基于改进多环虚拟同步发电机微电网控制技术∗
2021-11-13薛晓茹梁文彪王春辉
胡 聪,徐 敏,薛晓茹,宫 政,梁文彪,王春辉
(1.国网安徽省电力有限公司信息通信分公司,安徽 合肥 230000;2.国网安庆供电公司,安徽 安庆 246000;3.南京南瑞信息通信科技有限公司,江苏 南京 210000)
由于具有低成本、灵活和环保的优点,微电网系统已经在能源领域取得了广泛的应用[1]。虽然微电网规模比传统电网小的多,但其功能却比传统电网更加复杂,具体而言,除了需要向本地用电设备供能外,微电网通常还需要通过并网为传统电网提供功率与电压支持[2]。为实现这些功能,作为将直流转换为交流的重要装置,三相逆变器是不可或缺的,其性能的好坏直接影响着微电网发电系统的质量[3-4]。
在微电网系统中,三相逆变器的传统控制方式主要包括有功-无功功率下垂控制和电压-频率下垂控制两种[5-6]。前者以系统功率为控制目标,旨在维持恒定的有功和无功功率输出;后者对功率控制要求比较低,但对电压和频率性能要求很高。传统的下垂控制具有响应速度快的特点,即当负载发生突变后,逆变器输出会迅速跟随负载变化,并引起频率和电压波动。这表明基于下垂控制的三相逆变器无法为系统提供足够的惯量与阻尼以降低负载突变带来的影响,给电网稳定性带来潜在风险[7]。
为增加微电网的惯量与阻尼以提高系统频率稳定性,德国克劳斯塔尔工业大学Beck[8]在2007 年提出了虚拟同步机(Virtual Synchronous Generator,VSG)的概念,利用控制算法模拟真实同步发电机的机械特性方程,使微电网具有了与同步发电机类似的惯量与阻尼特性。VSG 技术的核心是在有功-频率控制中引入同步发电机的二阶转子方程,通过调节转子方程中参数大小,改变虚拟惯量与阻尼值,以调节频率控制环的带宽,降低频率响应速度,提高电能质量。目前,应用最广泛的VSG 技术是由美国伊利诺理工大学钟庆昌[9]提出的电压控制型结构,可直接为微电网提供频率支撑。在此基础上,学者们也在不断改进VSG 控制策略,例如,文献[10]和[11]介绍了基于自适应惯量或阻尼的VSG 技术,根据系统工作特性在线修改虚拟惯量和阻尼值,可在提高系统稳态性能的基础上适时保证系统动态响应;文献[12]和[13]利用VSG 技术实现了高精度功率分配并抑制电网谐波,进一步提高了微电网系统的频率特性。然而值得注意的是,传统的VSG 技术的作用主要是提高系统的频率稳态性能,但电压调节仍采用下垂控制,这导致电压响应并没有得到改善。在应用中,虽然频率会随负载扰动的波动降低,电压波动并不会明显改善。
针对上述问题,本文提出一种含电压二次调节的改进多环VSG 控制策略。参考VSG 技术对频率环带宽的调整过程,可在无功-电压控制中引入带有滞后作用的控制器降低系统带宽,电压响应速度会因此降低,稳态性能提高。本文创新性体现在设计了结合功率和电压的双闭环控制结构,采用了基于PI 原理的电压二次调节控制器,并提出了一种控制器参数设计方法,在负载变化后,抑制了微电网电压波动的同时保证电压偏移量减小。仿真和实验结果证明了该控制策略的可行性与有效性。
1 传统VSG 技术原理
图1 为传统基于VSG 控制的微电网系统框图。图中,Udc为直流分布电源,C为直流母线电容,Ea,Eb,Ec为逆变器输出电压,滤波电感Lf,滤波电容Cf,Rl和Ll分别为传输电缆等效电阻和电感,PCC为公共连接点,Va,b,c,Ia,b,c为三相电压和电流,它们经过锁相环和功率计算后可得到系统实时工作频率f,有功功率P和无功功率Q[6]。VSG 控制包含电压控制和频率控制两部分,其中,电压控制利用Q/V下垂控制器产生参考电压Vf,而频率控制利用f/P下垂控制器,同步发电机机械方程和积分器产生参考相位,即同步电机转子位置角度θ。可以看出,频率控制为双环控制结构,包含有功功率反馈环和频率反馈环,但电压控制仅含有无功功率反馈环。下面对VSG 控制中的各部分进行介绍。
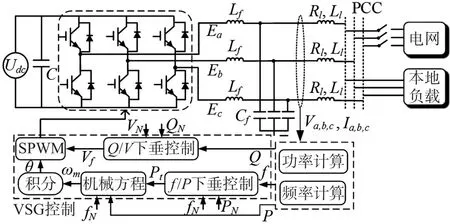
图1 传统基于VSG 控制的微电网结构框图
1.1 频率-有功下垂控制
f/P下垂控制器输入为额定频率和实时反馈频率,输出为机械功率Pt,可实现对微电网频率的一次调节。它是根据同步发电机频率和有功功率之间的下垂关系(如图2 所示)所建立的模块。
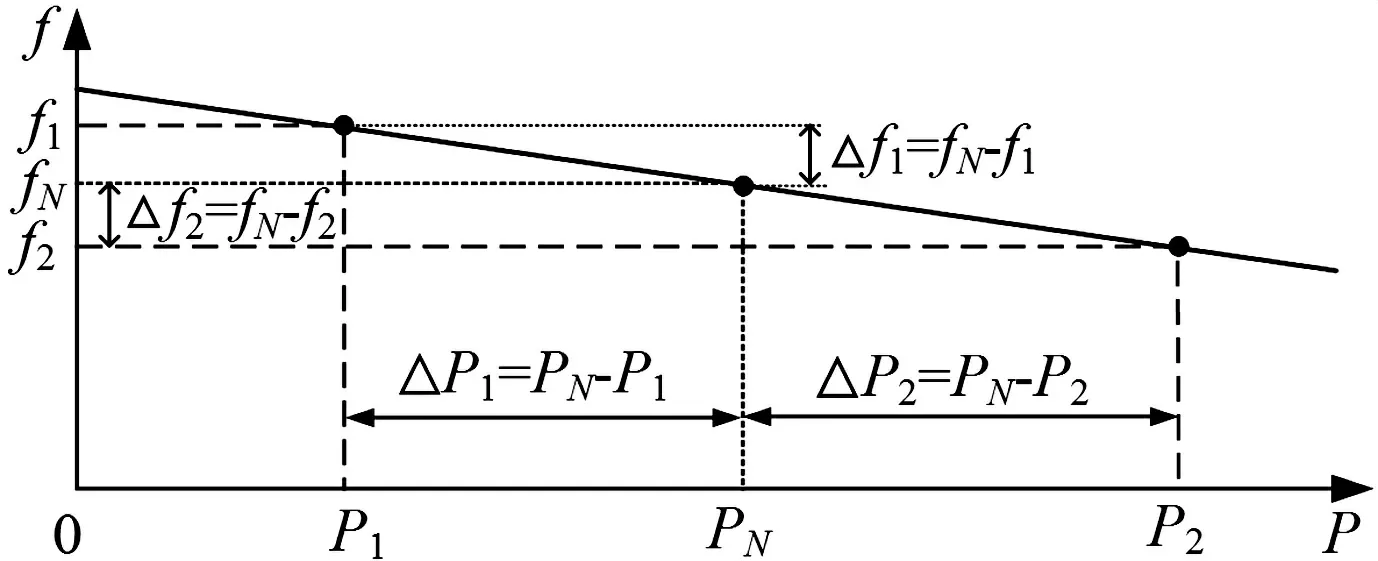
图2 同步发电机频率与有功功率间下垂关系
当系统中有功功率偏离额定值PN时,微电网中的有功功率会随之立马发生改变,当控制逆变器使其输出有功功率与负载重新达到平衡后,逆变器输出频率无法再维持至额定值fN,且当有功功率减小至P1,频率上升至f1,而当有功功率增大至P2时,频率下降至f2。记频率-有功下垂系数kf为:

根据同步发电机频率-有功功率下垂关系可得逆变器输出电压应满足以下关系:

故当检测频率偏离额定值后,同步发电机需要输出的机械功率Pt为:

式中:fN为微电网额定工作频率,PN为额定有功功率。
1.2 机械方程与积分器
同步发电机机械方程被用于频率二次调节,其输入为Pt和P,输出为发电机角频率ω。作为VSG 技术的核心,同步发电机机械方程将赋予微电网控制系统惯量与阻尼特性。同步发电机的机械方程为:

式中:J为虚拟惯量,D为虚拟阻尼。对发电机机械速度积分,可得到用于产生调制波的转子位置角度θ,即:

根据式(3)~式(5)可得频率调节环节结构框图如图3 所示。
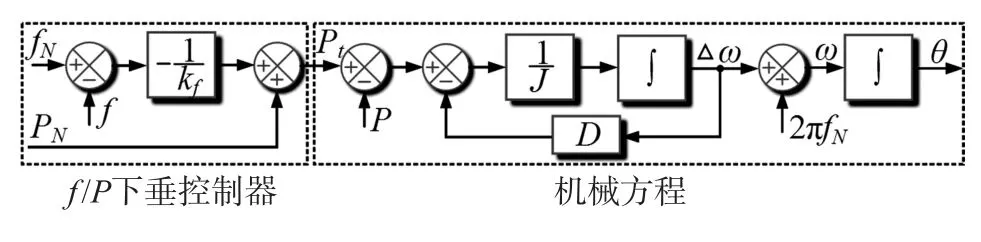
图3 频率调节环节结构框图
1.3 无功-电压下垂控制
Q/V下垂控制器输入为额定无功功率QN和实时反馈无功功率Q,输出为参考电压Vf。与f/P下垂控制一致,Q/V下垂控制器是根据同步发电机无功功率-输出电压之间的下垂关系所建立的。参照式(2),逆变器输出电压与无功功率关系为:

式中:VN为额定电压值,kV为下垂系数,其值为:

根据式(6)可得Q/V下垂控制框图如图4 所示。

图4 Q/V 下垂控制框图
2 改进的多环VSG 控制技术
2.1 多环VSG 结构
图4 中,将VN作为干扰项,下垂控制器的开环传递函数为:

由于下垂控制器为纯比例环节,无法改变系统带宽,电压响应与无功功率变化几乎一致。故对于传统VSG 控制,当系统负载无功功率改变后,电压立即变化,并造成电压持续性波动(稳态性能低)。为降低系统带宽,可将PI 控制器与Q/V下垂控制器级联(如图5 所示)。新型结构中,PI 控制器的输入为Q/V下垂控制器的输出电压Vf1与反馈微电网电压幅值V的误差,PI 控制器的输出为控制用参考电压。与传统的VSG 控制结构不同,图5 中下垂控制与PI 控制构成双环电压调节结构。

图5 基于PI 控制器的多环电压控制结构
2.2 PI 控制器参数设计
考虑逆变器并忽略电网阻尼,建立基于PI 控制器电压调节环节的微电网小信号模型如图6 所示,其中,kp和ki分别为PI 控制器的比例因子和积分因子,K1和K2为常数。

图6 电压调节环节小信号模型
由图6 可以看出,为简化分析,逆变器被等效为比例环节,对于采用正弦脉宽调制(Sine Pulse Width Modulation,SPWM)的逆变器,电压利用率最大为0.866,即K1=0.866[14];由于利用电压计算无功功率的计算延时非常低,也可将其等效为比例环节,令K2=1。则无功功率至输出电压的开环传递函数为:

系统特征方程为:

首先,由于下垂系数kV为负值,式(10)中的常数项和一阶系数都大于0,则对于一阶系统而言,无论kp和ki如何取值,系统最终都可以达到稳定状态;其次,对于PI 控制器而言,kp影响系统的动态性能,为降低电压控制环节响应速度[15],该值应取较小值,而ki取值与稳态性能有关,实际应用中,可固定kp=1×10-3,对于不同的微电网系统,利用试凑法确定ki值,以获取令人满意的电压工作特性。
3 仿真与实验验证
为全面验证本文所提控制方法的有效性,对两个案例分别进行仿真和实验验证。
(1)案例1
案例1 的主要系统参数如表1 所示,在MATLAB/Simulink2018b 中搭建系统模型,仿真过程如下:在0~0.5 s 之间,控制微电网工作在额定状态下,在0.5 s通过施加电容负载的形式突加无功功率至-1 000 VA,比较传统VSG 与改进型VSG、不同积分因子下改进型VSG 的电压控制性能。

表1 仿真用微电网VSG 控制系统参数
图7 为传统VSG 控制的无功功率和电压特性,当无功功率维持在额定点时,无功功率和电压比较稳定,分别维持在0 和220 V 附近;然而,当负载无功功率突变时,电压脉冲产生,脉冲范围为138 V~234 V,再次稳定后,电压均值维持在227 V;值得注意的是,当电容负载施加后,由于下垂控制的快速响应特性,功率和电压波动范围都比较大,其中,电压波动为±1 V,超出了许可电压波动范围。
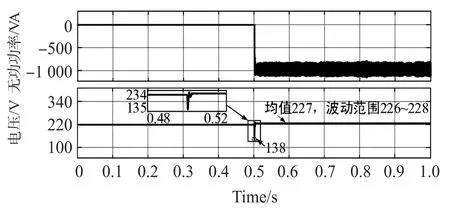
图7 传统VSG 控制性能
图8 为当设置ki值为10 时改进型VSG 的控制性能。与图7 相比,首先,当系统工作在额定状态时,电压仍稳定在220 V;其次,当无功功率突加至-1 000 VA后,功率和电压波动范围大大下降,稳态性能提高,其中电压波动为±0.2 V,已经满足电压波动要求;此外,在功率突变时,电压脉冲区间为139 V~230 V,相比于传统VSG 控制,脉冲幅值已下降。
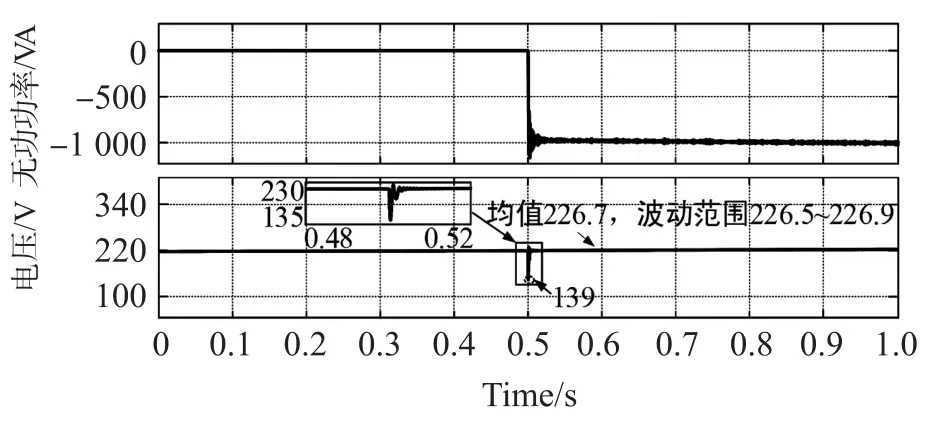
图8 当ki=10 时改进型VSG 控制性能
图9 为当ki值为100 时改进型VSG 的控制性能。可以看出,增大ki后,当无功功率增加后,电压波动进一步降低,约为±0.1 V,然而,此时电压脉冲范围却已经没有明显改变,说明增大ki后,对瞬态性能影响已经比较弱。所以,对验证系统而言,选择ki=10 即可满足性能要求。

图9 当ki=100 时改进型VSG 控制特性
(2)案例2
搭建一套实验用低压测试平台,系统参数如表2所示,传统及改进的VSG 控制算法在TMS320F28335芯片内执行,负载为电阻和电容,测试过程和仿真一致,但突加无功功率为-10 VA。

表2 实验用微电网VSG 控制系统参数
图10 为传统VSG 控制性能曲线,图11 和图12分别为当ki=10 和ki=100 时的改进型VSG 控制性能曲线。当系统工作在额定状态时,所有控制方法都能使功率和电压维持在稳定状态。然而,在施加电容性负载后,系统的工作特性具有明显差别:首先,图10 中无功功率波动比新型VSG 控制大,同时,图10 中电压波动(±5 V)明显高于图11 和图12中电压波动(分别为±3 V 和±2 V),这说明所提出的多环电压控制结构能够提高系统的稳态性能,且随着积分因子增加,系统的稳态性能越好;其次,在突加无功功率的瞬间,图10 和图11 中电压脉冲大小一致,但当ki=100 时,电压波动减小,这说明通过合理设计积分因子的值,可以降低电压偏移量;最后,需要说明的是,当施加电容性负载后,除了无功功率外,有功功率也发生波动,这是由于耦合作用引起的,通过对比可以发现,在该条件下,基于PI 控制器的双环电压控制结构具有抑制有功功率波动的作用。综上所述,对于实验用系统,可采用ki=100 以满足性能要求
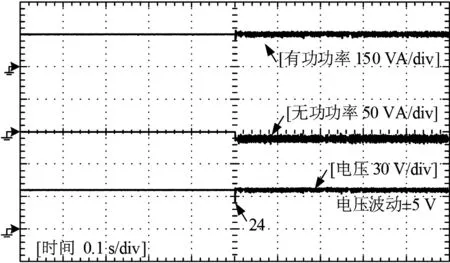
图10 传统VSG 控制特性

图11 当ki=10 时改进VSG 控制特性

图12 当ki=100 时改进VSG 控制特性
4 结论
本文的主要研究内容及贡献总结如下:
(1)本文提出了一种基于PI 控制器的多环VSG 电压控制结构以提高微电网电压稳态性能并降低瞬态电压偏移量,依靠PI 控制器降低电压响应速度,在存在无功功率时,电压波动低,系统稳态性能提高。
(2)理论分析了PI 控制器参数对系统稳定状态的影响,并给出了一种PI 控制器参数的校核方法。仿真和实验验证了所提方法的有效性。
