地形遮蔽下雷达网的融合探测包络计算
2021-11-17冉华明
丁 宇,冉华明
(1.南京信息工程大学江苏省大数据分析技术重点实验室,江苏 南京 210044;2.南京信息工程大学江苏省气象能源利用与控制工程技术研究中心,江苏 南京 210044;3.中国电子科技集团公司第十研究所,四川 成都 610036)
1 引言
雷达网是指将固定雷达、机动雷达、常用雷达与备用雷达、大型远程预警雷达及低空补盲雷达等各种体制的雷达交错配置,组成分布式雷达情报网,实现协同作战、整体探测、区域对抗、情报共享等功能, 达到合理的威力组合,全面采集区域内的有用信息,为作战决策提供高质量、高可靠性的情报[1-3]。雷达网的融合探测包络是该雷达网整体探测威力的直观体现,也是评价一个雷达网性能的重要指标,对雷达网的探测威力性能进行分析,能够有效地掌握雷达网的工作能力,为雷达网布站提供支撑,使得雷达网内雷达布站更为合理,提高整个雷达网的探测能力。相关科研团队针对雷达网的融合探测包络计算这一问题开展了一系列的研究[4-18],齐锋等人提出了一种单雷达三维探测威力可视化方法,将雷达探测的二维包络线与天线垂直面上的方向图相结合,生成三维的探测威力数据[4],刘香岚等人在该方法的基础上,研究了在地形遮蔽条件下的雷达网探测威力,但上述两种方法均只能实现单雷达的探测包络计算或各雷达包络叠加,无法生成有效的融合包络[5]。郭拉克等人提出一种网格分割矩阵筛选算法,通过将各雷达的威力范围分解成多个网格并对所有网格矩阵求和的方式获取雷达网的探测威力范围,但该方法会在威力边界处产生误差[6]。梅发国等人根据网格划分思想,将雷达探测威力进行单元分割后,拼接所有网格获取雷达网的探测边界和覆盖系数等信息,基于网格思想计算雷达网的探测边界,网格剖分的颗粒度越小,探测边界计算的精度就越高,但同时增加了计算量[7]。王树文使用逐点法描绘雷达边界,一次显示雷达边界点,但未能考虑顶空盲区情况,且不适用于复杂地形[7]。
针对上述问题,本文提出了一种基于分弧段连接矩阵的雷达网探测能力分析的算法,首先对单雷达地形遮蔽下的探测能力进行分析,通过判断雷达网中各雷达之间的关系,计算相交雷达的交点信息,在各雷达边界交点的基础上,将雷达边界分成若干分弧段,筛选出组成雷达网探测区域边界的分弧段,建立分弧段连接矩阵,基于该矩阵计算雷达网融合探测包络,分析雷达网探测能力。
2 单雷达地形遮蔽下探测能力分析
雷达波束在空间传播过程中,受到雷达站周围的地形遮挡和地球曲率的影响,使得雷达的实际探测范围比雷达的理论探测范围小,形成雷达探测遮蔽盲区,如图1所示。
对于高度层h1,由于地球曲率的限制,雷达只能探测到A1到B1的范围;
对于高度层h2,由于存在地形遮挡,雷达只能探测到A2到B2的范围;
对于高度层h3,地形遮蔽和地球曲率对雷达的探测能力都没有影响,雷达的探测能力受到雷达本身的能力约束,雷达能探测到A3到B3的范围。

(1)
其中,θ为雷达探测仰角,H为探测绝对高度,rd为雷达探测距离,RE为考虑地球折射时的等效地球直径,取17000km。

图1 雷达探测遮蔽盲区图
3 雷达威力边界预处理
雷达网整体探测威力边界由各雷达的威力边界融合组成,根据第2节的内容计算各个雷达在某个高度层的威力边界,将每个雷达的威力范围看成一个独立的区域,其中若雷达具有顶空盲区,则将雷达的顶空盲区包络也看成一个独立区域,这些威力边界由一系列离散边界点组成。
在此威力边界的基础上,对雷达的威力边界进行预处理,威力边界预处理主要包括威力边界包含关系判断、威力边界弧段划分、分弧段筛选三个部分。
区域边界预处理如图2所示,图中,r1表示雷达1的探测边界,r2表示雷达2的探测边界;点A,B表示两个雷达区域边界的交点;弧段1,2,3,4表示区域1和区域2的边界划分成的4个分弧段。
根据预警指标特性不同,通过预警指标来辨识工作面突出危险性,并依此建立预警规则的方法,主要有3种:临界值比较法、逻辑判断法和组合分析法,其中临界值比较法主要针对第2种指标分类中的空间距离类指标、可测定类指标和二次分析类指标,其主要方法是根据预警指标数值大小与预先给定的阈值比对,来判断突出事故发生危险的程度并确定出相应的预警等级;逻辑判断法主要针对定性观测、检查类预警指标,这类指标是一种定性描述,其预警规则的建立方法是当指标出现时,发出报警,当指标不出现时,不发出报警;组合分析法是上述2种方法的结合,即将多个指标组合起来判定突出危险程度,建立一条预警规则来给出预警结果。

图2 雷达边界预处理示意图
3.1 威力边界包含关系判断
雷达威力边界由一些离散边界点相连组成,采用射线法确定每个雷达的边界点是否在其它雷达的威力范围内,以此来确定雷达探测区域两两之间的关系:包含、相交、分离。若两个雷达区域相交,则需计算出两个雷达区域相交的交点信息。
3.1.1 射线法确定点与多边形的关系[19-21]
射线法原理如图3所示,以点p为起点做一条射线,可以得到该射线与多边形边界相交的次数,若相交的次数为奇数,则该点在多边形内,否则该点在多边形外。

图3 射线法基本原理示意图
3.1.2 雷达网边界交点计算
如果两个区域相交,分别找到其边界上离交点最近的边界点组成的线段,以此来计算区域边界交点,如图2所示,C、D为边界r1离散后处于r2内外相邻的两个点,E、F为边界r2离散后处于r1内外相邻的两个点,则可根据线段CD和EF确定相邻区域的边界交点。
点(x10,y10)和点(x11,y11)组成的线段满足方程
A1x+B1y+C=0
(2)
点(x20,y20)和点(x21,y21)组成的线段满足方程
A2x+B2y+C=0
(3)
则方程
st.x∈[min(x10,x11,x20,x21),max(x10,x11,x20,x21)],
y∈[min(y10,y11,y20,y21),max(y10,y11,y20,y21)]
(4)
的解即为两个线段的交点。
计算雷达网所有雷达之间的交点信息,组成雷达网边界交点集合P={p1,p2…,pN}。
3.2 区域边界弧段划分
当雷达网中所有雷达区域边界都划分完成后,得到雷达网边界分弧段集合C={c1,c2…,cM}。
3.3 分弧段筛选
雷达网的整体探测威力范围边界由各个雷达区域边界上的分弧段组成,这些分弧段应该满足的条件为:分弧段位于雷达区域外边界上且其重叠层数为1或者分弧段位于雷达顶空盲区区域边界上且其重叠层数为0。即雷达网边界分弧段集合为
Cb={ci∈C|(ci.om=1∩ci.bm=0)
∪(ci.om=0∩ci.bm=1)}
(5)
4 雷达网融合探测包络计算
通过上述雷达威力边界预处理,最终得到组成雷达网整体探测威力的边界的分弧段集合Cb。本节首先建立分弧段连接矩阵来表征Cb中的分弧段的连接关系,再基于分弧段连接矩阵搜索Cb中的分弧段,确定雷达网融合探测包络。
4.1 分弧段连接矩阵
雷达网边界分弧段集合中具有N个弧段,建立一个N×N的矩阵,用于存储Cb中分弧段两两之间的连接关系,矩阵中第i行与第j的元素Mij表示分弧段i与分弧段j之间的连接关系,若Mij为-1,表是对应的分弧段不相连;若对角线元素Mii=0,表示分弧段i与其它分弧段都不相连;若Mij=pij>0,表示对应的分弧段通过交点pij相连。
(6)

4.2 雷达网探测包络边界计算
雷达网整体探测威力的边界由Cb中的分弧段组成,通过分弧段连接矩阵,确定雷达网融合探测包络,算法的基本步骤如下:
搜索过程:依次以连接矩阵每行对应的分弧段为起始分弧段搜索雷达网的威力边界;若该行对应的所有元素都为-1,表示该行对应的分弧段已经被搜索过了,以下一行对应的分弧段开始重新搜索;若该行在对角线上的元素为0,表示该行对应的分弧段为单个雷达的威力边界,该分弧段组成雷达网的一个威力边界,更新矩阵,以下一行对应的分弧段开始重新搜索;否则,以该分弧段为交接弧段,多次搜索接力分弧段,直到接力分弧段满足搜索终止条件。
连接矩阵更新:如果连接矩阵中第i行已经被搜索过了,将连接矩阵中的第i行的所有元素都置为-1,表示第i个分弧段已经被搜索过了。
搜索终止判断:若连接矩阵中第i行为接力分弧段,且连接矩阵中第i行中不为-1的元素对应的列号等于起始分弧段对应的行号,则表示已经搜索到了一个雷达网的威力边界。
接力弧段搜索:若连接矩阵中第i行对应的分弧段为交接分弧段,则将连接矩阵中第i行中不为-1的元素对应的列号对应的分弧段作为接力弧段,并更新连接矩阵,将连接矩阵中第j行对应的分弧段作为新的交接分弧段。
5 实验及结果分析
某雷达网由4部雷达组成,雷达网中各雷达的位置及基本性能参数如表1所示。计算雷达网在各高度层的探测威力包络信息,本文给出了其中35km高度层的仿真结果。

表1 雷达网各雷达信息
雷达网中各个雷达的探测威力如图4所示,雷达网融合探测威力包络如图5所示,由图4可以看出,由于雷达1、雷达2和雷达3的最大俯仰角不为90度,所以雷达1、雷达2和雷达3都存在顶空盲区,其顶空盲区半径分别为12km、6km、20km,在高度为35km时,考虑地球曲率情况下雷达0度仰角最大可探测距离为771km。
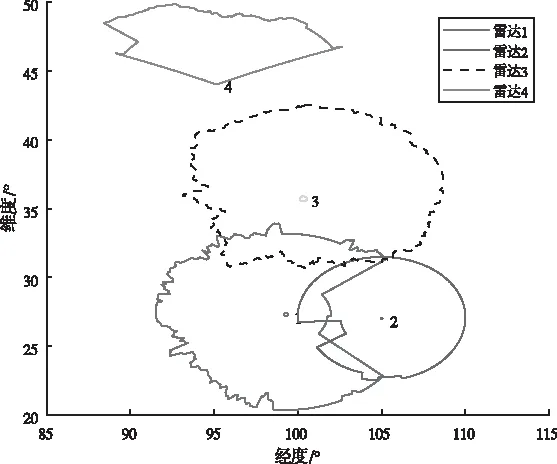
图4 各雷达探测威力

图5 雷达网整体探测包络
由图5可以看出,雷达网存在7个探测威力区域,它们的属性如表2所示,雷达网中雷达4与其它雷达没有相交的覆盖区域,雷达4的探测威力边界组成雷达网的一个探测区域的边界。雷达1,2,3由于存在重合,融合后形成三个雷达最大的探测包络范围1,但雷达1、雷达2和雷达3的顶空盲区未被其它雷达覆盖,由图5看出雷达1与雷达2之间存在地形遮蔽,使得雷达1的探测威力在东边有很大缩减,同时雷达2的探测威力在西边也有缩减,使得雷达1和雷达2之间存在两个雷达都不能覆盖的探测盲区,同样雷达1和雷达3之间也存在类似的盲区,使得雷达探测区域范围2同时存在5个顶空盲区。由表2可得出最终雷达网的探测覆盖面积为3402300km2。

表2 雷达网探测范围属性表
针对该场景,采用文献[8]中的“逐点计算” 算法得到的雷达网整体探测包络如图6所示。该算法只是将各雷达不处于其它雷达范围内的边界点显示来表示雷达网的整体探测包络,但该算法对雷达边界为圆形是较为适用,当考虑地形遮蔽时,雷达的探测边界为不规则多边形,难以确定雷达边界点的连接关系,使得得到的结果不能清楚明了的显示雷达网的威力范围。同时该算法未考虑雷达顶空盲区,使得得到的雷达网整体探测包络不准确。
由于该算法未考虑不同雷达威力边界的交点信息,使得难以确定不同雷达的外包络点之间的连接关系,由图4可以看出,雷达1和雷达2之间存在一块区域不在雷达1和雷达2的覆盖范围内,本文提出的方法能够准确地计算出该区域,即图5中的探测范围1,而采用“逐点计算”算法只能得到图6中的雷达1和雷达2的两个较小的外包络点,不能准确明了得显示该区域。

图6 逐点计算算法得到的雷达网整体探测包络
6 结论
对雷达网融合探测包络进行研究,根据雷达网各雷达的探测能力,判断雷达网内各雷达之间的相互覆盖情况,计算相互覆盖雷达之间的交点,将各雷达区域边界根据交点进行划分,筛选出组成雷达网整体探测范围边界的弧段,搜索确定雷达网的所有探测范围,并计算其属性。实验结果表明,在不改变单个雷达威力参数前提下,依据本文提出的算法能有效地计算出雷达网的探测威力范围,为雷达网布站提供有效地理论依据。