基于脊波变换的生态景观线特征提取模型仿真
2021-11-17洪堂安
洪堂安,杨 斌
(南昌航空大学,江西 南昌 330063)
1 引言
随着社会的不断发展,人们在对城市生态环境进行改造以及适应的过程中,建立起“自然-经济-社会”复合生态系统[1]。城市生态景观可通过物质、能量代谢以及生物化学循环等过程来实现,将其进行结合,形成具有特定结构、功能以及服务的生态环境。
目前,城市化的快速发展使城市生态景观随之发生了巨大变化,伴随着计算机技术和图像处理技术的迅速发展,快速高效地获取城市生态景观的局部特征,对后续的城市生态景观的设计与构建具有重要意义。鉴于生态景观局部特征提取的重要性,因此,准确高效地获取生态景观局部特征,渐渐成为了目前研究的热点内容[2]。
王旭[3]等人提出基于矩阵非负分解的图像特征提取方法。该方法首先将匹配追踪算法与Wigner-Ville分布相结合,获取时频分辨率较好的时频图像线特征参数;其次利用局部二值模式(LBP)算子对时频图像的灰度矩阵进行重新编码;最终通过非负矩阵分解算法取得时频图像对应的低维线特征参量以及对应的时频图像线特征,从而完成对生态景观的线特征提取。但该方法在提取生态景观特征时,难以有效对含噪信号进行抑制,导致线特征提取耗时较长。蔡道清[4]等人提出基于小波变换的特征提取方法。该方法首先构建Retinex光照模型,对生态景观原始图像进行裁剪和归一化处理;其次利用Haar小波基将处理后的图像进行多级分解,获取图像的高低频成分;最终利用阈值法对小波分解后高频系数进行更新,取得多尺度反射模型,将该模型进行重构,实现对特征的提取。然而该方法在对生态景观进行提取线特征时,难以保留具有直线或是超平面奇异性的信号,导致线特征提取均方差较大。白鑫[5]等人提出基于双极特征度量的特征提取方法。该方法首先将图像进行转换,形成HSV色彩空间,并将其进行分割,取得若干个非重叠子图像,对子图像的均值、标准差以及偏斜度进行计算,获取结果来表征CM;其次通过Euclidean距离对图像CM进行提取与度量,将取得结果形成图像集;最终提取每个目标的ART和EH特征,完成对生态景观的特征提取。但是该方法的特征提取准确度较低。
为了解决上述方法存在的问题,本研究提出基于脊波变换的生态景观特征提取方法。该方法采用脊波变换对生态景观图像数据进行处理,结合SIFT线特征提取方法,基于此完成对生态景观的线特征提取。
2 脊波变换
脊波变换(Ridgelet变换)的相关概念由美国Stanford大学的E.J.Candes和Doboho教授提出[6]。Ridgelet的前身是Wavelet,由于Wavelet同时具有时局域性、频局域性,便于表示瞬变信号,相对傅立叶分析来说有很大进步。因此,其在信号处理领域中被得到广泛应用。在将图像的零维度或者点状奇异性特征进行表示时,小波变换较为适用,当图像中边缘部分出现高维奇异性特征时,小波变换不足以进行表示。因此,以小波变换为基础,相关学者提出脊波(Ridgelet)变换。脊波变换能够有效地对图像边缘高维直线或者是超平面奇异性问题进行处理[7]。
2.1 连续脊波变换
当函数ψ满足于以下条件时
(1)
此时,函数ψ称为容许激励函数。以函数ψ为容许条件的脊波函数表示为
(2)
式中,尺度因子表示为a,相对位移表示为b,将u定义为u=(cosθ,sinθ),x定义为x=(x1,x2),此时,脊波函数表示为
(3)
式中,a>0;a,b,x1,x2∈R;θ∈[0,2π]。ψa,b,θ为R2→R2。因此,脊波函数处于直线x1cosθ+x2sinθ=c方向上是常数,而与该直线垂直方向上是小波函数。
连续脊波变换与Radon变换间有着密切的联系,将Radon变换进行定义:
(4)
此时,脊波变换可通过式(5)进行表示
(5)
式中,θ是常量,t是变量。脊波变换是沿着Radon变换切片方向上的一维小波变换。
由于Radon变换本身是沿直线L(u,t)进行变换的,即L(u,t)={x∈Rd|u·x=t,|u|=1},当d=2时,此时,u=(cosθ,sinθ),L(u,t)=L(θ,t)。对于直线型的奇异性来说,Radon变换处于某方向u上会与直线形的奇异性出现重合情况,脊波变换沿这个方向的直线进行积分,使直线形的奇异性进行转化,形成点状的奇异性,取得较好的直线奇异性效果[8]。
2.2 基于脊波变换的图像去噪
通常情况下,软阈值函数与硬阈值函数是最为常见的阈值处理方法。软阈值函数也称收缩函数,其具有连续性等特点,在数学等应用中便于处理。硬阈值函数与之相反,不具有连续性,但更接近于实际应用。当处于空间较大的范围内,以极小极大准则为依据,软阈值函数相对于硬阈值函数来说,更接近于理想值,经过硬阈值处理后的信号要比软阈值处理后取得的信号粗糙[9]。
然而,对于硬阈值方法来说,估计系数在阈值处不是连续的,将不连续的系数进行重构,取得的信号会出现振荡情况;对于软阈值方法来说,估计系数在阈值处连续性较好,但当估计系数大于阈值时,估计值会与实际系数出现偏差,影响到重构信号与真实信号的接近程度。为此,本研究提出软阈值折中法,对其进行定义
(6)
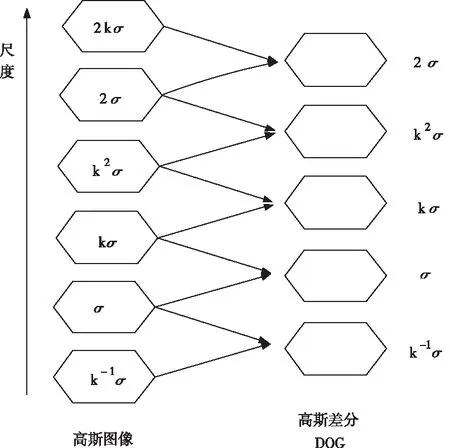
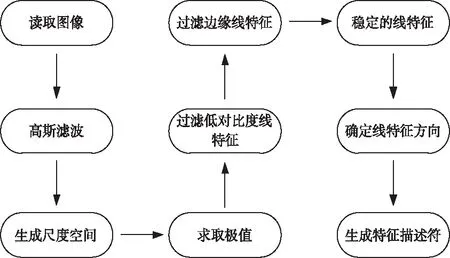
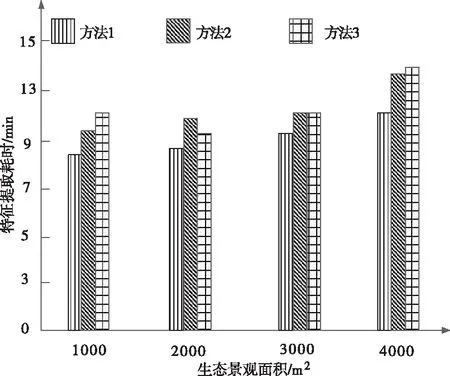
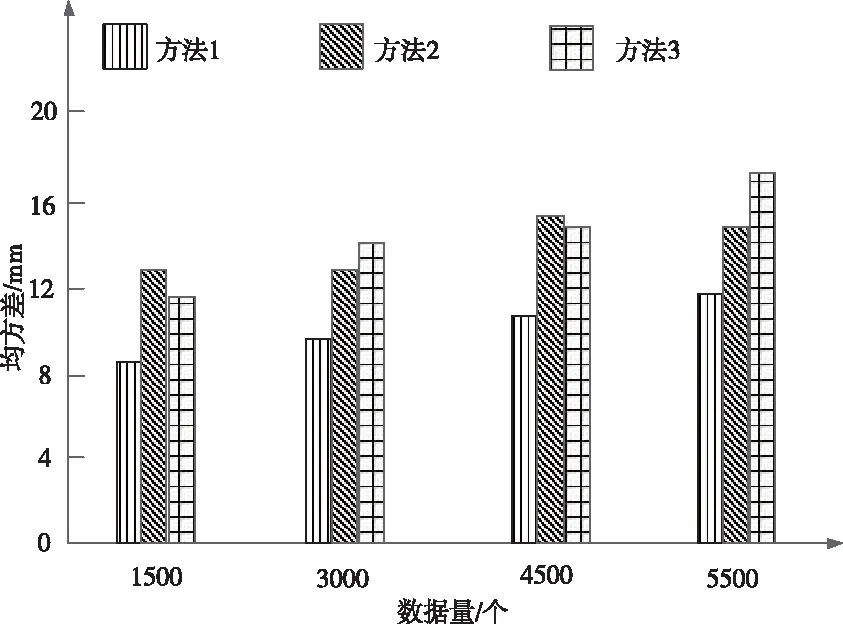
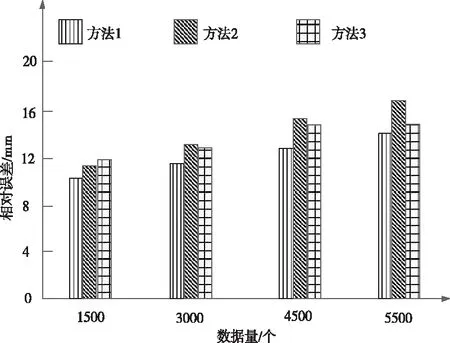
式中,变换系数值表示为W;阈值表示为δ;常数表示为a,即a∈[0,1];若a取值为0时,上式即是硬阈值估计方法,若a取值为1时,上式即是软阈值估计方法,若0 如图1所示,多尺度技术可有效地对生态景观图像中的特征、内容进行提取,其主要原理是将生态景观图像通过多尺度进行表达,以及在不同尺度下对生态景观图像进行分别处理。在许多情况中,以某种尺度看不出或者难以获取的图像特征,换一种尺度对图像进行检测[10],可很容易看出或被检测到。 图1 尺度空间生成图 因此,对生态景观图像尺度空间函数进行定义,将其表示为L(x,y,σ),将高斯函数作为卷积核,其二维高斯函数表示为 (7) 式中,高斯正态分布的方差表示为σ。基于此,将输入图像表示为I(x,y),在不同尺度下,所对应的尺度空间表示为 L(x,y,σ)=G(x,y,σ)⊗I(x,y) (8) 式中,图像的像素位置表示为(x,y),卷积操作表示为⊗,尺度空间因子表示为σ。当尺度空间因子的值越小,代表该图像被平滑的区域就越少,其所对应的尺度空间就越小,大尺度对应于图像的概貌特征,小尺度对应于图像的细节特征。 对尺度空间中的稳定线特征进行检测,利用高斯函数之差对图像进行卷积操作,取得相应的高斯差分DOG函数,表示为 D(x,y,σ)=(G(x,y,kσ)-G(x,y,σ))⊗I(x,y,σ) =L(x,y,kσ)-L(x,y,σ) (9) 式中,K是一个常量。将原始图像通过高斯函数进行卷积,得到一组新的图像,将其图像在尺度空间借助常量K进行分离,分离后图像至少为S+3个,其S取值为3。此时极值检测才可覆盖到一组中的所有图像。通过高斯差分对图像中极值点进行提取,作为候选线特征,在将处于低对比度和处于边缘的线特征进行过滤,最后取得稳定的线特征。 3.2.1 获取极值点 获取高斯差分图像中的极值点,需将样本像素点与其相邻的8个像素点进行比较。同时还要和金字塔分层图像中上下相邻图像层中的9个像素点进行比较,因此,共需要与26个像素点进行比较。 3.2.2 边缘线特征过滤 由于图像边缘处的线特征相对不稳定,因此,本研究将边缘处具有低对比度的线特征进行过滤。由于图像边缘处线特征在高斯差分函数的峰值处与边缘交叉处具有较大的主曲率值,但处于垂直方向的曲率值较小,利用这一特点,可将其边缘处线特征进行过滤,其计算公式如下 (10) 式中,矩阵H的迹表示为Tr(H);矩阵H的行列式的值表示为Det(H);较大的特征值表示为α;较小的特征值表示为β;矩阵H的两个特征值间的比值表示为γ。 3.2.3 低对比度的线特征过滤 将尺度空间函数D(x,y,σ)泰勒展开,得到下式 (11) 式中,D(X)即是X=(x,y,σ)T样本点的偏移量。 在此基础上,对该函数进行求导,并将其值设置为0,可以得到X的极值,表示为,求导公式如下 (12) 将式(12)进行展开,可得到 (13) 3.3.1 获取线特征方向 线特征具有邻域像素的梯度方向分布特性,利用该特性,对线特征进行指定方向参数。对图像,其梯度值以及方向均可通过像素点的插值进行预测 (14) 式中,将图像定义为L(x,y),其梯度值表示为m,其方向表示为θ,每个线特征多处于的尺度表示为L,上式即为(x,y)处的梯度值和方向。 3.3.2 生成特征向量 经过上述进行获取线特征,为了避免受光线变化的影响,需将线特征描述符进行转化,把线特征描述符转化为向量标准化的单位长度。即使图像对比度发生变化时,像素值会自动乘以一个常量,随之梯度值也会乘以相同的常量,最终形成特征向量,SIFT特征提取流程如图2所示。 图2 SIFT特征提取流程图 为验证基于脊波变换的生态景观线特征提取方法的可行性与有效性,设计如下真实验。实验环境如下:操作平台硬件配置CPU为四核i5-2370M,主频4.8GHz,内存16GB(其中显存分配2GB),Win 10旗舰版,开发软件选用Matlab2019a。 为突出实验结果的有效性,分别采用基于脊波变换的生态景观线特征提取方法(方法1)、基于矩阵非负分解的时频生态景观图像线特征提取方法(方法2)、基于小波变换的生态景观图像线特征提取方法(方法3)展开相关实验,对比不同方法的线特征提取耗时情况,对比结果如图3所示。 图3 对比不同方法的特征提取耗时结果 分析图3可知,随着生态景观所提取部分面积的增加,方法1的特征提取耗时还是要优于方法2和方法3,证明方法1提取特征时效性更强。这是因为方法1在对生态景观线特征进行提取时,利用脊波变换对图像进行处理,有效去除图像含噪信号,缩短了线特征提取时间。 对比不同方法的线特征提取均方差,对比结果如图4所示。 图4 对比不同方法的均方差 由图4数据可知,方法1的生态景观线特征均方差要小于方法2与方法3。这是因为方法1采用脊波变换方法去除了生态景观图像含噪声的像素点,有效保留具有直线或是超平面奇异性的信号,使方法1在对生态景观线特征进行提取时,所产生的均方误差较小。 对比不同方法的线特征提取相对误差,对比结果如图5所示。 图5 对比不同方法的特征提取相对误差 据图5数据可知,方法2与方法3的线特征提取相对误差均高于方法1,方法1的线特征提取相对误差较小,证明方法1的准确性更高。这是因为方法1在对生态景观线特征进行提取时,利用脊波变换对图像进行降噪处理,可高精度对具有较好稀疏表达性能的含噪信号进行抑制,从而降低了生态景观线特征提取相对误差,提高了线特征提取准确性。 在人口膨胀和快速城市化的全球化背景下,构建人与自然和谐的生态景观是城市景观规划和设计的基本美学观和价值观。利用传统的线特征提取方法在对生态景观线特征进行提取时,因缺少对生态景观图像进行变换处理过程,导致线特征提取耗时较长、均方误差较大以及提取特征准确度较低。针对此问题,本研究提出基于脊波变换的生态景观线特征提取方法。由仿真结果可知,该方法取得了较为理想的线特征提取结果。但是对于边缘较为光滑的物体,该方法提取的线特征较少。因此,下一步的研究中考虑将SIFT与小波变换相结合,从而进一步优化该方法。
3 基于SIFT的线特征提取方法
3.1 生成尺度空间
3.2 线特征提取
3.3 特征描述符的生成
4 实验与结果
5 结束语