基于STM32的金属管道弱磁信号采集系统设计
2021-11-16郑华林冯一夫潘盛湖
郑华林,冯一夫,潘盛湖
(西南石油大学机电工程学院,四川成都 610500)
金属管道常用于各种环境恶劣地区的原料输送。由于外部环境的影响,金属管道外壁易出现老化或腐蚀现象,使得其服役时长缩短,严重时甚至会出现裂纹或变形,直接导致金属管道无法正常工作。若无法及时、有效地检测出金属管道因环境影响而产生的缺陷并进行维护,则会引发严重的安全事故,例如天然气管道泄漏、油气管道爆炸等。这不仅会导致资源浪费,而且会对自然环境造成严重污染,甚至对人们的生命安全产生巨大威胁。因此,选择一种较为便捷、准确的检测方法对金属管道进行检测是至关重要的。目前,常用的金属管道无损检测方法有超声波检测、射线检测和漏磁检测等。但是,对于不同的检测条件和恶劣的地理环境,有些无损检测方法并不完全适用,例如磁粉检测(magnetic particle testing,MT)在检测前须先对金属管道充磁,检测完再退磁,且磁粉探伤仪器体积大,不便于携带,操作烦琐,从而导致检测工作量大。基于此,周鹤[1]采用磁通门传感器设计了基于μCOS(micro control operation system,微控操作系统)内核的数据采集系统,提高了数据采集的效率和对实时需求的适应性,但因受限于磁通门复杂的三维结构,在实现便携和户外检测方面可能存在一些困难。李坤等[2]采用PC104工控机和DM7520数据采集卡设计了一种在线漏磁信号采集系统,并提出了小波分辨率分析方法,保证了数据的完整性和无损采集,但从设计的角度来看,该系统的搭建成本较高,在性价比方面可能需要进一步优化。陈薇[3]基于脉冲涡流检测技术提出了一种金属管道检测系统的设计方案,实现了对金属管道检测数据的实时提取和分析,但是由于脉冲涡流检测所特有的提离效应,使得检测结果在精度上存在偏差。陆鹏等[4]利用HMC1021磁阻传感器和AT89C2051控制器,实现了对地磁信号的二维采集,但在传感器精度方面须稍作改进,且数据处理模块的设计也有必要进行一定的优化。
为此,笔者以HMC1001、HMC1002磁阻传感器为数据采集探头,以STM32F407芯片为核心控制器,设计了一套弱磁信号采集系统,旨在将高精度的传感器应用于数据采集系统[5],以实现检测工序的简化、降低成本以及三轴磁信号采集和户外检测[6]。
1 弱磁信号采集系统总体设计
1.1 弱磁信号采集原理
选用合适的磁阻传感器,基于铁磁构件在磁场中发生变化的各向异性磁阻效应来对磁信号进行采集。各向异性磁阻效应是指:磁性材料具有的各向异性使得其磁化方向由自身的易磁化轴、形状和磁场方向决定[7]。当外加磁场的方向偏离强磁性材料内部的磁化方向时,强磁性材料的电阻减小,但当外加磁场的方向与强磁性材料内部的磁化方向平行时,其电阻几乎无变化。磁阻传感器的核心元件是惠斯顿电桥,如图1所示。电桥中4个电阻(R1、R2、R3和R4)的初始阻值相等。当电桥的输入电压为Ui且存在外加磁场时,电桥中4个电阻的阻值发生变化,从而导致输出电压Uo改变。在一定范围内,输出电压Uo与被测磁场强度成正比。根据这一原理,可对金属管道的弱磁信号进行采集与分析。

图1 磁阻传感器的信号采集原理Fig.1 Signal acquisition principle of magnetoresistive sensor
1.2 总体方案设计
基于弱磁信号检测技术,设计了弱磁信号采集系统,其主要由供电模块、数据采集模块、数据处理模块和数据分析模块组成,如图2所示。
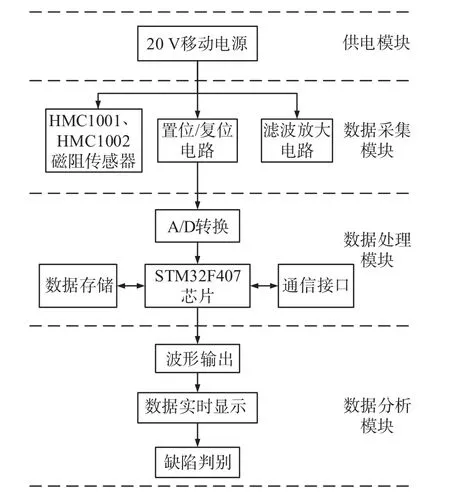
图2 弱磁信号采集系统的总体结构Fig.2 Overall structure of weak magnetic signal acquisition system
弱磁信号采集系统有四大模块。
1)供电模块。基于便携理念,采用20 V的移动电源来供电,方便用于户外的管道检测。
2)数据采集模块。该模块主要用于采集金属管道的弱磁信号并进行滤波放大处理,采集的信号经通信接口传输至数据处理模块。但在传入数据处理模块前,弱磁信号须进行A/D(analog to digital,模数)转换。
3)数据处理模块。该模块主要负责弱磁信号的接收、处理、储存和传输等任务[8],并通过通信接口将储存的数据传输给数据分析模块(即上位机)。
4)数据分析模块。该模块以上位机软件为核心,负责对接收到的弱磁信号进行分析和后处理,并进行缺陷的定量分析。
2 弱磁信号采集系统的硬件设计
2.1 数据采集模块
由于金属管道的磁信号非常微弱,在对弱磁信号进行采集时,须采用高精度的磁阻传感器。本文选用Honeywell公司生产的HMC1001、HMC1002磁阻传感器[9-10],该类传感器可将磁场转换成差分输出电压,并能检测到磁场强度低至3×10-9T的磁场[11],非常适合用于弱磁信号的采集。基于HMC1001、HMC1002磁阻传感器构建三轴数据采集模块,其数据采集方向如图3所示。

图3 三轴数据采集方向示意Fig.3 Schematic diagram of three-axis data acquisition direction
由于采集到的磁信号较为微弱且存在一些干扰信号[12],在数据采集模块中设计了相应的滤波放大电路来对弱磁信号进行有源滤波和放大,以使采集到的信号更为平滑。所设计的滤波放大电路图如图4所示。经过滤波放大处理后的弱磁信号通过RS232接口传输给STM32F407芯片,以进行信号的二次处理。此外,数据采集模块具有置位/复位功能,由STM32F407芯片激发,以保证磁阻传感器的精度和数据采集的准确性[13],对应的电路图如图5所示。
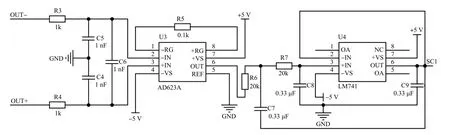
图4 滤波放大电路图Fig.4 Filter and amplifier circuit diagram

图5 置位/复位电路图Fig.5 Set and reset circuit diagram
2.2 数据处理模块
数据处理模块主要包含A/D转换、数据存储和通信三大部分,是整个采集系统的关键模块。在该模块中,STM32F407芯片为核心控制器,它是由意法半导体(ST)公司开发的一种高性能微控制器[14],其最大工作频率为168 MHz,可满足数据处理的多种要求,同时搭配1 GB容量的NAND Flash为存储器,可实现对采集的弱磁信号的临时存储。
模拟信号只有转换为数字信号后才能进行处理。在将存储在数据采集模块中的数据传输至数据处理模块前,须先对滤波放大后的弱磁信号进行A/D转换,然后将转换所得的数字信号传输给STM32F407芯片以进行处理并存储[15],最后通过RS232接口通信的方式将数据实时传输给上位机。数据处理模块的设计框架如图6所示。
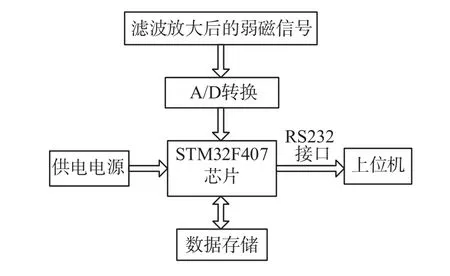
图6 数据处理模块的设计框架Fig.6 Design framework of data processing module
3 弱磁信号采集系统的软件设计
弱磁信号采集系统的软件设计主要包括数据处理模块的程序设计和上位机的软件开发。由于采集的弱磁信号存在一定的干扰且存储量大,须对弱磁信号进行滤波和压缩处理,使得信号在提高抗干扰性的同时减少内存占用空间。经过处理后的弱磁信号通过上位机软件在PC(personal computer,个人计算机)端实时显示。
3.1 滤波模块
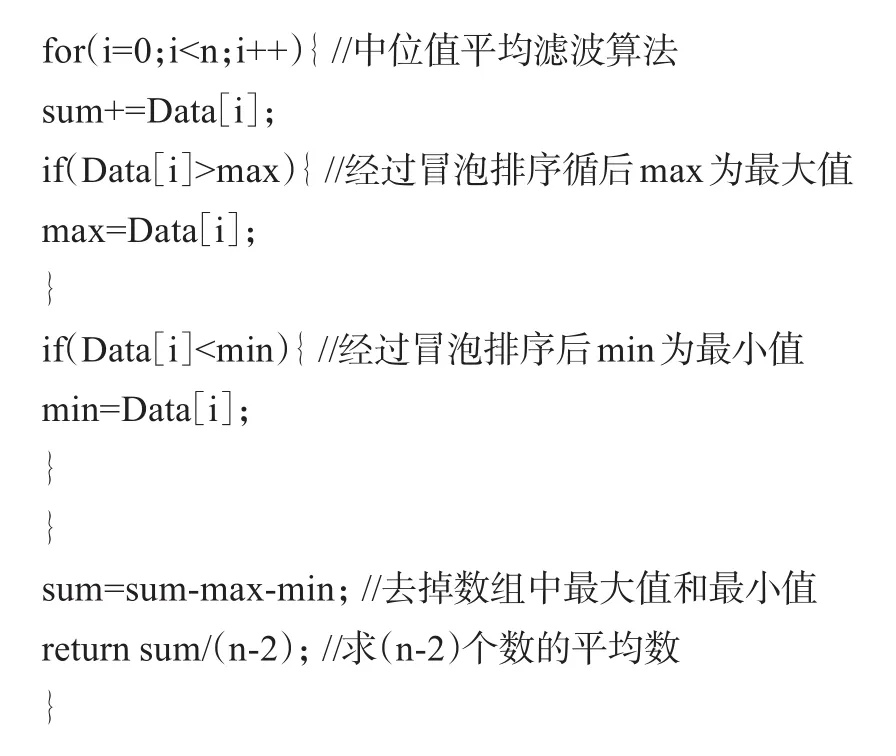
滤波模块主要用于对接收到的弱磁信号进行滤波处理。通过对常用滤波算法的分析[16],本文设计的弱磁信号采集系统采用中位值平均滤波算法(也称防脉冲干扰平均滤波算法)。该算法的核心思想是先对采集到的数据进行冒泡排序,剔除某一数组中数值最大和最小的元素,然后对剩余数据取平均值,并将所得结果作为可用值[17],具体流程如图7所示。

图7 中位值平均滤波算法流程Fig.7 Flow of median average filtering algorithm
本文选取采样次数为20次,这样可以极大程度地避免检测时随机干扰信号对检测结果的影响。采用次数为20次时中位值平均滤波算法的主要程序如下:

3.2 压缩模块
数据压缩是指在不丢失信息的前提下,缩减数据量以减少存储空间[18],从而提高数据的传输、存储和处理效率,或者是按照一定的算法对数据进行重新组织,减少数据的冗余和存储空间。本文设计的采集系统采用LZW(Lempel-Ziv-Welch)压缩算法(即串表压缩算法)来实现弱磁信号的压缩[19],具体流程如图8所示。
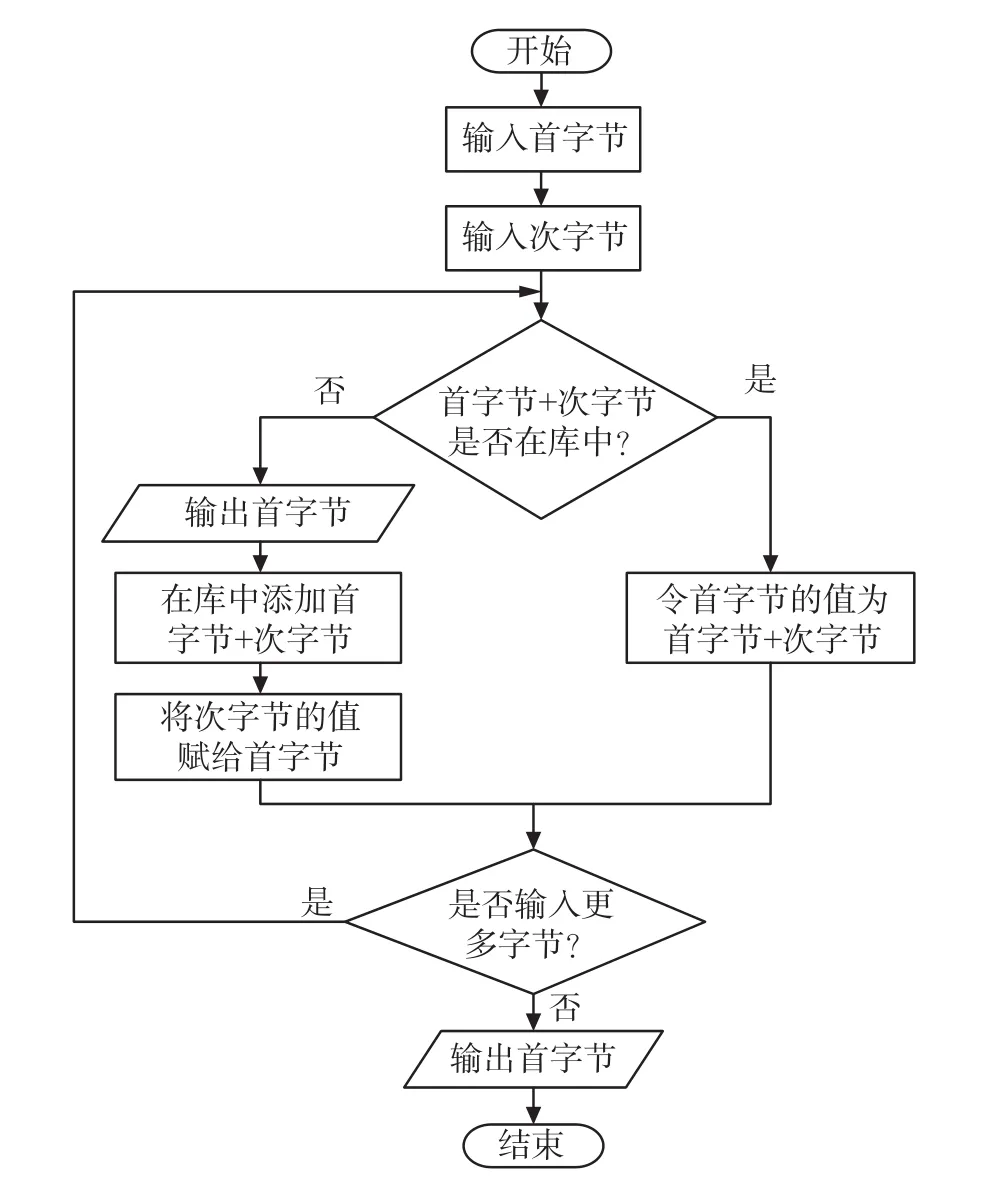
图8 LZW压缩算法流程Fig.8 Flow of LZW compression algorithm
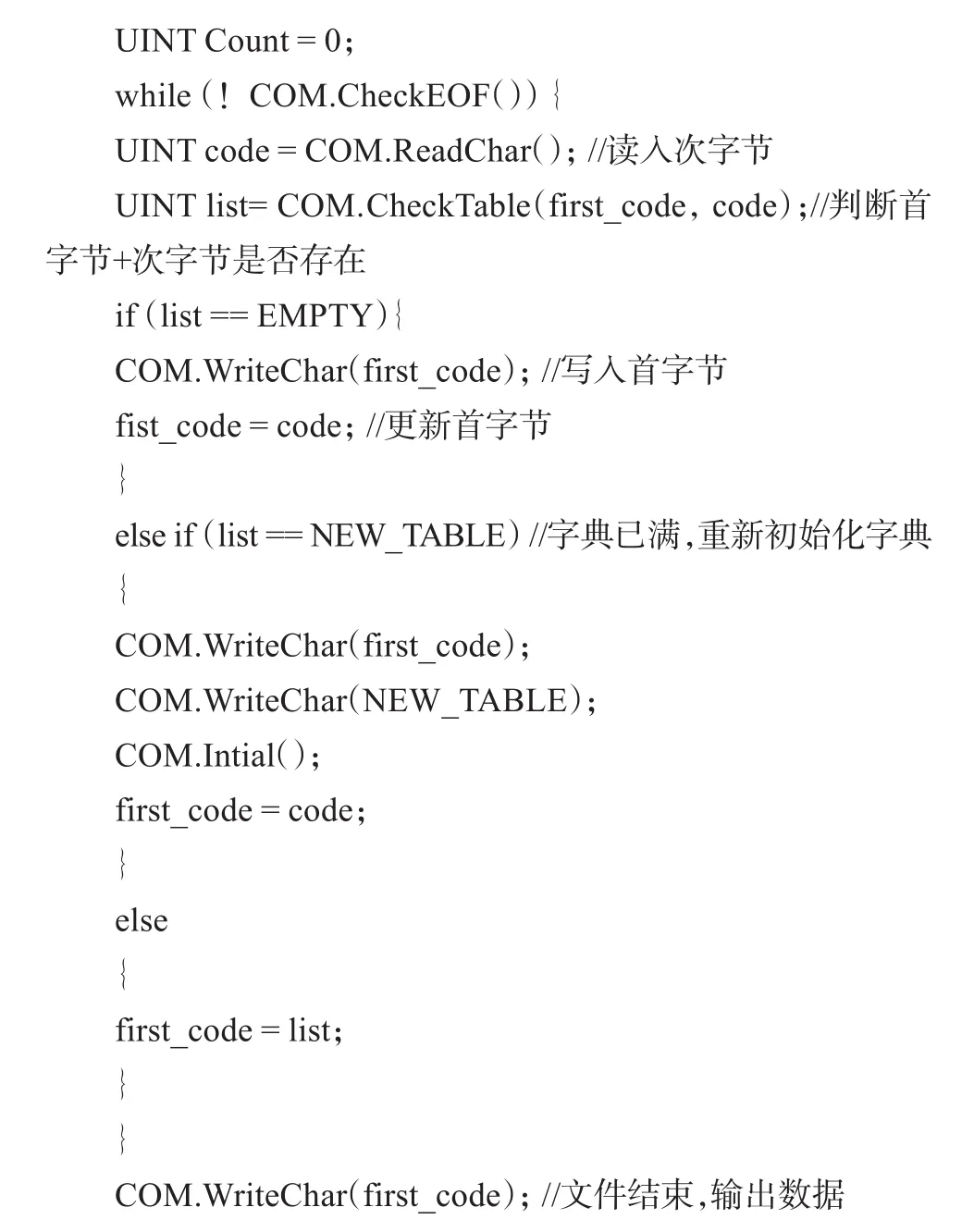
采用动态的字典建立方法[20-21],依次读入原文件的字符序列,每次碰到新的连续字符串时就在字典中加入标示,当下次再遇到相同字符串时,即可用字典索引序号直接代替字符串,写入压缩文件中。LZW压缩算法的主要程序如下:

3.3 上位机软件开发
上位机的软件开发同样采用模块化设计方法。为了让操作人员在现场检测时更方便地操作采集系统并直观地查看数据,须设计一个数据实时显示界面。选用Visual C++软件作为上位机软件的开发平台,通过面向对象编程,调用不同函数完成不同功能,其兼容性良好,可将采集的数据打包为一个.exe文件[22],符合现场检测的要求。数据实时显示界面的开发流程如图9所示。

图9 数据实时显示界面的开发流程Fig.9 Development process of data real-time display interface
4 弱磁信号采集系统功能测试
4.1 测试条件
为了测试所设计的弱磁信号采集系统的性能,选取一根长度为2 000 mm、外径为80 mm、壁厚为10 mm的金属管道进行现场检测。距离金属管道右端744.5 mm处因所受压力过大,出现了轻微凹陷,存在应力集中问题,如图10所示。

图10 现场测试用金属管道Fig.10 Metal pipe for field testing
采用三轴数据采集模块对金属管道的弱磁信号进行采集。首先,确定磁阻传感器的连接是否正确,并检查磁阻传感器与通信接口的传输状态是否正常;然后打开数据实时显示界面,点击“开始采集”,对缺陷管道的弱磁信号进行采集;最后,对采集到的弱磁信号进行存储。在整个采集过程中,磁阻传感器距管道正上方100 mm水平放置(与管道平行),其移动速度保持在0.1 m/s左右。当进行多次检测时,应保证磁阻传感器的初始位置一致。图11所示为金属管道弱磁信号采集现场。

图11 金属管道弱磁信号采集现场Fig.11 Acquisition field of weak magnetic signal of metal pipeline
4.2 测试结果
依据上述流程完成金属管道弱磁信号的采集后,弱磁信号经RS232接口传输给PC端,以波形的形式实时显示,如图12所示。截取金属管道缺陷附近的实时弱磁信号,如表1所示。表中序号为从金属管道右端开始,每隔0.013 m进行编号。

图12 金属管道弱磁信号对应的波形Fig.12 Waveform corresponding to weak magnetic signal of metal pipeline

表1 金属管道缺陷附近的弱磁信号Table 1 Weak magnetic signal near metal pipeline defect
根据俄罗斯动力诊断公司的金属磁记忆检测缺陷判定标准[23-24],当金属管道某一部位存在应力集中缺陷时,X轴的磁信号会出现峰值,而Y轴的磁信号出现过零点。从表1中可以得出,通过检测得到的缺陷位置位于距金属管道右端744.5 mm处,与实际缺陷位置一致,实现了对金属管道缺陷的准确定位。此外,数据实时显示界面显示,经LZW压缩算法处理后的弱磁信号的数据大小由68 752个字节压缩至12 780个字节,压缩率为18.59%,大大节省了存储器的占有空间。
5 结 论
1)金属管道弱磁信号采集系统基于弱磁信号检测技术,以HMC1001、HMC1002磁阻传感器为数据采集探头,以STM32F407芯片为核心控制器,完成了数据采集、数据处理和数据分析的同步操作,并实现了数据的实时显示。
2)将中位值平均滤波算法和LZM压缩算法引入弱磁信号采集系统,实现了在对弱磁信号进行滤波处理的同时对数据进行压缩,不仅提高了信号的抗干扰能力,也节省了存储空间。
3)经过实际调试,弱磁信号采集系统的设计符合预期,可实现户外检测,无需烦琐的工序且能实时检测,改善了现有采集系统简洁性不足的问题,具有实际应用价值。本文采集系统的成功经验可以推广到其他的数据检测系统上。
