扫地机器人触发式液压辅助越障机构的设计
2021-11-16郝为亮潘春荣任艳奎
郝为亮,潘春荣,任艳奎
(江西理工大学机电工程学院,江西赣州 341000)
扫地机器人具有自主清扫、吸尘和拖地等功能,深受消费者青睐,广泛应用于各种生活场所[1-2]。扫地机器人大多在平滑地面上工作,所以基本采用轮式结构。通常采用马达驱动扫地机器人的车轮旋转,实现其移动和转向,并通过拉簧越障机构使其跨越较低的障碍物[3-4]。当遇到台阶、门槛等较高的障碍物时,扫地机器人常常出现无法越障或因动力不足而卡死(仅机器人前端跨过障碍物)等问题,无法继续对地面进行清洁。
对此,很多学者对扫地机器人的越障性能展开了研究。宋玉宏等[5]采用H桥驱动电路控制电机,使扫地机器人在越障时其车轮能够保持较高转速,从而提升了机器人的越障高度,但由此产生的冲击力和噪声也相应增大;刘建宏等[6-7]从变形角度出发,分别将腿式和履带式结构与轮式结构结合,共同装载在扫地机器人中,使机器人通过腿式和履带式结构越障,但这样的扫地机器人的体积较大,无法适用于室内;Yan等[8-10]采用轮式联动机构,使扫地机器人在越障时其车轮产生向上攀爬的动作,越障效果得到改善,但经测试发现,当机器人以倾斜角度越障时会出现无法逾越的死角,且当地面较潮湿时,越障高度提升不明显;冯书鹏等[11]采用扭簧辅助越障机构,通过辅助驱动轮提供额外动力,使扫地机器人具有较强的自适应性,但对拉簧及扭簧的配合要求较高,越障稳定性不强。综上可知,扫地机器人的越障性能有待提升,其结构须进一步优化。
笔者设计了扫地机器人触发式液压辅助越障机构。在拉簧越障机构的基础上,增加了触发模块和液压模块,以有效提升扫地机器人的越障高度,且无须额外驱动即可使机器人在正常行驶和越障模式之间来回切换,减小了控制单元的复杂度。
1 触发式液压辅助越障机构的结构组成和工作原理
扫地机器人触发式液压辅助越障机构的结构组成如图1所示。其主要包括触发模块和液压模块。触发模块具有控制电路开关的作用,决定了液压模块是否运行;液压模块决定了机器人以何种方式越障[12-13]。
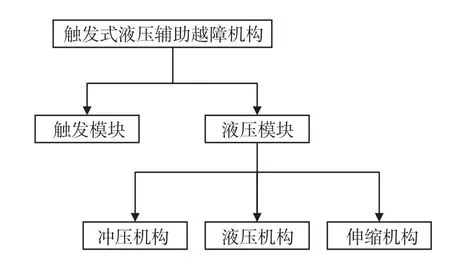
图1 扫地机器人触发式液压辅助越障机构的结构组成Fig.1 Structure composition of trigger hydraulic auxiliary obstacle crossing mechanism of sweeping robot
1.1 触发模块
为保证触发的准确性,方便用户操作,在设计时采用机械结构代替触发传感器。触发模块主要由触发臂、触发轮、扭簧和传动臂组成。触发臂前端贴有橡胶膜,在碰撞时触发轮和橡胶膜可以起到一定的缓冲作用。传动臂上端固定着导电块,触发臂与传动臂之间通过扭簧连接,共同搭载在减速箱外壳上。触发模块的结构如图2虚线框所示。
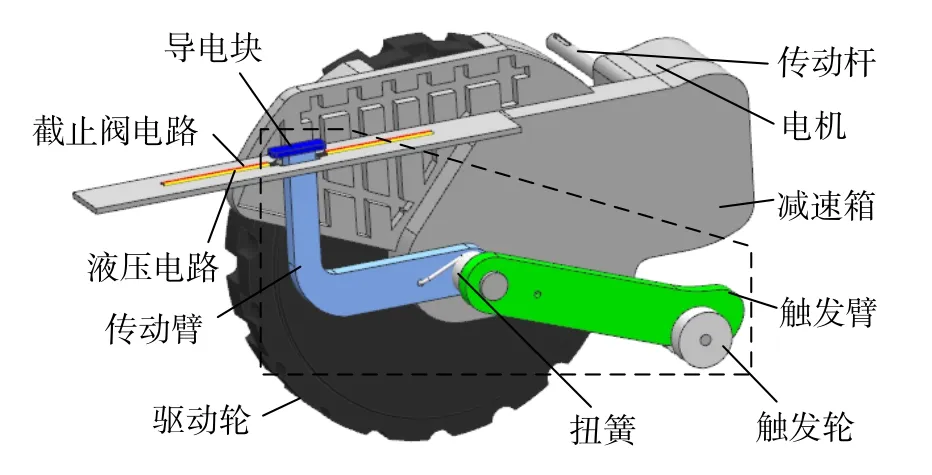
图2 触发模块的结构(虚线框所示)Fig.2 Structure of trigger module(shown in dotted box)
假设障碍物高度为h,装有拉簧越障机构的扫地机器人的极限越障高度为hmax1(受扫地机器人自身重力的影响,一般为15~20 mm),装有触发式液压辅助越障机构的扫地机器人的极限越障高度为hmax2,如图3所示。则触发模块的工作原理为:当h<hmax1时,扫地机器人依靠拉簧越障机构越障;当hmax2≥h≥hmax1时,触发臂在碰撞瞬间被顶起至障碍物表面,旋转一定角度后通过扭簧将扭矩传递给传动臂,传动臂带动导电块下移,从而使液压电路接通,截止阀电路断开。
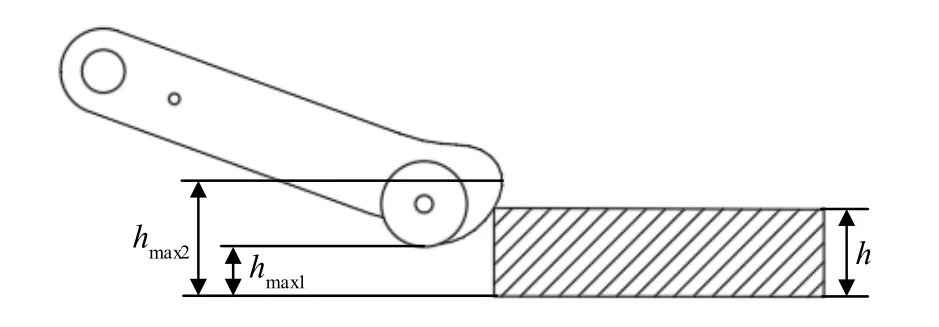
图3 障碍物高度h及机器人极限越障高度hmax1和hmax2示意Fig.3 Schematic of obstacle height h and obstacle crossing height hmax1and hmax2
1.2 液压模块
为了保证扫地机器人的稳定性,减小其越障时与地面作用而产生的冲击,将液压传动与机械传动相结合,设计了液压模块[14]。液压模块由冲压机构、液压机构和伸缩机构组成,如图4所示。冲压机构搭载在减速箱上,与驱动轮共用一个电机;液压机构放置在驱动轮后方,将冲压机构产生的机械能转化为液压能;伸缩机构由液压缸、拉伸弹簧、液压杆和垫片组成,为扫地机器人提供稳定的辅助驱动力。
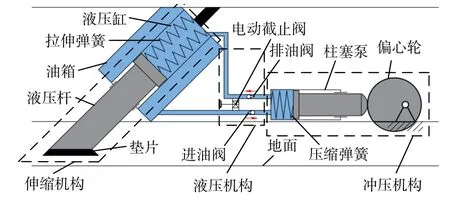
图4 液压模块的结构Fig.4 Structure of hydraulic module
当触发臂被障碍物顶起时,液压电路接通,截止阀电路断开,偏心轮开始旋转,柱塞在压缩弹簧和偏心轮的作用下作左右往复运动。当柱塞向右运动时,柱塞孔和柱塞左端构成的密闭工作油腔的容积增大、压强减小,此时排油阀封住出油口,油箱中的液压油在大气压力的作用下通过进油阀流入工作油腔;当柱塞向左运动时,密闭工作油腔的容积减小、压强增大,此时进油阀封住进油口,工作油腔中的液压油通过排油阀流入液压缸[15]。
偏心轮持续转动,液压油不断地从油箱流入液压缸,液压杆伸出直至接触地面。此时,若液压杆继续伸出,地面会给机器人一个斜向上的反作用力,即辅助驱动力,帮助机器人顺利突破越障临界点[16]。当驱动轮跨越障碍物后,触发臂在重力作用下返回初始位置,导电块上推,液压电路断开,截止阀电路接通,通过拉伸弹簧的作用液压油迅速从液压缸流回油箱,液压杆收回,扫地机器人继续正常行驶,对地面进行清洁。
扫地机器人的越障流程如图5所示。
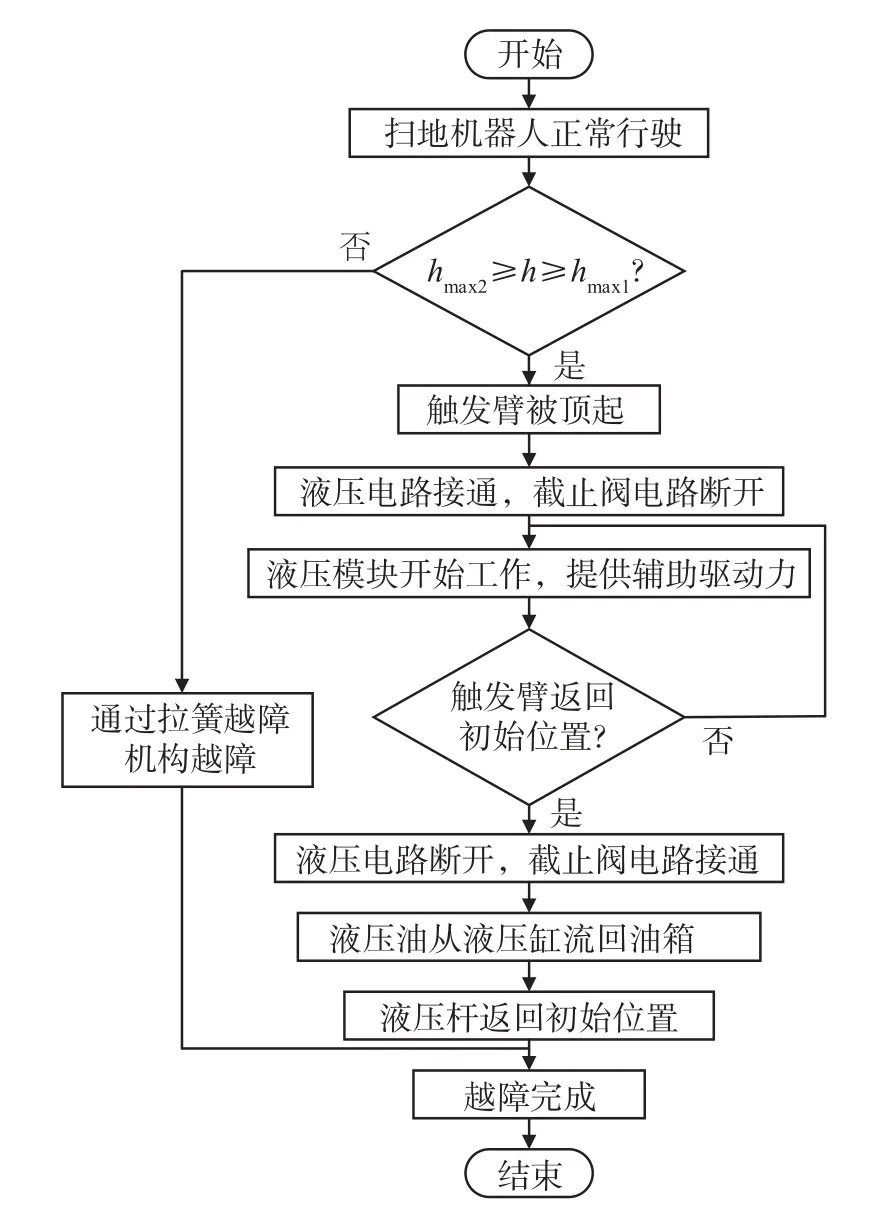
图5 扫地机器人的越障流程Fig.5 Obstacle crossing process of sweeping robot
2 扫地机器人越障动力学分析
根据扫地机器人的实际尺寸,利用UG软件绘制出触发式液压辅助越障机构的三维结构图,如图6所示。
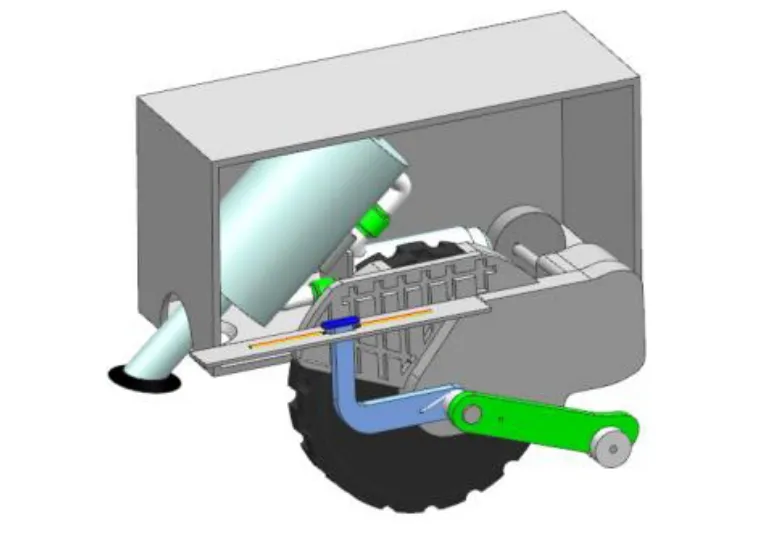
图6 触发式液压辅助越障机构的三维结构图Fig.6 Three-dimensional structure diagram of trigger hydraulic auxiliary obstacle crossing mechanism
2.1 扫地机器人最大倾斜高度分析
扫地机器人的底盘较低,在跨越高障碍物时底盘后端会与地面接触,对越障过程产生干涉。记扫地机器人的最大倾斜高度为hmax3,如图7所示。其中,△ABE∽△ACO2,由三角形相似性质可得:
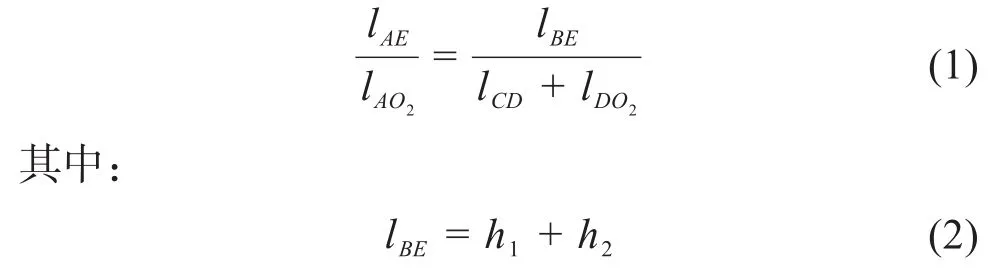
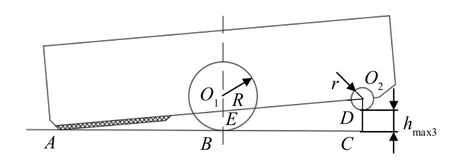
图7 扫地机器人最大倾斜高度示意Fig.7 Schematic of maximum inclination height of sweeping robot
式中:l表示2点之间的距离;h1为扫地机器人在正常行驶状态下底盘与地面的距离;h2为边轮拉簧行程;lCD的值即为hmax3。
式(1)中,除lCD外,其余均为已知参数。为避免扫地机器人在障碍物边缘被卡死,在设计时须保证hmax2>hmax3。
2.2 辅助驱动力分析
触发式液压辅助越障机构设计的关键点在于使伸缩机构提供合适的辅助驱动力[17]。当辅助驱动力过小时,驱动轮无法突破越障临界点;当辅助驱动力过大时,机器人壳体被顶起,驱动轮悬空并停止转动(此为扫地机器人的一种保护机制)。因此须对越障所需的驱动力进行分析和求解。
可将扫地机器人单侧驱动轮触碰到障碍物准备跨越看作刚体定点运动[18-19]。其单轮越障临界点受力如图8所示。
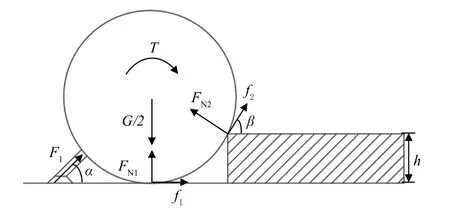
图8 扫地机器人单轮越障临界点受力示意Fig.8 Schematic of force on critical point of single wheel obstacle crossing of sweeping robot
机器人越障所需的辅助驱动力F1作用在液压杆上,受力点可等价为在驱动轮的正上方。力和力矩的平衡方程为:
式中:T为驱动轮转矩;FN1为地面作用于驱动轮的支撑力,FN2为障碍物作用于驱动轮的支撑力;f1为驱动轮与地面之间的摩擦力,f2为驱动轮与障碍物之间的摩擦力,f1=μFN1,f2=μFN2,其中μ为地面的摩擦系数;G为扫地机器人重力;α为液压杆与地面的夹角,β为驱动轮与障碍物接触点的切线与障碍物的夹角;R为驱动轮半径。
代入已知数据,求解方程组(3),即可得到F1值。
液压油的压缩性很小,在通常情况下认为是不可压缩的,故可忽略液压油在管道中的沿程压力损失。假设在液压模块运行前油箱内已充满液压油,则伸缩机构的输出力F2和液压缸伸出速度v的计算公式为:
式中:p为液压油压力;A2为液压杆底面积,A2=πd2/4,其中d为液压杆直径;F3为弹簧拉力,F3=kx,其中k为弹簧弹性系数,x为弹簧拉伸距离;q为流量,q=2n1A1l,其中n1为偏心轮转速,A1为柱塞底面积,l为柱塞有效行程。
给定液压缸的最大负载后,液压油压力越高,液压杆的有效工作面积就越小,液压缸的结构就越紧凑。但随着系统压力的升高,液压元件的性能要求也相应提高。因此,在设计工作压力p和液压杆直径d时,除须保证F2的值略大于F1外,还应根据液压缸材质、密封性及液压杆强度等因素综合考虑。
3 液压杆静力学分析
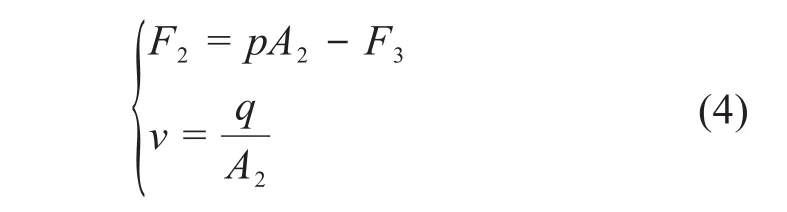
液压杆是扫地机器人在越障过程中主要的受力部件,易发生损坏,因此须重点研究。将其模型导入ANSYS软件中,设置单元类型、实常数和材料属性并划分四面体网格,建立液压杆的有限元模型。设G=50 N(市面上扫地机器人的重力为20~50 N),α=45°,可得F1=71 N。将其作用在液压杆底面,选择输出模式后求解。求解后液压杆的应力和应变分布如图9所示。
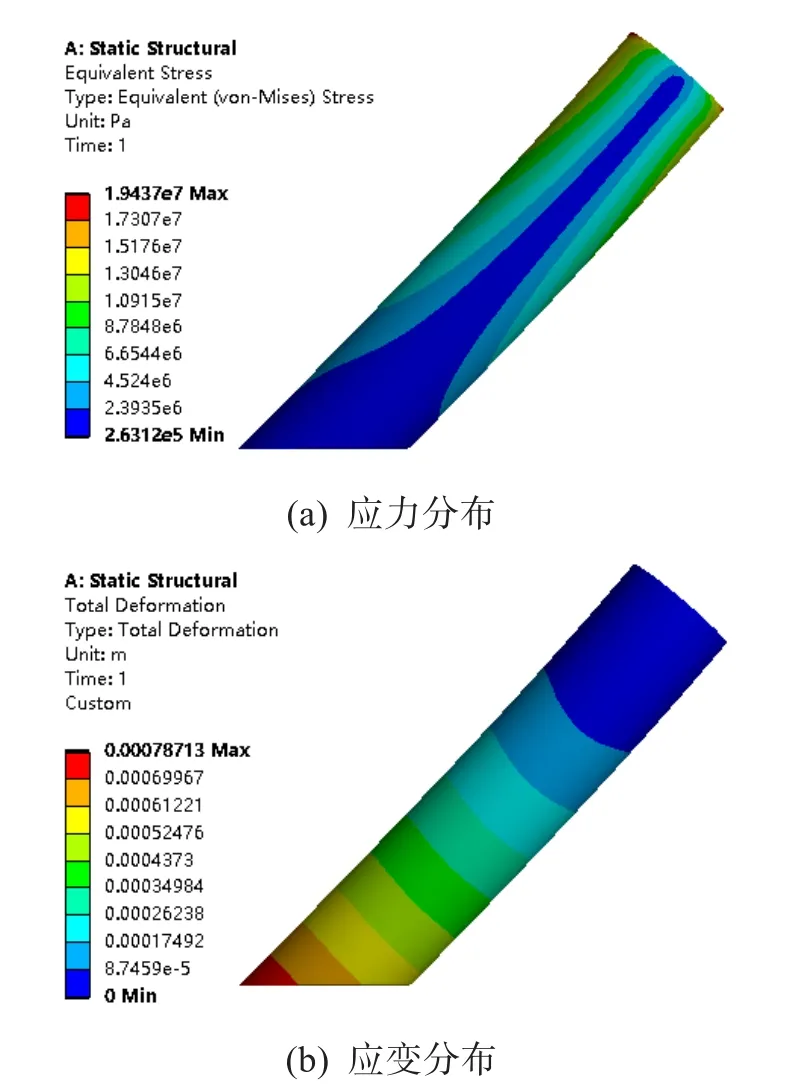
图9 液压杆应力和应变分布Fig.9 Stress and strain distribution of hydraulic rod
由图9(a)可知,在辅助驱动力F1作用下,液压杆的最大等效应力为19.325 MPa。由于PMMA(polymethyl methacrylate,聚甲基丙烯酸甲酯)材料的抗压强度为120~130 MPa,因此液压杆的强度可以得到保证。由图9(b)可知,在此驱动力作用下,液压杆的最大变形位于底端,最大形变量小于1 mm。微小变形对精度要求不高的液压杆影响不大,故液压杆的刚度符合要求。
4 扫地机器人越障仿真
为了验证扫地机器人辅助越障机构的合理性,进行扫地机器人越障仿真。在UG软件中建立扫地机器人三维模型,将辅助越障机构分别置于其左右驱动轮两边,呈对称分布。进入UG运动仿真界面,新建仿真算例,添加约束、重力加速度、摩擦力和驱动等,输入运动参数后求解[20]。扫地机器人越障仿真过程如图10所示。
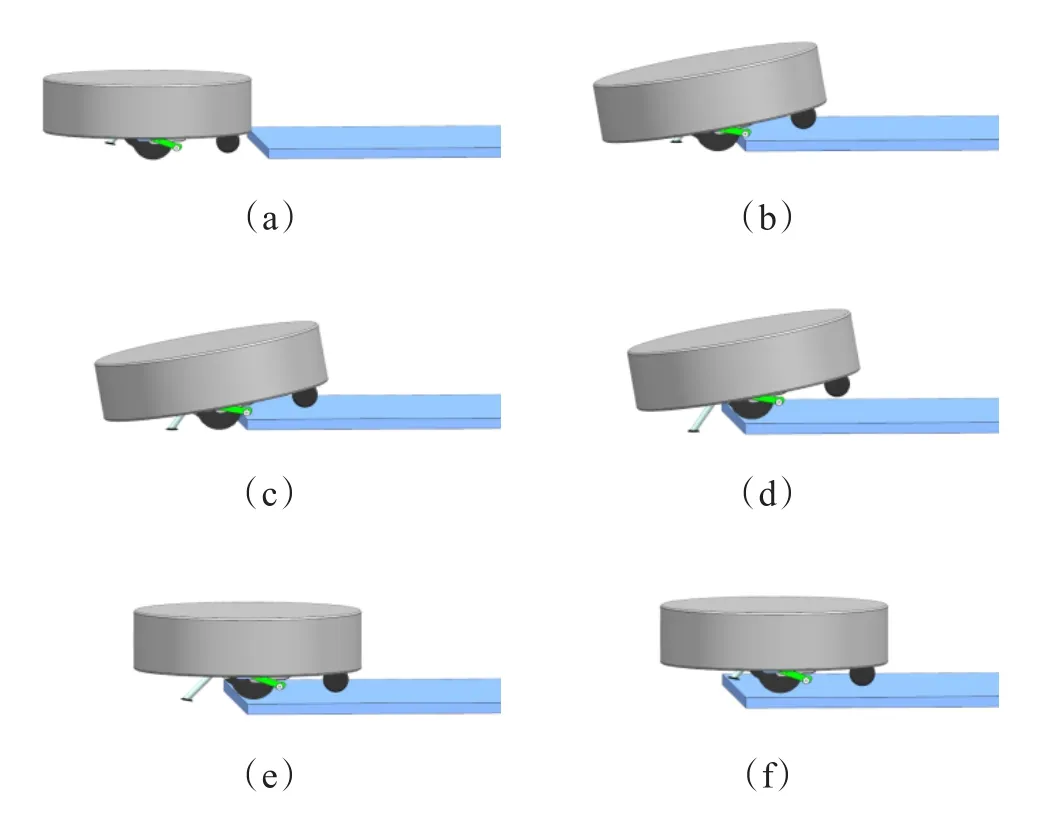
图10 扫地机器人越障仿真过程Fig.10 Obstacle crossing simulation process of sweeping robot
当扫地机器人检测到前方有台阶时,立即减速慢行,如图10(a)所示。机器人前端在驱动轮的推动下越过台阶,继续向前行驶一段距离后,触发臂在碰撞瞬间被顶起,液压模块开始运行,如图10(b)所示。液压杆在油压作用下快速伸出,与地面接触后为驱动轮提供辅助驱动力,如图10(c)所示。机器人左右两驱动轮绕转轴(两驱动轮与台阶接触点的连线)旋转至台阶表面,如图10(d)所示。机器人前端和触发臂在重力作用下返回初始位置,如图10(e)所示。液压电路断开,截止阀电路接通,通过拉伸弹簧的作用液压缸中的液压油流回油箱,液压杆收回并返回初始位置,越障完成,机器人继续正常行驶,如图10(f)所示。
5 实验验证
市面上销售的扫地机器人的内部结构较为紧凑,无法放入触发式液压辅助越障机构。为了保证实验的准确性,按照扫地机器人主流产品的参数设计并制作了机器人样机。通过ADAMS(automatic dynamic analysis of mechanical system,机械系统动力学自动分析)软件分析辅助越障机构的结构参数对扫地机器人越障性能的影响,得到了部分结构参数的最佳取值,如表1所示。
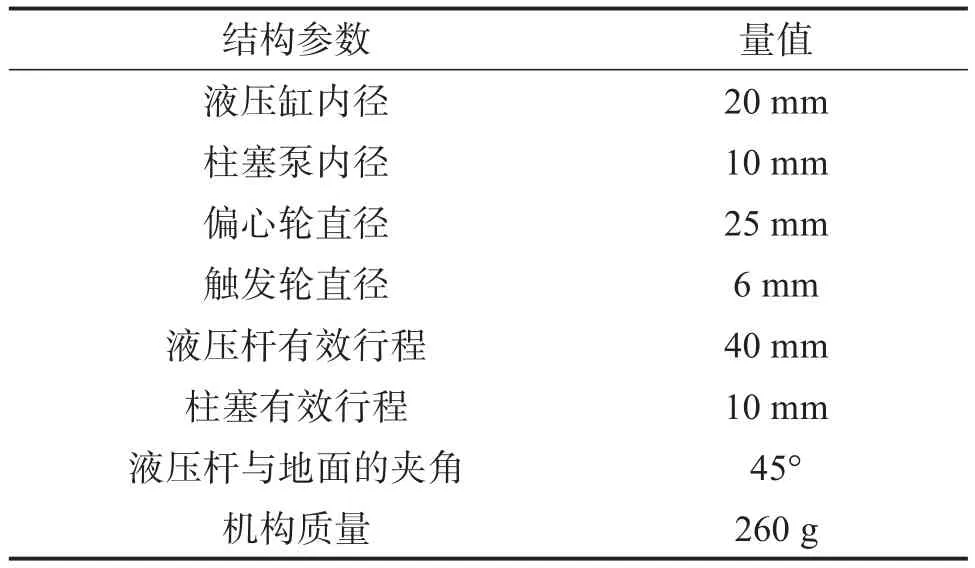
表1 触发式液压辅助越障机构部分结构参数Table 1 Some structural parameters of trigger hydraulic auxiliary obstacle crossing mechanism
采用3D打印技术制作辅助越障机构的部分零件,并与扭簧、液压阀、泵体等进行组装,组装完成后搭载在扫地机器人样机上。触发式液压辅助越障机构实物图如图11所示。选用若干厚度为0.5,1,2,5 mm的亚克力板进行组合,来模拟不同高度的障碍物。
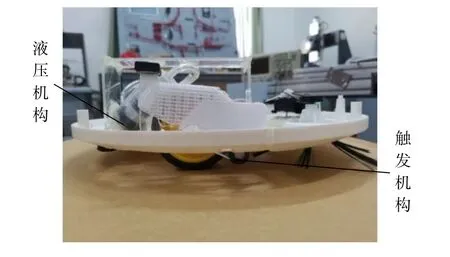
图11 触发式液压辅助越障机构实物图Fig.11 Physical drawing of trigger hydraulic auxiliary obstacle crossing mechanism
地面不同,则其与驱动轮间的动摩擦系数不同,故实验时选择地砖和地板两种地面,分别测试机器人样机在干扫和湿拖两种工作模式下的极限越障高度。扫地机器人在地砖干扫模式下的越障实验如图12所示。为排除地面倾斜的干扰,将机器人样机随机放置在地面,进行5次实验。取实验结果的平均值作为最终结果,如表2所示。

图12 扫地机器人在地砖干扫模式下的越障实验Fig.12 Obstacle crossing experiment of sweeping robot in floor tile dry sweeping mode
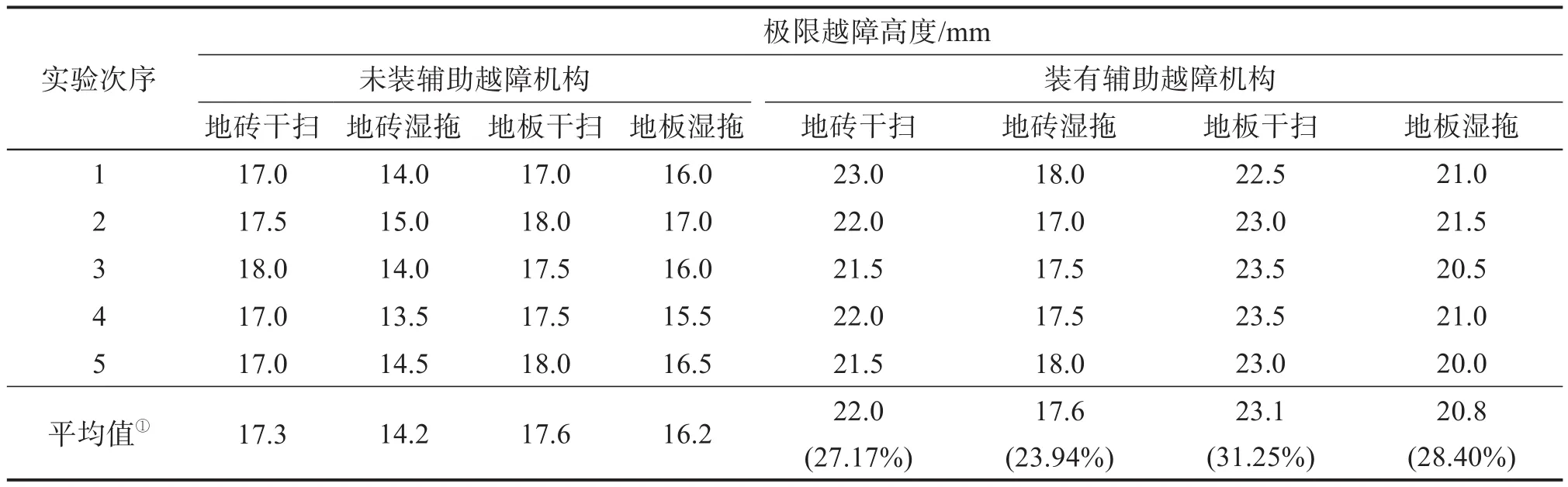
表2 扫地机器人越障实验结果Table 2 Experimental results of obstacle crossing of sweeping robot
从表2可以看出,装有辅助越障机构的扫地机器人在干扫和湿拖两种模式下的越障能力均有较大提升,且地面越粗糙,提升效果越明显。可见,触发式液压辅助越障机构对地砖和地板两种地面均有较好的适应性。
6 结论
针对扫地机器人越障高度较低的问题,设计了一种触发式液压辅助越障机构。根据实际工况对装有辅助越障机构的扫地机器人进行仿真和实验研究,验证了该机构的可行性。
通过研究可得:
1)装有触发式液压辅助越障机构的扫地机器人的越障能力得到明显提升,且对地砖和地板两种地面均有较好的适应性。
2)由于扫地机器人具有一定的高度,在设计时应选用柱塞式液压缸。采用伸缩套筒式液压缸可大大减小辅助越障机构的整体高度,使扫地机器人的结构更为紧凑。
3)采用液压传动与机械传动相结合的方式,保证了机器人越障的稳定性。模块化的设计使得辅助越障机构拆装方便,其经适当改装后即可应用在不同规格的扫地机器人中,具有一定的可推广性。
