遥感卫星任务规划系统设计
2021-11-17冯志强朱永生胡海鹰郑珍珍
冯志强 何 涛 朱永生 胡海鹰 郑珍珍
上海微小卫星工程中心,上海 201203
0 引言
空间遥感致力于提供实时的全空域全谱态势感知,为空间部署和攻防对抗提供必要的信息支援,在国家空间控制和空间作战能力体系中具有基础性作用[1]。与地基观测相比,天基观测不受地球大气和固定布站的限制,可在目标特征获取和观测覆盖性等方面发挥较大优势。空间遥感卫星一般是对太空环境中的人造航天器进行监视[2],其探测手段是采用可见光相机等载荷进行长距离探测,且具备长时间连续监测的能力[3],可获取目标的几何特征、无线电特征,实现对目标测定轨[4-6]。
卫星地面应用系统是以卫星应用需求为牵引,以发挥系统应用效益为中心,以智能化运行管理和体系完备性建设为重点,创新协同应用模式,构建结构合理、功能完备、运行高效、服务可靠的地面应用系统,提升系统运行管理和应用服务能力[7]。卫星任务规划是地面应用系统中的基础,随着空间技术不断发展,在资源与约束不变的前提下,随着卫星数量的不断增加、载荷升级带来的新的约束与更高的应用目标导致有效信息获取率不高、系统整体资源利用率下降、应急任务规划工作更复杂等新的矛盾[8], 为更好地适应新的应用环境并满足不同用户的需求,需要设计自主卫星任务规划系统,基于对卫星需求分析,整理卫星应用场景、主要模块和关键技术,解决实际卫星应用中遇到的问题[9]。
目前国内外也有许多关于卫星任务规划策略和算法的相关研究,如文献[10]为EO-1设计的星载任务规划软件CASPER,可以根据实际情况改变规划目标,并根据当前目标调整任务规划方案[11],但针对特定卫星任务,不具有普适性。文献[12]立足于对地观测卫星任务规划技术的工程应用,阐述和分析了应急卫星任务规划、多系统协同任务规划等规划技术,文献[13-14]分析对地遥感任务中对目标区域覆盖模型及优化算法,提高测绘效能,均只适用于对地遥感任务。文献[15]提出了一种面向在轨实时引导成像的多星自主任务规划方法,实现将多目标向多星系统的分配,增加临机调整策略后,可实时通过用高收益目标替代低收益目标的方式提高整个规划方案的成像收益。文献[16]针对航天器交会任务给出了一种交会任务中特征点和Lambert多脉冲联合的控制方法。
以上研究是针对卫星特定应用,设计了对应规划策略及优化算法提高性能,未涉及太空目标监视卫星任务规划系统设计。本文以某遥感卫星为例,讨论了卫星任务规划系统设计方法,该系统不是基于常规STK和MATLAB的可见性分析平台[17],满足国产化要求,自动分析卫星对太空目标监视的任务机会、计算任务参数、完成多任务冲突消解及任务编排,为卫星在轨应用提供保障。具有时效性好、稳定性高等优点。
1 系统功能
空间遥感卫星需求规划系统是保障卫星用户业务常态化、自动化运行的核心组成部分。主要功能包括观测任务需求分析、在轨维护需求分析、需求计划管理。
观测任务需求分析:接收解析观测任务需求,分析计算对太空目标监视的任务机会,任务参数、输出可见目标详情。
在轨维护任务需求分析:接收解析卫星在轨维护任务需求,分析计算在轨任务机会,任务参数。
需求计划管理:主要功能包括管理卫星资源及约束条件、卫星及目标轨道信息,任务需求制定及动态监控,多星多任务计划优化与评价,需求规划状态跟踪与执行情况评估,需求订单生成与发控。
2 系统组成
遥感卫星需求规划系统主要由观测需求分析软件、在轨维护分析软件、计划管理软件3部分组成,如图1所示。

图1 需求规划系统组成框图
图1中,计划管理软件提供用户操作的人机交互界面,可以进行卫星资源及约束编辑、卫星及目标轨道信息更新,软件自动或人工制定观测任务需求和在轨维护需求分别发送给观测需求分析软件和在轨维护分析软件进行机会分析,任务机会分析结果返回给需求计划软件进行汇总,软件完成目标优选、多任务冲突消解编排,生成任务需求订单并发送地面运控系统,最终生成任务指令并上注卫星。
2.1 观测需求分析软件
任务需求分析软件是基于Code Blocks环境和C++编程语言开发的一套独立运行的进程软件,可运行在麒麟版本国产化操作系统上。主要由任务机会分析部件、轨道预报与约束计算服务部件、需求订单生成部件组成,如图2所示。其中任务机会分析部件对观测任务需求的解析,根据任务需求采用不同载荷任务可见性计算方进行分析处理,完成调用轨道预报与约束计算服务部件,与需求订单生成部件的数据交互。轨道预报与约束计算服务部件能完成对卫星或目标高精度的轨道外推[18]、包括计算太阳、月亮位置、卫星过SAA区时间、地气光影响等。需求订单生成部件根据需求分析部件计算的可见性分析结果,包括任务时间、目标信息、任务期间相对距离、相对角度、相对角速度、太阳光照角、月光角等信息,按照定义的数据库表格式入库。
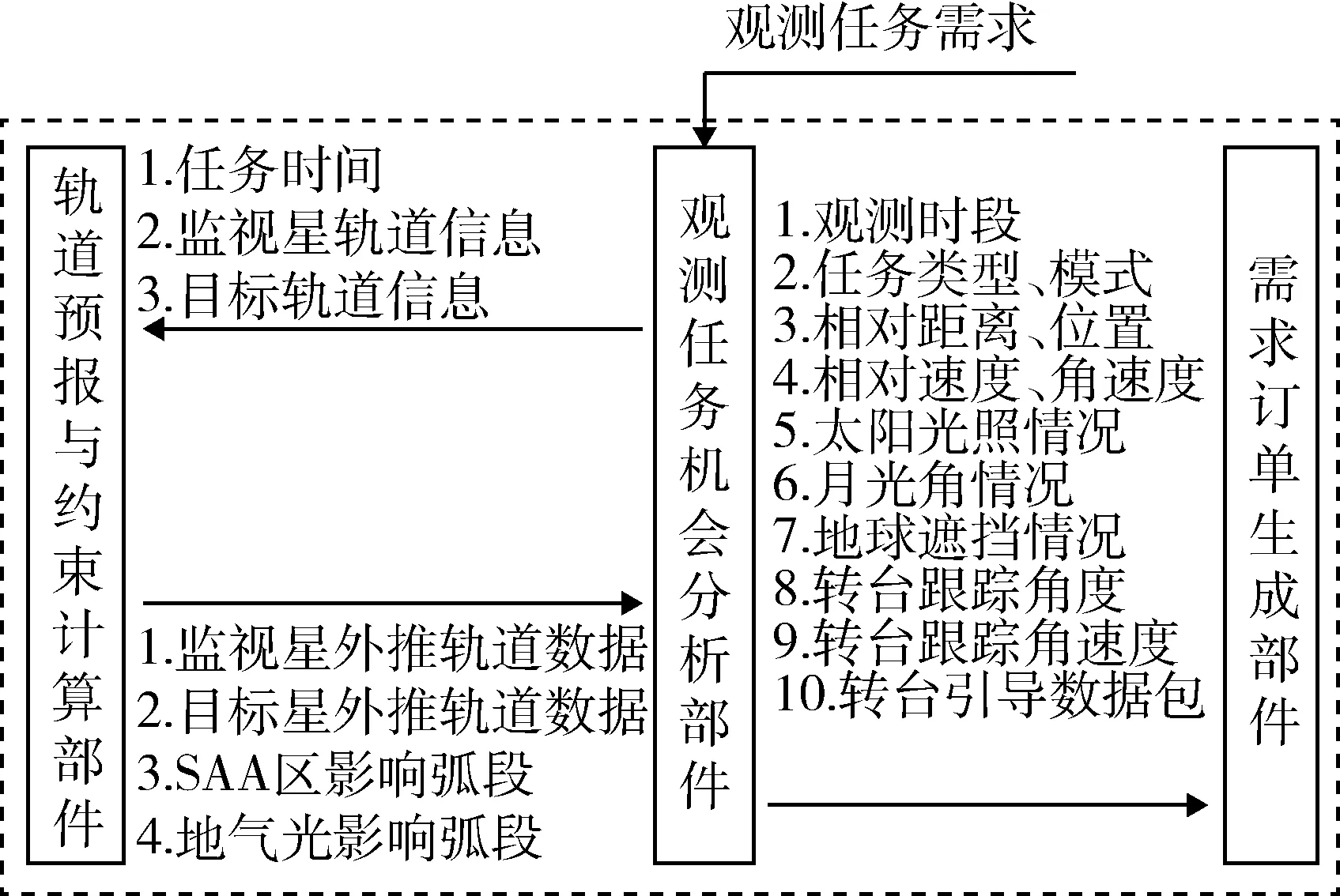
图2 观测需求分析软件组成框图
其中观测任务分析部件监控并读取观测任务需求,解析卫星轨道数据、太空目标轨道数据。卫星及目标轨道数据送入轨道预报与约束计算部件计算得到卫星、目标、太阳、月亮等空间相对位置及约束条件,依据任务可见性分析方法进行观测计算、观测预报[19-20],得到相机观测任务、其它无线电侦收载荷任务的可执行任务时间、目标信息、任务详情。规划算法考虑约束及计算方法简要说明如下:
(1)SAA区判断:通过射线法判断卫星过SAA 时间,以卫星星下点为原点,引出射线切过的边数量为奇数,则过SAA区。
(2)目标可见性:根据卫星轨道,建立基于卫星的准惯性坐标系,计算J2000坐标系至卫星本体系的转换矩阵M。通过坐标转换计算目标相对卫星的方位、俯仰角大小,计算满足任务约束的弧段。
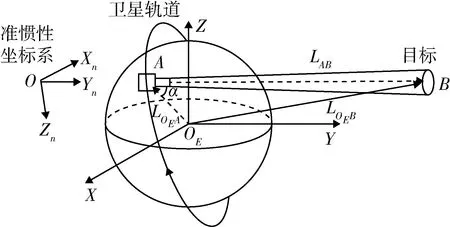
图3 目标可见性计算示意图
(3)月光角计算:根据月亮星历计算相机视轴与对月矢量夹角,约束月光角>10°的弧段。
(4)光照角计算:根据太阳星历计算目标到太阳与目标到卫星矢量夹角,约束夹角<90°的弧段。
(5)地心夹角计算:计算相机视轴到地心矢量夹角,约束夹角>74.9°(卫星高度相关)的弧段。
(6)地影约束计算:根据太阳星历计算目标到太阳与目标到地心矢量夹角,约束夹角>70°(目标高度相关)的弧段。
2.2 在轨维护分析软件
在轨维护分析软件是基于VS2015环境和C++编程语言开发的一套独立运行的进程软件,可运行在麒麟版本国产化操作系统,主要负责相机、转台等载荷的在轨维护任务。软件主要由调度单元、状态数据库、综合处理单元组成,如图4所示。

图4 维护需求分析软件组成框图
维护需求生成有自动触发和人工触发2种方式,自动触发模式下采用定时及监测遥测数据方式,条件满足则触发生成维护需求。软件接收并读取维护任务需求,分析计算得到维护任务的类型及参数,调度维护任务内部处理软件,并将状态参数传入处理软件,同时从维护任务载荷状态设置数据库中读取对应任务状态下的载荷任务参数进行计算,最终将维护任务结果标准化入库。在轨维护任务主要模式及其计算方法说明如下:
(1)相机辐射标校:通过对恒星成像标定相机参数,根据恒星星历,计算其相对卫星的方位,根据卫星姿态约束,转台范围约束计算可执行相机维护任务的弧段,并给出任务所需姿态、转台等参数,需要考虑SAA区、月光角、太阳角、地气光等约束。
(2)相机煺火:空间环境效应噪声增大导致载荷探测能力下降至超出任务指标要求时,调整探测器制冷深度,降低探测器本底噪声,恢复探测载荷性能,通过调用指令模板方式安排空闲弧段执行。
(3)转台自检:完成对转动范围、最大跟踪速度、加速度、跟踪精度的自检,通过调用指令模板方式安排空闲弧段执行。
2.3 需求计划管理软件
需求计划管理软件配置项为满足国产化,跨平台要求,采用BS架构[21]。由计划管理服务端、计划管理客户端、消息队列服务器、数据库服务器组成。服务器端的软件环境为银河麒麟服务器操作系统、神通数据库V7.0与JRE1.8以上版本,作为后台计算软件,实现任务需求管理、多任务筹划等功能,同时采用Rabbit MQ消息队列机制与外部接口通信,所以还包含消息队列服务器。软件部署包括软件制品qfive.jar。客户端的软件环境为麒麟服务器操作系统桌面版,同时需要安装Google Chome浏览器,提供基于Web开发的人机交互界面,为用户提供需求制定、卫星资源、目标资源管理、综合状态监控等功能。数据库服务器存储了卫星约束、卫星及目标轨道、任务需求及需求规划运行过程中的各类数据。各软件模块部署情况如图5所示。

图5 计划管理软件部署图
3 系统接口
遥感卫星监视需求规划系统接口统计情况如下表所示,通信方式有文件传输、共享数据库访问、服务调用、共享存储空间访问等方式。
3.1 卫星轨道根数
卫星轨道根数在数据库中主要以六根数格式存储,可由人工或软件自动进行更新。包括历元时刻(北京时)、a(半长轴)、e(偏心率)、I(轨道倾角)、w(近地点倾角)、o(升交点赤经)、m(平近点角)、大气摄动系数和光压系数。

表1 需求规划系统接口统计
3.2 目标轨道根数
目标轨道根数在数据库中主要以两行根数形式存储[22],可由人工或软件自动进行更新。首行存储了卫星编号、卫星类别、卫星发射年份、TLE历时、平均运动的一阶时间导数、平均运动的二阶时间导数等,第二行存储了卫星编号、轨道倾角、升交点赤经、轨道偏心率、近地点幅角、平近点角、每天绕地球圈数等。每行共69个字符。
3.3 卫星资源信息
数据库中存储了卫星资源及载荷能力,作为可见性分析的输入条件。可由人工或软件自动进行更新,包括卫星代号、卫星名称、卫星载荷、视场大小、最大观测距离、姿态角度最大机动范围、转台机动角范围、转台机动角速度范围等。
3.4 目标编号及特征信息
目标数据库中存储了目标特征信息,支持添加、删除、更新等操作,信息条目包括目标代号、名称、所属国家、类型、尺寸、亮度、无线电频段等。
3.5 任务要求
任务要求文件为XML格式,由软件需求制定界面操作生成,包含了任务分析开始时间、任务分析结束时间、观测类型、观测频次、优先级、观测目标编号及名称、目标类型、卫星标识、传感器标识、传感器工作模式等数据内容,作为观测需求分析和维护需求分析的输入。
3.6 载荷评估数据
载荷评估数据主要是以对卫星遥测进行解析处理得到的卫星载荷性能的评估结果,作为是否需要开展载荷在轨维护的重要指标,包括相机本底噪声评估结果、转台性能等。
3.7 任务要求通知
任务要求通知采用TCP/IP协议进行传输,当软件需求制定界面操作生成任务要求时,发送一条任务要求通知给观测需求分析软件或维护需求分析软件进行分析。包含了任务要求编号、任务类型、优先级、任务状态等数据内容。
3.8 任务要求响应
任务要求响应通知采用TCP/IP协议进行传输,当观测需求分析软件或维护需求分析软件在接收任务要求并开始分析时,更新任务状态为“正在分析”,并返回任务要求响应。当观测需求分析软件或维护需求分析软件完成对任务要求分析时,更新任务状态为“已完成”,并返回任务要求响应。
3.9 任务规划结果
任务规划结果文件为XML格式,作为卫星运控系统生成卫星指令的依据文件,包含了需要生成卫星指令的所有参数信息,包括卫星标识、传感器标识、传感器工作模式、任务执行时间、任务参数等数据内容。
3.10 界面设计
遥感卫星系统需求规划系统计划管理软件为用户提供一个基于Web开发的图形用户界面,方便用户管理卫星资源及约束信息、目标库信息、需求制定、需求状态跟踪等,实现对卫星任务需求规划,其中需求制定界面设计如图6所示。

图6 需求规划系统需求制定界面
分析图6所示的界面和其他需求规划系统界面,将需求规划系统所有子页面的控件和元素内容进行统计,结果如表2所示。

表2 需求规划系统界面设计
4 规划效能分析
需求规划系统软件在收到每日更新的卫星及目标轨道后,自动触发生成需求,进行观测机会分析,并对未来一天的卫星任务开展筹划,最终生成规划方案并发送给运控系统,相比传统人工仿真规划任务的方式,规划效率大幅提高。
任务规划软件采用多线程,目标快速筛选等优化算法,同时在多终端上进行部署以支持多星并行规划。为测试需求规划软件的规划性能,同时对3颗监视卫星进行分析,分别测试日常和应急情况下,规划未来1天、3天、7天任务所需时间,如表3所示。
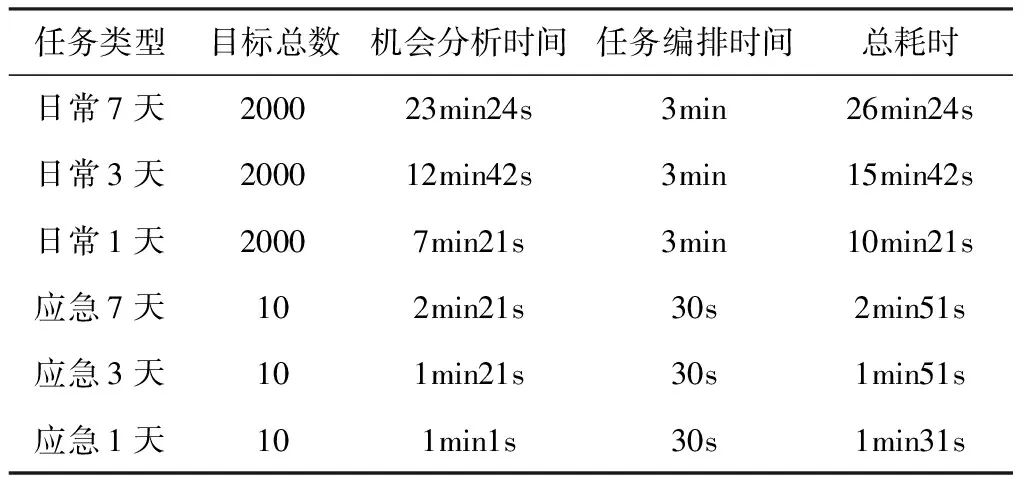
表3 规划时间性能测试结果
根据测试结果,针对目标个数为2000的日常任务,规划未来7天任务,总规划时间不超过30分钟,应急情况下,针对重点目标(一般不超过10个)进行7天机会分析的时间为2分21秒,任务编排时间为30s,总规划时间不超过3分钟,具有较高的时效性。
5 结论
目前该需求规划系统正成功应用于某遥感卫星地面应用系统中,软件常态化运行。根据最新的卫星及目标轨道信息,自动进行观测机会计算。根据卫星载荷工作状态,自动分析判断是否进行维护任务机会分析。最终经过多星多任务筹划、人工确认任务编排结果,生成规划方案并发送运控系统,生成卫星指令并上注卫星。在卫星长达1年的在轨试验过程中,规划软件一直发挥着重要作用。经过分析,软件运行稳定,可靠,时效性好,为卫星在轨任务的正常运行提供了重要保障。
该需求规划系统不依赖于STK和MATLAB,通过将轨道预报、可见性计算等算法进行国产化软件实现,替代STK仿真和MATLAB数据运算功能。运行环境是国产化麒麟操作系统,数据库采用的是国产化神通数据库,满足软件国产化设计要求。
