补充构架航线在低精度POS航摄数据测图中的应用
2021-11-17邓永火
邓永火
(厦门图辰信息科技有限公司, 福建 厦门 361008)
0 引言
随着遥感影像数据的广泛应用,快速获取最新的遥感影像数据显的尤为重要。利用无人机搭载各类传感器进行低空航摄获取各类数据的手段已被测绘各界所认可,也是解决快速获取数据的重要手段,这一技术也为现代测绘的发展起到关键作用[1]。
无人机在低空遥感领域的应用也有十余年,无人机厂商越来越多,且种类多样,自身飞控、飞行安全、飞行时间、搭载的传感器等都有着显著提升,这也让无人机系统在测绘行业逐渐成为不可缺少的设备[2]。近年来测绘单位大量采购无人机航摄设备,其中大多数固定翼无人机暂未安装动态差分定位模块,无法获得高精度位置与姿态测量系统(Position and Orientation System,POS)信息数据[3],这就需要在内业空三加密过程,提供大量的像片控制点成果,以满足精度要求。近几年,随着差分定位技术的不断完善,差分模块也不断向微型、高性能发展,其在无人机上的应用也越来越普遍,实时动态(Real Time Kinematic,RTK)和动态后处理(Post Processing Kinetic,PPK)成为了提升无人机定位精度的关键技术[4]。据国内外学者研究发现,使用双频全球导航卫星系统(Global Navigation Satellite System,GNSS)接收机,在运动条件下的定位精度可以达到厘米级,将差分模块集成于无人机上,经辅助光束法平差,同样可以获得厘米级的对地定位精度,适用于快速三维构建与地形成图[5]。可见,差分技术为摄影测量作业提供了精度保障,也为减少野外工作量指明了方向,其中,部分学者在辅助光束法平差的基础上,采用构架航线布设模式,增加了影像的重叠范围,实现影像关联的加固,进而提升了平差的鲁棒性[6],经实验验证,在大比例尺测图中,仅需在区域范围布设4个角点即可满足精度要求。
本文致力于研究在减少野外作业量的同时,如何更大化地利用现存的含低精度POS信息的影像数据,进而达到测图精度要求。考虑大疆公司研制的精灵4 RTK四旋翼无人机集成了全新的RTK模块,拥有强大的抗磁干扰和精准定位能力,不仅飞行姿态稳定,而且可以提供实时厘米级的实时定位精度。利用这样的优势来执行架构航线的飞行任务,就能获得很稳定的高精度的架构航线影像坐标,再加上少量分布均匀的控制点,探索是否可以提升空三加密的成果精度,在降低成本的同时能否提高生产效率。因此,本文将对实验中所获得的数据情况进行阐述和说明。
1 原理与方法
1.1 构架航线下的区域网平差原理
摄影测量的野外控制点布设方案中有两种控制点布设形式:一是在常规航线的两端布设高程控制点;二是在常规航线的基础上增飞两条垂直的构架航线,并在任务区域四个角分别布设平高控制点。对于一般航摄条件而言,航线之间满足4度或者6度重叠,构架航线与常规航线之间同样满足这样的重叠条件,但在空中三角测量过程,我们选择一条构架航线与两条常规航线间的连接点,这样可以达到6度甚至9度重叠。可见,构架航线的引入能较好地得到相应的转点,有效消除GNSS的漂移误差,下面以高程平差为例,建立误差方程。
设常规航线标号为i、i+1,构架航线标号为j,可以列出如下误差方程式:
(1)
经做差消去ZT,得到改化后的误差方程形式如下:
(2)

构建航线参与空中三角测量,可加密出大量连接点,增加模型稳定性,因此,可以降低对控制点的需求。将高精度差分GNSS摄站坐标应用于区域网平差过程,可进一步提升模型对地定位精度,减少控制点布设数量。
1.2 GNSS辅助空中三角测量方法
GNSS辅助光束法平差是指在空中三角测量过程中,将差分GNSS模块获取的高精度位置信息作为观测量,与像点坐标、地面点坐标、检校参数一同参与到联合平差的过程[9]。辅助光束法平差可以有效降低连接网的偏移误差,进而实现将地面控制转移到空中绝对定位。此时,再引入少量地面控制点后,就可以校准GNSS系统误差,完成基准统一,达到减少控制点需求数量的目的。
根据摄影测量共线条件方程,列得误差方程如式(3)所示:
(3)

由于本文常规航线和构架航线所获取摄站坐标精度不一致,因此,应用式(4)评定GNSS摄站坐标的权矩阵:
(4)

(5)
经最小二乘平差解算,获得各观测值最优解。
2 研究概况
2.1 研究区域情况
实验选取某丘陵地区,地理位置在34°30″~34°32″N和113°05″~113°06″E,总面积约3 km2,测区属北暖温带大陆性季风气候,四季分明、温差大,常年干旱少雨,降水量多集中在6~8月。年平均气温14 ℃,无霜期238 d,年平均降雨量641 mm,全年日照时间约2 400 h,光照充足,7月份最热,1月最冷,昼夜温差大。测区分布包括植被、河流、村庄、道路等,利于无人机飞行与控制点布设。
2.2 数据获取
实验选用精灵4 RTK四旋翼无人机作为航摄平台,为保证立体测图的影像重叠要求,在航线规划时将航向重叠度设置为80%,旁向重叠度设置为60%。首先,在未使用RTK功能的情况下,完成测区南北常规5条航线飞行任务,获取影像179张;而后,架设基准站,使用RTK功能,完成东西2条航线飞行,获取影像34张,即共获取影像213张。无人机系统构成如图1所示。

图1 精灵4 RTK无人机系统
与此同时,在任务区域应用RTK量测了34个点位作为地面控制点与检查点,点位平面坐标系为CGCS2000,三度带投影,高程采用正常高,任务区域地理概况和点位分布情况如图2所示。
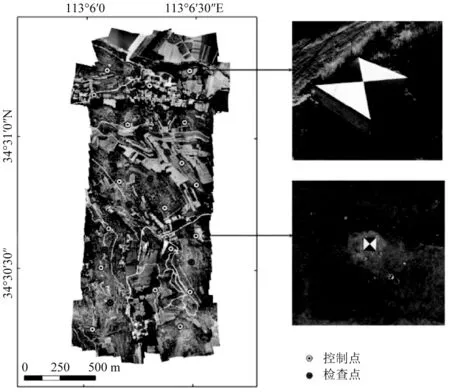
图2 区域地理概况和点位分布情况
2.3 作业流程
利用无人机航空遥感资料,根据野外实测控制点进行全数字空中三角测量计算,采用inpho无人机数字摄影测量工作站,通过光束区域网整体平差,得到加密点坐标成果及相片外方位元素,组织实施测区1∶2 000比例尺数字高程模型(Digital Elevation Model,DEM)、数字正射影像(Digital Orthophoto Map,DOM)、数字线划地图(Digital Line Graphic,DLG)数据生产,无人机影像处理流程如图3所示。

图3 无人机影像处理流程
3 研究方法
3.1 补充架构航线设计
为改善航摄过程产生的偏移误差,传统空中三角测量要求在航线两端布设控制点,实现精度校正[7]。构架航线的增设可以有效提高影像重叠维度,提升连接点数量,在某种程度上,达到了加固平差网的目的[8]。本文在常规航线的基础上,布设两条垂直于常规航线的构架航线,如图4所示。其中,构架航线采用RTK定位功能,可以获取高精度影像位置信息,故在增强模型稳定性的同时,能够进一步降低对控制点的需求。
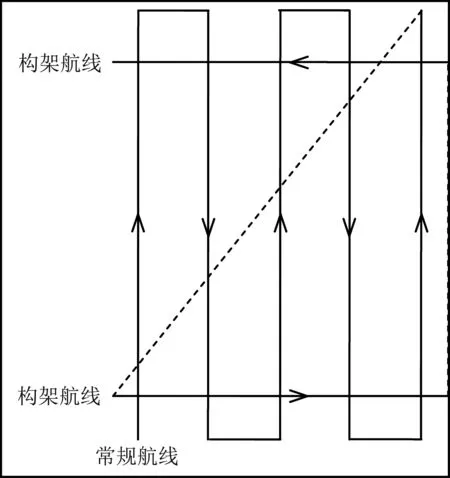
图4 构架航线布设形式
3.2 精度评定原则
GNSS辅助光束法平差恢复了影像的空间绝对位置,建立了像点、地面点的几何关系。因此,对于影像上的任意像点,均可通过计算获得其对应的地面点坐标[10]。本文通过野外控制测量的方式布设了一定数量的地面控制点与检查点,其中检查点也可以通过模型解算获得坐标,因此,可以统计出检查点在三个坐标方向的中误差ux,uy,uz,如式(6)所示:
(6)
式中,(Xw,Yw,Zw)表示经外业测得的坐标值;(Xn,Yn,Zn)表示经辅助光束法平差解算所得的坐标值;n为检查点个数。
4 数据处理
4.1 实验方案
本文在影像处理时设计了两组实验,第一组实验是验证补充构架航线的引入能否提升影像的对地定位精度;第二组实验是验证补充构架航线能否有效降低对控制点数量的需求,并探究最优的控制点布设原则。其中实验一主要对两种方案实施精度比较,实验二是对四种方案实施精度比较,每种方案的设置情况如表1所示。
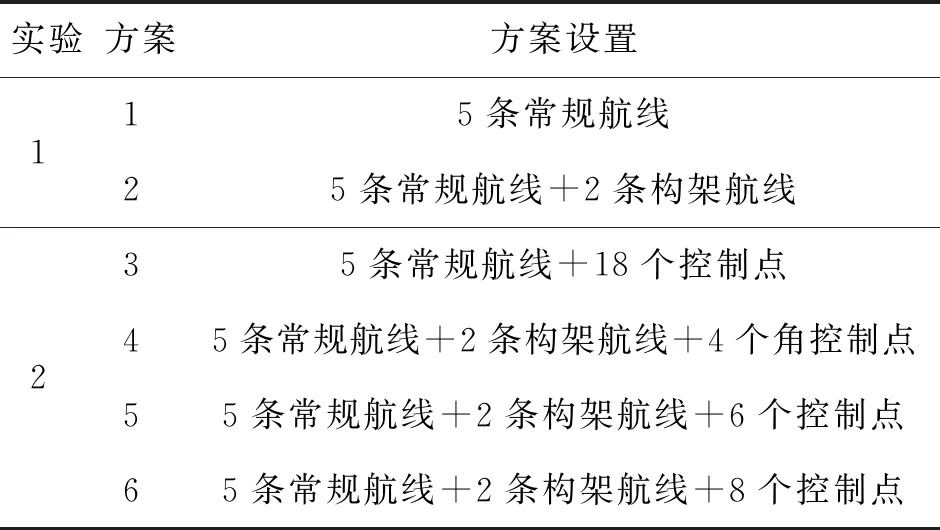
表1 实验方案情况
对以上实验方案采用inpho软件进行空三加密,并完成控制点刺点与检查点立体量测,空中三角测量的具体实施要求包括以下几个方面:
(1)空中三角测量正式实施前,应进行充分的准备工作。包括进行加密分区,创建测区目录、测区信息文件、摄影信息文件、控制点坐标信息文件,进行影像畸变改正并制作金字塔影像。
(2)平差方法:光束法区域网整体平差。
(3)空中三角测量采用半自动交互式作业方式,每个像对连接点应分布均匀,每个标准点位区应有连接点。自动相对定向时,每个像对连接点数目一般不少于30个。
(4)标准点位区落水时,应沿水涯线均匀选择连接点,增强连接强度。
(5)航向连接点宜3度重叠,旁向连接点宜6度重叠,作业范围线以外应有连接点。
(6)加密区应选取一定数量的检查点,用于DOM、DEM、DLG成果精度评定。
4.2 结果与分析
首先,对实验1的2种方案实施空中三角测量计算,将模型中拾取的检查点坐标与野外测量结果对比后,统计16个检查点的相对误差情况,如图5所示。

图5 检查点相对误差统计情况
应用公式(4)计算图5所示的相对误差结果,得到两个方案下检查点在三个坐标方向的中误差情况,如图6所示。

图6 实验一检查点中误差
本文通过实验二设计的4种计算方案,验证在构架航线条件下,引入控制点后影像的对地定位精度及对控制点数量的依赖程度。在实施空中三角测量计算后,同样将检查点的模型拾取坐标与野外测量结果作对比,得到相对误差统计结果后,计算各方案下检查点的中误差情况,如图7所示。

图7 实验二检查点中误差
实验一,在未使用构架航线时检查点在三个方向的中误差为:ux=1.20 m;uy=1.17 m;uz=1.69 m,在引入含有高精度构架航线后,检查点在三个方向的中误差为:ux=0.49 m;uy=0.82 m;uz=1.55 m。可见,构架航线的引入能有效提升空中三角测量精度,其中在水平方向上精度提升明显,高程方向提升略差。
实验二,通过四种方案下检查点的中误差对比,在采用常规航线和传统控制点布设模式下,检查点在三个方向的中误差为:ux=0.05 m,uy=0.04 m,uz=0.13 m;采用构架航线后,当引入4个角控制点时,检查点在三个方向的中误差为:ux=0.13 m,uy=0.09 m,uz=0.25 m;当引入4个角控制点和区域中间2个控制点后,检查点在三个方向的中误差为:ux=0.06 m,uy=0.05 m,uz=0.11 m;当引入4个角控制点和区域中间4个控制点后,检查点在三个方向的中误差为:ux=0.04 m,uy=0.05 m,uz=0.09 m。可见,在引入构架航线后,仅需布设少量的地面控制点就可以大幅度提升影像的对地定位精度,就本文实验而言,当引入区域6个控制点后,空中三角测量精度就与传统航线布设18个控制点方案精度相当,当继续增加控制点数量,精度提升则不再明显。因此,本文补充构架航线的最佳控制点布设模式即为4个角控制点与2个区域中间控制点。
5 结束语
在利用无人机摄影测量技术实施地形图生产过程中,为降低野外控制点布设的工作量,本文设计了补充构架航线并分析了其对空中三角测量精度的影响,在GNSS辅助光束法平差过程中,通过合理设置不同观测值权重,提升了模型的解算精度与稳定性。经两组实验设计,对不同数据处理方案实施精度分析,得出补充构架航线能有效提升光束法平差精度,减少野外控制点布设数量,当选用4个角控制点与2个区域中间控制点的布局时,测量精度最佳,满足大比例尺测图精度要求。
