹 王 尚 李 浩 董世茂 李 岩
1.北京航天自动控制研究所,北京 100854 2.宇航智能控制技术国家级重点实验室,北京 100854
0 引言
随着空基导弹武器在实战中的需求日益多样化,导弹武器的类型、型号越来越多。为了确保空基导弹武器持续的战斗力,地面测控系统已成为导弹系统开发方和用户对其进行测试、维护的主要工具。在此背景下,用户对快速测试的需求越来越强烈,对地面测控系统的设计及测试方法也提出了更高的要求[1-2]。
目前,作为地面测控系统快速测试技术研究的重要分支,地面测控系统的自检测试多采用接口等效器法,即设计一个能够模拟导弹飞行控制系统电气接口特性的等效器,使用该等效器配合地面测控系统执行流程测试,实现对地面测控系统接口的全面自检。文献[3]提及了一种基于上、下位机的等效器设计方案:下位机采用实时操作系统,或高性能的嵌入式设备完成采样及指令输出,以满足实时性要求;上位机采用商用操作系统,完成测试流程的选择与启停控制、数据显示、存储、检索等功能。文献[4]实现了一体化等效器设计方案,利用嵌入式计算机及配套软件执行较为复杂的测试流程,以期获得全面的测试结果。上述文献中的设计方案均能够满足地面测控系统的接口测试需求,但测试过程往往基于流程化的串行测试技术,测试耗时相对较长。
因此,为了提高地面测控系统自检测试的效率,同时进一步挖掘现有地面测控系统设备的潜力,本文不再设计独立的接口等效器,而是将系统中已有的故障诊断计算机进行功能复用。利用自检回环测试电缆,将所有接口信号引入故障诊断计算机中,在对被测信号进行整理、归类的基础上,有针对性地设计相应的自检测试方法,并将并行测试技术引入自检测试软件的设计过程中,开展并行测试流程设计,达到缩短测试时间、实现地面测控系统高效自检测试的目的。
1 总体方案
地面测控系统的组成及自检原理框图如图1所示。地面测控系统由中心控制计算机、故障诊断计算机,以太网交换机、30V直流电源、160V直流电源(相同技术状态,共4台)、以及信号转接棘爪电缆组成。地面测控系统各设备均通过以太网交换机实现互联互通。中心控制计算机作为地面测控系统的指令控制中心,通过以太网向地面测控系统内各设备发送控制指令,通过1553B总线向飞行控制系统发送控制指令,并向飞行控制系统发出时间同步脉冲信号、以及有源和无源开关量信号。故障诊断计算机将来自飞行控制系统及地面测控系统的信息进行汇总、分析、诊断,并出具测试报告。30V直流电源对外提供3路独立的直流供电输出,其中,1路为中心控制计算机输出的有源开关量供电,其余2路为飞行控制系统供电。4台160V直流电源为飞行控制系统供电。

图1 地面测控系统组成及自检原理框图
在对地面测控系统实施自检测试时,将故障诊断计算机的功能进行复用,作为地面测控系统自检的核心设备,模拟飞行控制系统,测试、判读来自地面测控系统的所有接口信号。
对地面测控系统与飞行控制系统之间的接口信号进行梳理、分类,划分为开关量信号、直流供电信号、时间同步脉冲信号、1553B总线共4类,详见表1所示。利用专门设计的信号转接棘爪电缆,将被测信号汇集、回环连接至故障诊断计算机中,再由故障诊断计算机利用自身的板卡资源测试表1中所有的接口信号。具体测试方案如下:

表1 自检接口信号汇总表
1)对于开关量信号,采用故障诊断计算机内部的开关量输入/输出板,对开关量的接通/断开状态进行测试;
2)对于直流供电信号,利用故障诊断计算机内部的模拟量采集电路实施电压采样,并判读电压值;
3)对于时间同步脉冲信号,通过故障诊断计算机内部的RS422接口板卡测试脉冲宽度、占空比等信息;
4)对于1553B总线,故障诊断计算机将自身总线站点初始化为RT,模拟飞行控制系统,完成与中心控制计算机BC的总线数据交互,实现总线通路检查。
将上述4类信号设计为4个测试项目,基于并行测试技术合理编排测试流程,实现地面测控系统的快速自检。
下面,将按照接口信号的不同类型,有针对性地开展自检测试方法设计。
2 自检方法设计
2.1 开关量信号自检
地面测控系统对外接口开关量信号包括联锁1、联锁2及允许投放,其中,联锁1和联锁2为无源开关量信号,允许投放为有源开关量信号。上述3个开关量信号均由中心控制计算机内部的开关量输出板、开关量输入板进行输出控制或读取。具体自检方法设计如下:
(1)联锁1
联锁1信号用来表征地面测控系统与飞行控制系统之间电连接器的连接状态,为地面测控系统一侧短接的无源开关量信号,由中心控制计算机内部开关量输出板的电磁继电器常闭触点实现。当中心控制计算机对联锁1继电器施加控制信号时,其触点由闭合状态转为断开状态,表示地面测控系统与飞行控制系统之间的电连接器已断开。在飞行控制系统一侧,可通过辅助电源及光耦电路读取联锁1信号电平的变化,获取两个系统之间电连接器的连接/断开状态。
故障诊断计算机模拟飞行控制系统,利用自身的开关量输入板检查来自中心控制计算机的联锁1信号,电路连接关系如图2所示。具体测试步骤如下:
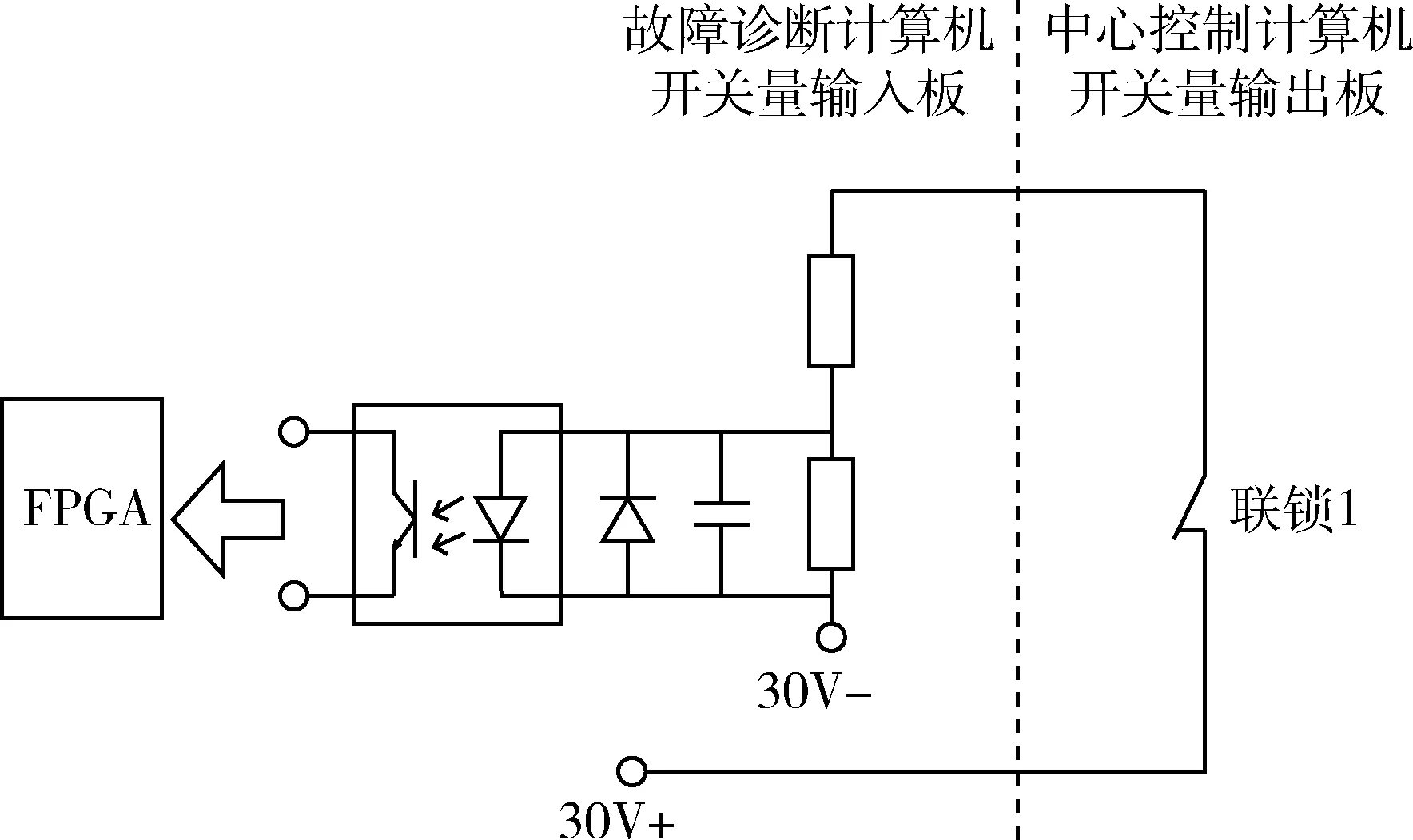
图2 联锁1信号自检电路示意图
1)故障诊断计算机采集联锁1触点闭合的状态,此时读取结果应为高电平;
2)测试结果合格后,由中心控制计算机控制断开联锁1继电器的触点,故障诊断计算机再次采集该触点的状态,此时读取结果应为低电平;
3)测试结果合格后,由中心控制计算机控制接通联锁1继电器的触点,将触点恢复到初始状态。
如果以上3个测试步骤能够顺利通过,则表明联锁1开关量工作正常。
(2)联锁2
联锁2信号与联锁1信号功能相同,均用来表征地面测控系统与飞行控制系统之间电连接器的连接状态。不同的是联锁2信号为飞行控制系统一侧短接。地面测控系统中心控制计算机通过辅助电源及光耦电路读取联锁2信号电平的变化,可获取两个系统之间的电连接器连接或断开状态。
这里,采用故障诊断计算机来模拟飞行控制系统实现联锁2信号的短接状态,具体可有2种实现方法:1)在两个系统互联的电连接器上,利用跨线将飞行控制系统一侧的联锁2信号直接短接;2)利用故障诊断计算机开关量输出板上继电器的常闭触点实现信号短接。分析发现,如果采用第1种方法,每当对联锁2信号进行测试时,需要试验人员手动断开两个系统之间的电连接器,测试结束后还需要将其重新连接好,降低了测试效率,有悖于实现快速自检测试的初衷。因此,采用第2种方法,即由故障诊断计算机开关量输出板的继电器常闭触点实现该联锁2的短接状态,具体电路连接关系如图3所示。

图3 联锁2信号自检电路示意图
联锁2开关量的测试方法与联锁1相同,仅需将联锁1测试方法中的故障诊断计算机与中心控制计算机的角色进行互换,此处不再赘述。
(3)允许投放
允许投放信号为有源开关量信号,通过中心控制计算机开关量输出板的继电器触点实现,电源供电由30V直流电源提供。当触点由断开转为闭合时,发出30V允许投放信号。
故障诊断计算机模拟飞行控制系统的接收电路,通过开关量输入板的光耦接收电路,即可实现对允许投放信号的读取,具体电路连接关系如图4所示。
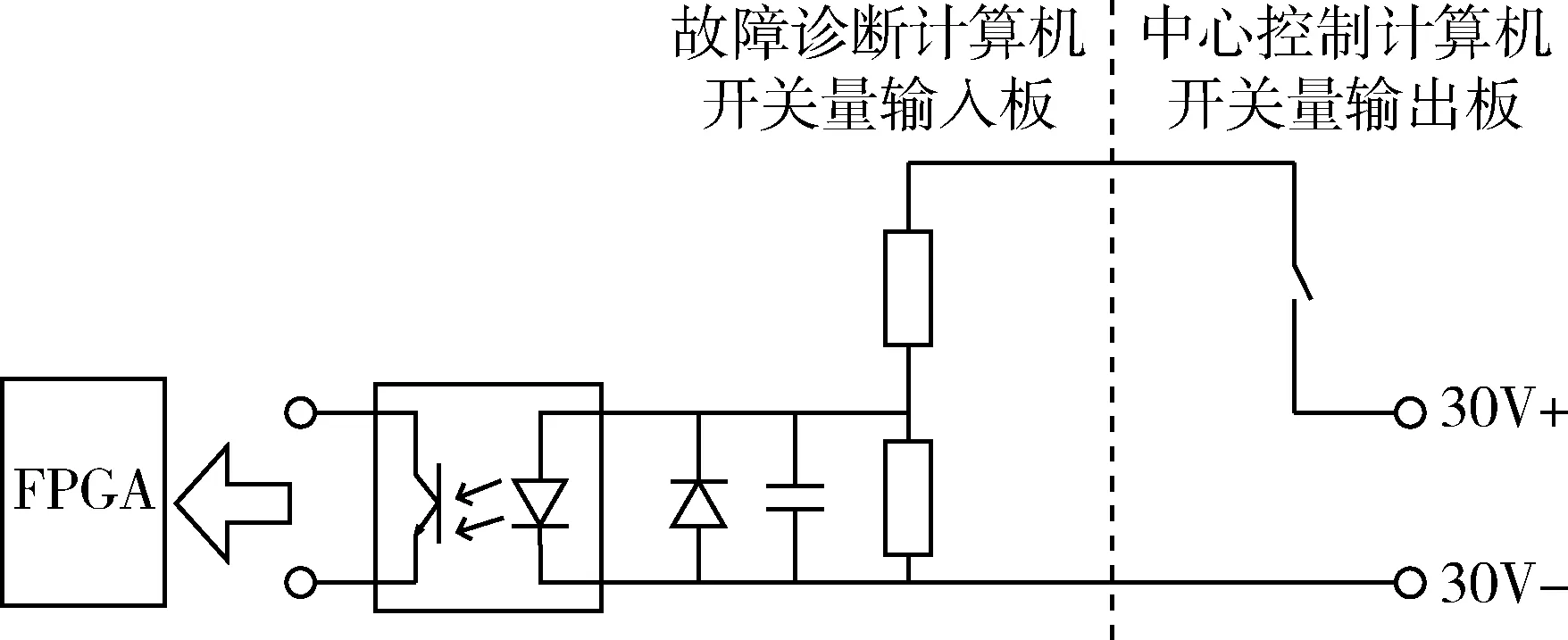
图4 允许投放信号自检电路示意图
允许投放信号的测试依然按照触点断开、触点闭合2个状态进行测试,测试方法与联锁1和联锁2类似。
2.2 电源供电输出自检
由图1和表1可知,地面测控系统需要进行测试的供电输出信号共6路:包括30V直流供电输出2路、160V直流供电输出4路,分别来自30V直流电源和4台160V直流电源。利用AD模拟量采样的方法,对6路被测信号进行电压测试,判断其电压值是否合格。
按照如图5所示电路,实现故障诊断计算机与被测信号之间的连接。针对单路信号的采样:首先,利用继电器切换选通及信号调理电路,使6路信号中的1路进入AD采样通道;然后,依次经过电压跟随、AD采样、隔离等环节后,进入FPGA;最后,由FPGA软件对电压信号连续采样6次,去掉其中的最大值和最小值,以余下4次采样值的均值作为本路采样的最终结果。

图5 电源供电输出信号自检示意图
为采样测试全部6路直流供电信号,设计8个流程步,按照1~8的顺序依次进行,详见表2所示。在每个测试流程步中,均对6路信号进行采样,其中,流程2~6均只接通1路被测信号。比对采样值与判据,如果结果在判据范围内,表明测试通过。

表2 模拟量采集流程分布表
经过8个流程步,除了能够完成对6路信号的测试,也最大程度地规避了6路被测信号中部分信号发生粘连的情况,提高了测试分辨率。
2.3 时间同步脉冲信号自检
地面测控系统中心控制计算机向飞行控制系统发送时间同步脉冲信号,该信号采用RS422差分电平标准,脉冲周期为1s,占空比为1/1000。
在对时间同步脉冲进行测试时,通过信号转接棘爪电缆,将该信号引入故障诊断计算机的RS422测试接口板上,如图6所示。由中心控制计算机发送若干连续的时间同步脉冲,故障诊断计算机对该脉冲串进行读取,识别出脉冲个数、单脉冲的周期和占空比,作为测试结果。如果测试结果与实际发送值一致,表明测试通过。

图6 时间同步脉冲信号自检示意图
2.4 1553B总线自检
地面测控系统与飞行控制系统之间采用1553B总线进行通信,主干总线位于地面测控系统中,中心控制计算机作为总线BC,飞行控制系统作为总线RT,均以“子线+耦合变压器”的方式挂接在主干总线上。
故障诊断计算机模拟飞行控制系统RT,利用信号转接棘爪电缆中的1553B子线,连接至地面测控系统的主干总线上,连接关系如图7所示。
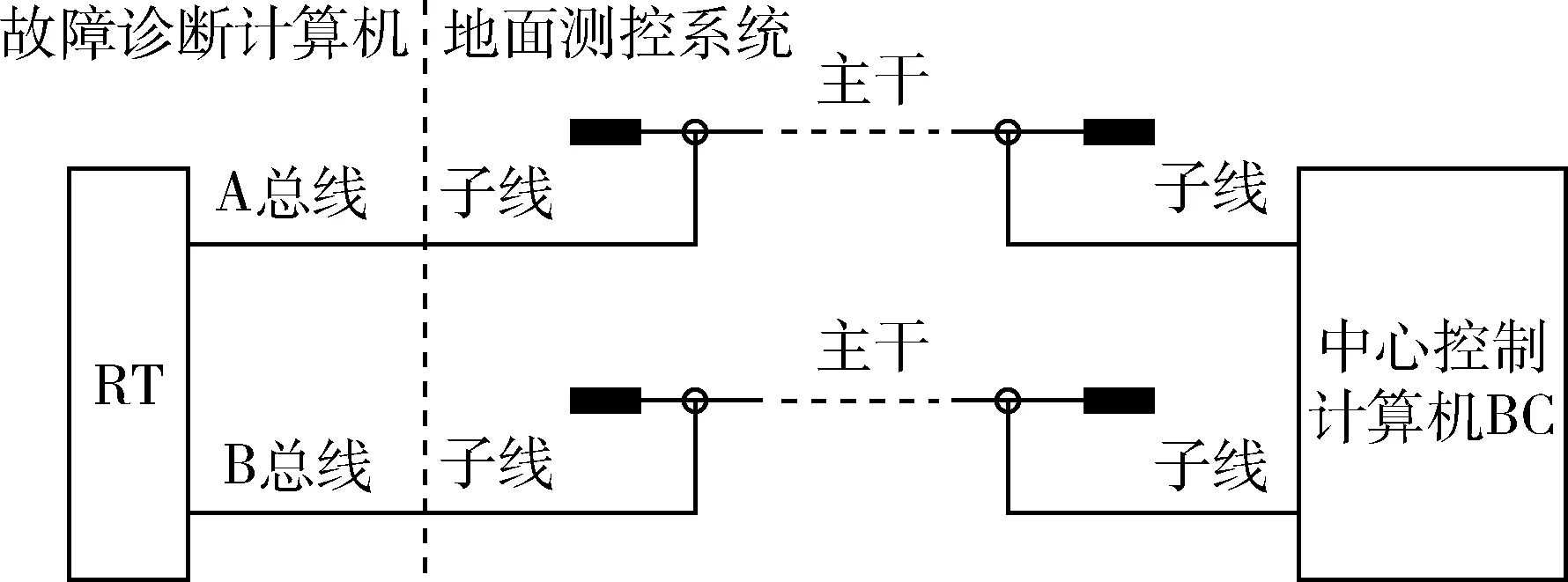
图7 1553B总线自检连接关系示意图
1553B总线测试时,采用对A总线和B总线依次进行数据通信测试的方法。首先,中心控制计算机作为BC,通过A总线向故障诊断计算机RT连续发送若干包测试数据,故障诊断计算机将接收到的数据逐包与发送数据进行比对,如果一致,则A总线测试通过。然后,中心控制计算机与故障诊断计算机之间采用同样的方法,完成B总线的数据通信测试。如果A总线和B总线测试均正常,则表明1553B总线通路测试通过。
3 自检测试软件实现
3.1 并行测试技术
并行测试技术是将并行处理技术引入自动测试领域后形成的一种先进测试技术,旨在提高测试效率,这一技术也被美国NxTest体系确定为下一代关键技术[5-6]。
综合考虑并行测试技术的应用场景,并行测试有以下2种实施方式::1)多处理器并行测试。一般采用两个及以上的处理器,对所有被测对象及参数进行测试,对于软、硬件的资源消耗较高。2)用单处理器实现并行测试结构。通过对不同测试任务的合理调度,划分处理器处理不同任务的时间,实现并行测试[7-8]。这里,采用第2种方式实现地面测控系统的快速自检测试。
(1)主控软件并行处理算法
主控软件作为并行测试流程的发起者,是测试流程的控制核心。主控软件将测试项目转化为相应的多个测试线程。在主控软件启动测试任务后,创建多个测试线程,各线程依据既定计划独立、并行发起测试,相互之间无耦合[9-10]。
(2)测试终端并行处理算法
与主控软件相对应,测试终端是测试指令的执行者,在测试终端软件中,针对主控软件发送的多个并行测试指令,设计专门的“任务缓存区”。测试终端软件将收到的指令先放到任务缓存区中,再从任务缓存区中依次接收任务,创建相应的、相互独立的测试线程,并行处理测试任务,处理完成后将测试结果分别反馈给主控软件,测试终端软件的并行测试算法如图8所示[8]。

图8 测试终端并行测试流程图
3.2 并行测试流程设计
3.2.1 方案概述
故障诊断计算机软件作为自检主控软件,对地面测控系统自检的测试需求,发起若干并行测试线程。中心控制计算机软件作为测试终端软件,一方面接收并响应来自自检主控软件的测试指令,创建相应的测试线程,另一方面调度地面测控系统中的其余被测对象,获取相关测试数据,并向自检主控软件反馈。
3.2.2 自检主控软件工作流程设计
自检主控软件启动后,创建开关量测试、电源供电测试、时间同步脉冲测试、1553B总线测试、测试报告生成等5个线程,并向测试终端软件(即中心控制计算机软件)发送测试指令,所有线程并行发起测试工作。这里,以开关量测试线程为例,简要说明其工作过程:
开关量测试线程启动后,向测试终端软件发送开关量测试指令,然后依次对联锁1、联锁2和允许投放3个开关量进行测试,针对每个开关量测试,软件按照如下工作流程进行处理(以联锁1开关量测试为例)。
1)向测试终端软件发送测试指令,通知当前测试项目为联锁1测试,读取联锁1开关量当前状态并记录、判读;
2)向测试终端软件发送测试指令,通知测试终端软件控制联锁1继电器触点动作,延时一定时间后,读取联锁1开关量当前状态并记录、判读;
3)向测试终端软件发送测试指令,通知测试终端软件复位联锁1继电器,使触点恢复至闭合状态;
4)向测试终端软件发送当前测试项目结束指令,汇总原始记录和判读结果,发送给测试报告生成线程。
待自检主控软件所有测试线程均完成测试工作后,测试报告生成线程将测试数据汇总、整理,生成WORD测试报告,通过以太网发送至中心控制计算机的指定硬盘目录下,供测试人员进行数据分析及归档。
至此,自检主控软件所有测试工作完成。
3.2.3 测试终端软件工作流程设计
如3.2.1节所述,测试终端软件(中心控制计算机软件)作为地面测控系统若干被测对象的控制核心,创建任务缓存线程,接收并存储来自自检主控软件的测试任务指令。根据任务缓存区的指令,分别创建相应的测试线程,各线程同步运行,根据各自的既定策略,按需调度地面测控系统中的被测对象,配合自检主控软件完成当前测试项目。
同样以开关量测试线程为例,简要说明测试终端软件的工作过程:
1)从任务缓存区读取到开关量测试任务,创建开关量测试线程;
2)接收自检主控软件发送的测试指令(仅以联锁1开关量测试为例),得知当前测试项目为联锁1测试;
3)接收自检主控软件发送的测试指令,控制联锁1继电器动作,使触点由闭合转为断开;
4)接收自检主控软件发送的测试指令,复位联锁1继电器动作,使触点恢复为闭合状态;
5)接收自检主控软件发送的当前测试项目结束指令,线程结束。
当测试终端软件接收到自检主控软件发送的软件退出指令后,结束所有线程,软件退出。
4 实施效果
将并行测试技术应用于地面测控系统的自检测试中,并行执行所有测试项目,形成测试流程图如图9所示。

图9 地面测控系统自检并行测试流程图
经过实际测试,采用并行测试方案后,完成全部自检项目测试耗时9min,而如果采用串行测试方案,完成全部自检测试项目耗时24min,并行测试的测试效率提升了166.7%,详见表3所示。通过对比表3中的数据发现,采用串行测试方法自检耗时是所有测试项目的累加和,而采用并行测试技术的耗时时间取决于测试耗时最长的项目。此外,与串行测试方法相比,测试报告生成项目运行耗时由1min增加至9min,原因是采用并行测试技术后,该测试项目的启动时间大大提前,启动后一直在同步搜集其他测试项目的测试数据,运行时间贯穿整个并行测试流程的始终,造成单项耗时增加,但对整个并行测试流程的总耗时影响不大。
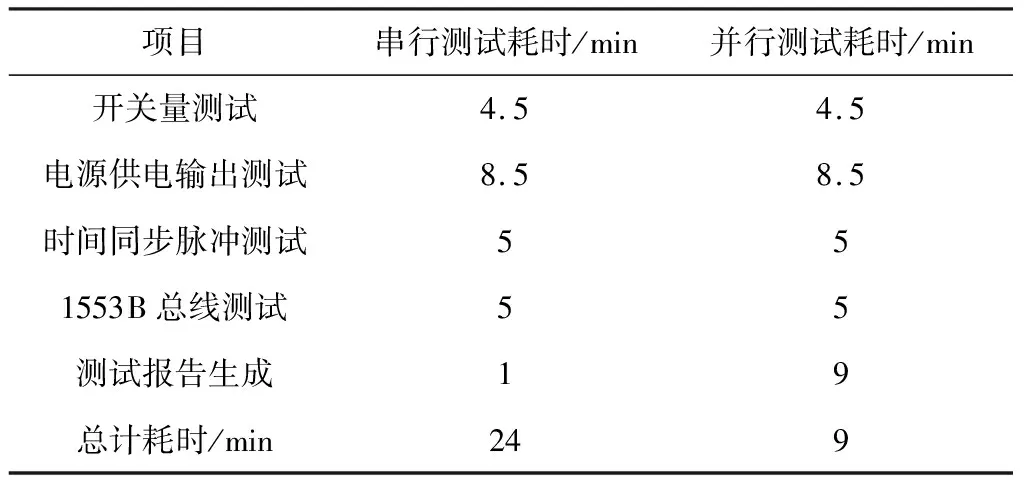
表3 实施效果统计表
通过并行测试方案的实施,可以得出以下几点结论:
1)地面测控系统计算机充足的多任务处理能力,为开展并行测试提供了硬件条件;
2)在并行测试任务中,不能存在互斥性测试需求,各测试线程应相互独立,否则可能导致测试失败;
3)与传统串行测试方案相比,并行测试能够提高测试效率。在硬件资源允许的条件下,并行测试线程越多,对测试效率的提升效果越显著。
5 结束语
为了满足地面测控系统快速自检的测试需求,利用系统中现有的故障诊断计算机的硬件资源,提出并实现了基于并行测试技术的自检方法。该方法在对被测信号进行充分分析、归类的基础上,设计了测试项目及测试方法,使各测试项目并行运行,显著提高了测试效率。将并行测试技术应用到地面测控系统的自检测试中,是对地面测控系统快速测试领域研究的一次探索。进一步将并行测试技术应用到针对飞行控制系统的快速测试中是后续的研究工作。
