基于连续点云数据的既有铁路轨面信息快速提取算法设计
2021-11-13梁涛韩峰陈国栋
梁涛,韩峰,陈国栋
(1.兰州交通大学 土木工程学院,甘肃 兰州 730070;2.中铁工程设计咨询集团有限公司 济南设计院,山东 济南 250022)
既有铁路勘测是铁路养护维修及增建二线的重要环节[1]。传统既有线测量多采用接触式测量手段,以钢尺、水平仪、全站仪和RTK等测量仪器为主,存在工作量大、安全性差、上线困难、自动化程度低等不足。尤其近些年铁路大幅提速,相邻区间内天窗时间压缩,传统测量手段的效率已很难满足当前既有线勘测要求。三维激光扫描技术作为非接触式测量手段,是近些年发展较为迅速的一种新型测量技术,相比于传统测量手段,可以提供全面丰富的基础数据,能够全方位地反映铁路沿线的空间状态变化。当前从点云数据源中提取点、线、面等铁路线路参数除了人工手动完成以外,近年来,许多国内外学者都提出了智能处理算法。王洋[2]提出基于多特征通道和自适应检测算子的高速铁路场景分割算法,能够快速有效分割图像得到局部区域精确边界。HUI等[3]提出一种利用偏态平衡、旋转邻域和层次融合优化(SRH)算法从机载激光雷达点云中提取道路中心线的新方法。段晓峰等[4]提出线路点云的专业化处理和数据可视化重构方法,可应用于线路几何形位判别。程智博[5]通过八叉树构建的多级体素结合区域生长方法,有效实现了接触网支柱及支持装置点云的自动提取。HAN等[6]利用三维激光扫描数据通过降维投影转换的方法,实现了隧道断面自动提取。韩峰[7]从轨道动静态检测出发,提出三维激光扫描技术在既有铁路状态检测及评估中的应用,为后续类似研究提供了参考。但整体而言,三维激光扫描技术在既有铁路勘测领域的应用尚不够深入,尤其是基于海量点云数据的既有轨面信息的快速、高效提取算法尚不成熟,算法的精确度和容错性还有待完善。因此,本文提出一种基于连续点云数据的既有铁路轨面信息快速提取算法,依据电气化铁路接触线分割构建铁路缓冲区,先后经过平面格网法对钢轨潜在区域的粗提与多种约束条件下的精提实现了快速、高效化钢轨轨面点准确提取,较好地解决了既有轨面点云信息的快速提取问题。
1 点云数据采集与预处理
此次选用格尔木至敦煌铁路K146+425~K147+375段作为点云数据采集对象,实验路段全长950 m(图1),为国铁Ⅰ级电气化铁路。按照韩峰[7]提供的思路,选用效率更高的沿线路中心线“一”字型布站的方式进行扫描,相邻测站数据采用3个不共线的球形靶标进行配准拼接。

图1 数据采集现场Fig.1 Data collection site
线路点云数据采集过程中,因受仪器固定误差、人员作业水平、现场作业环境等因素影响,不可避免地会出现一些“噪声点”。为了获取正确的点云数据,需要对点云数据预处理,即对噪声点进行“去噪”处理。相关噪声点可在HDScene软件中进行交互式框选剔除,或采用中值滤波或高斯滤波等相关去噪算法进行剔除。
2 点云数据结构组织的建立
扫描后的点云信息往往数据量大,且海量点云数据之间缺乏相应的拓扑关系,离散性强,很难实现点云数据的大范围检索,对计算机内存要求较高。因此,为了实现点云的快速搜索、查询和储存,本文采用k-d树的结构组织方案进行数据检索,以提高点云的搜索效率。
2.1 k-d树简介
k-d树是Bentley于1975年提出的一种空间组织点的数据结构[8],主要用来处理多维数据或多属性数据的检索。k-d树是空间二叉树的一种特殊情况,其中k可以理解为维数,与二叉树不同的是,k-d树可以将数据在k维空间进行划分[9−10],然后在划分后的区间内进行检索。具体构建过程如下:
1)根节点按照所决定的一个维度对数据进行划分,子节点按照所决定的另一个维度进行划分,由此类推,在各个维度之间不断循环。直到子节点中的点数少于设定的最大点数,划分结束。
2)在k-d树中所有的非叶子节点都可以视为一个切分面将数据空间分为上下或左右2个部分。在每次选取的维度上将切分面上的数据点按此维度上的大小进行排序,选择中位数作为切分点,在切分面中位于左边的节点都是左子树,位于右边的节点都是右子树。如图2所示为二维平面时k-d树结构组织。

图2 k-d树结构Fig.2 K-d tree structure
2.2 点云的领域搜索
对于点云集M中的点Pi来说,通常采用欧氏距离定义2点之间的真实距离,n维空间中2点间距离计算公式如式(1)所示。利用k-d树的数据结构搜索领域是树遍历算法的一种,它避免了不必要节点的遍历,提高了搜索效率。

目前,基于k-d树的局部邻域搜索主要有以下2种方法[11]:
1)半径领域搜索(Radius search):以点Pi为中心,设定的r为半径,搜索点集M中与点Pi距离小于r的所有数据点,如图3(a)所示。
2)k领域搜索(Ksearch):搜索点Pi附近的k个数据点,点集M中与点Pi距离最近的k个点称为点Pi的k领域,如图3(b)所示。

图3 局部领域搜索Fig.3 Local areas search
3 铁路缓冲区分割构建
缓冲区是指在地物周围创建一个具有一定宽度的多边形,这个多边形区域就是缓冲区[12]。在铁路中,以路基、道床和轨道为对象都可以创建缓冲区。对于我国的电气化铁路,其接触线到轨道的距离一般在5.3~6.5 m,因此,可以利用接触线和轨道区域的相对位置关系分割构建铁路缓冲区,以降低周边地物的点云干扰。
电气化铁路接触网主要采用链形接触悬挂的形式架设在线路上方。链形接触悬挂主要由接触线、吊弦和承力索等组成[13−14],如图4所示。由于接触线只是接触悬挂的一部分,从线状点云中不能很好地将接触线点云单独提取出来。为此,采用主成分分析法和移动激光点聚类法,实现接触线点云的自动提取。
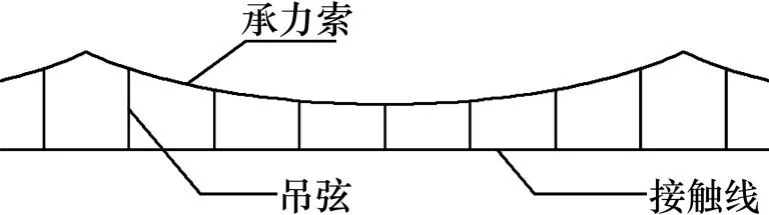
图4 链形悬挂Fig.4 Chain suspension
3.1 主成分分析法
主成分分析法(Principal Component Analysis,PCA)是一种普遍应用于数据分析领域的算法,能够利用少数指标的线形组合表示出数据中的绝大多数信息。
对于点云中任意一点p,都能查询到领域附近的点。以k领域为例,假设M=Pi(xi,yi,zi)|i=1,2,…,k是点p领域k个点的集合,通过这k个领域点构造协方差矩阵C,λj|j=1,2,3为矩阵C的特征值,分别表示p点在3个主方向上的变化程度。由于协方差矩阵为半正定的对称矩阵,可知特征值λj均大于0。下式中vj是相应的特征向量,pˉ为邻域点集的三维质心。


根据特征值的大小(λ1>λ2>λ3)对λj进行排序。如图5所示,当3个特征值近似相等时(λ1≈λ2≈λ3),可认为当前点集具有球状特性,一般表现为球状或体状目标物体。同理,当3个特征值中有2个接近,且远大于第3个特征值时(λ1≈λ2≫λ3),其中λ1和λ2指该点在三维空间中的延伸方向主要有2个,可认为当前点集具有面状特性,一般表现为平面目标物体。当3个特征值中仅有一个较大,另外2个特征值较小且接近时(λ1≫λ2≈λ3),其中λ1指该点在三维空间中的延伸方向主要有一个,可视为当前点具有线状特性,一般表现为线状目标物体。
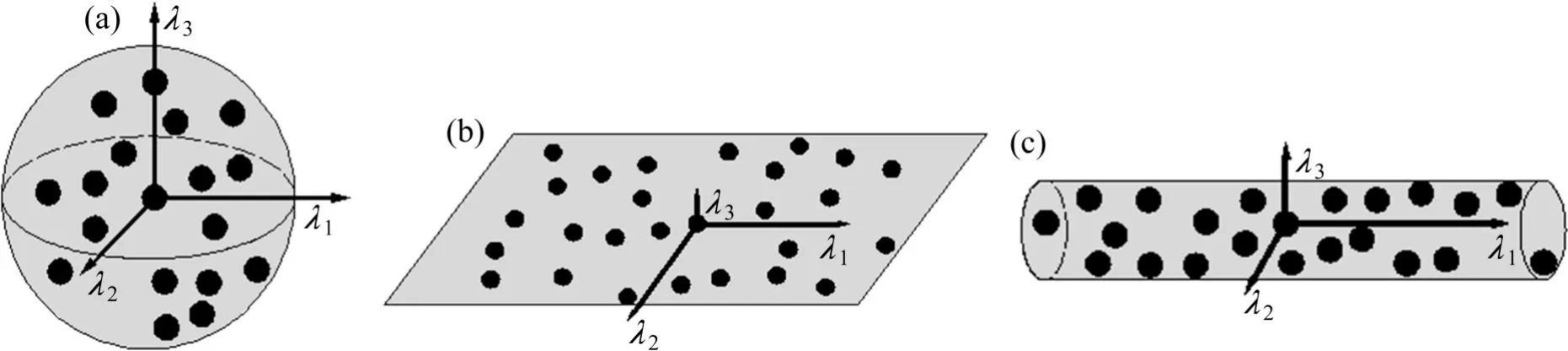
图5 不同目标物体点云的特征值大小关系Fig.5 Relationship between eigenvalues of point clouds of different objects
因此采用主成分分析的方法,根据特征值大小可确定出目标点云的几何属性,进而实现线性结构物点云的筛选。
3.2 线状点云提取
原始点云数据经过预处理后的局部点云如图6所示。取线路水平面为xoy,垂直线路水平面方向为z方向,显然接触线和承力索平行于xoy面,吊弦平行于z方向。因此对于接触线点云的提取,可以根据该点的最大主方向λ1对应的特征向量v1判断其方向,若v1的分量v1z最大,则判断该点为吊弦上的点,可以予以滤除。

图6 预处理后的局部点云Fig.6 Local point cloud after preprocessing
图7展示了基于PCA的空间维度特征提取的接触线、承力索和回流线3线上的线状点云。其中图7(a)是半径邻域法(R=0.1 m)的提取结果,图7(b)是k邻域法(k=50)的提取结果。从图中可以看出,在铁路下部附近区域,半径领域法有较多的误提取点云,相反k领域法取得了较好的效果。这是由于点云密度分布不一,采用半径领域法会产生较大的计算误差。此外,虽然成功滤除了吊弦线点云,但是在吊弦与接触线和承力索的接头位置会不可避免地滤掉少许正确点云,造成了局部线点云的缺失。
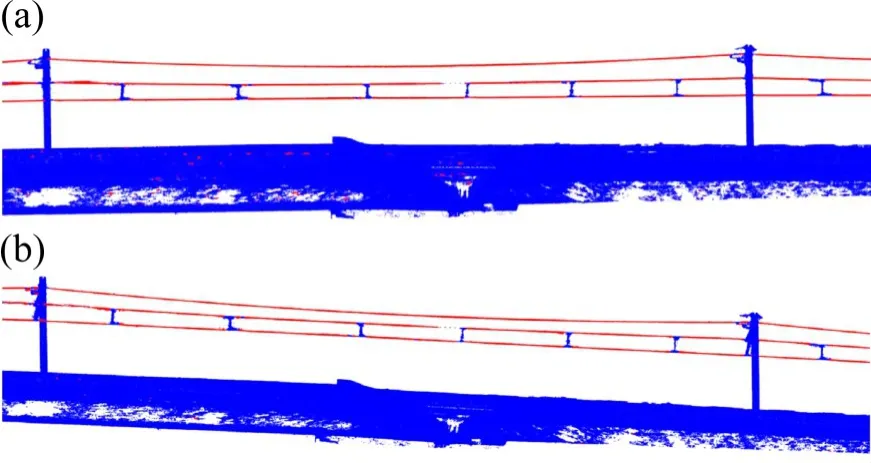
图7 基于PCA空间维度特征的点云提取结果Fig.7 Point cloud extraction results based on PCA spatial dimension features
3.3 接触线提取
对提取的线状点云观察可知,接触线点云与承力索、回流线点云间的距离较大,而与自身的相邻点云距离很近。基于此,采用移动激光点聚类法识别提取接触线上的点云数据。原理如图8所示,接触线上相邻点云间距离记为d,接触线与线A间的距离记为s,L为设定的距离阈值,其值略小于两线间的距离s,取1.05 m。
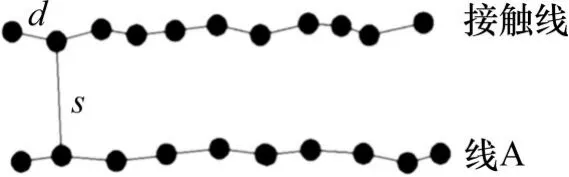
图8 移动激光点聚类法Fig.8 Moving laser point clustering
1)选择接触线上的一点作为起始种子点,为了保证提取后的接触线完整性,尽可能选择端部点作为起始种子点。
2)利用k领域搜索法,寻找并计算种子点附近的k个点与种子点间的距离Di,i=1,2,…,k。

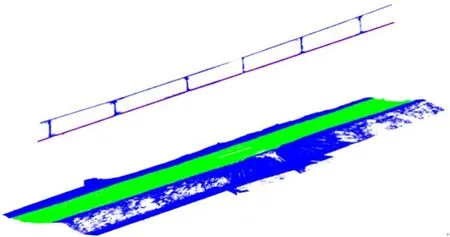
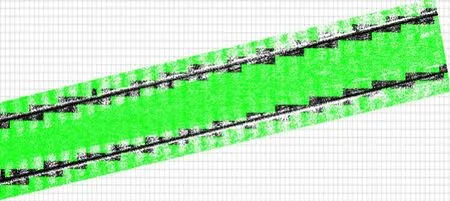
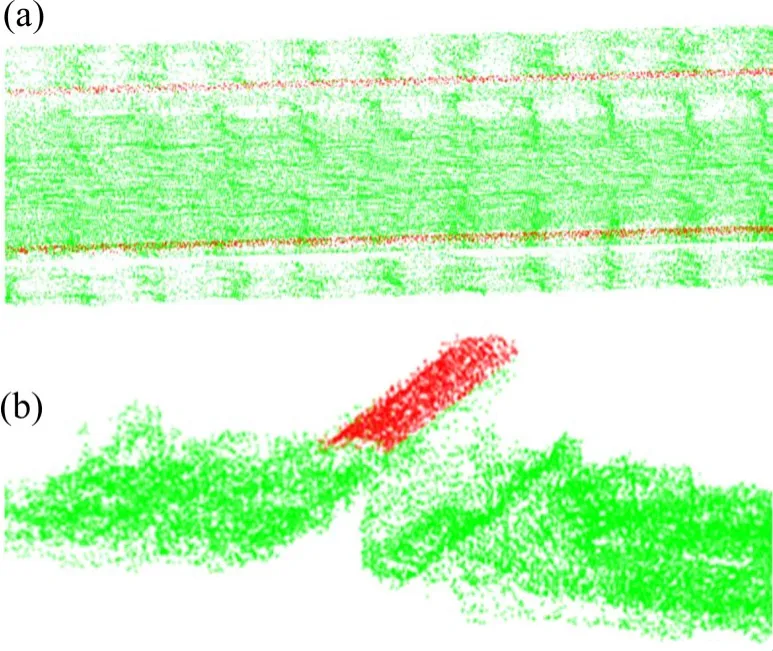
3)在种子点附近的k个领域点中,寻找满足条件Di 4)重复步骤2和步骤3,直至种子点附近的k个点的Di值均大于等于L。 5)聚类结束,输出接触线点云组。 上述聚类的过程中,种子点在接触线上不断移动,自动拾取接触线上的点云。由图7(b)中得到的线状点云数据,经过移动激光点聚类法的提取,其接触线点云如图9中下部线所示。 图9 接触线点云提取结果Fig.9 Contact line point cloud extraction results 利用提取后的接触线点云,首先在水平面上进行投影,然后在投影的左右一定范围内分割构建铁路缓冲区。考虑到投影线与线路中心线可能存在一定的水平距离,结合钢轨尺寸(图10所示),故而取左右宽度各为1.2 m。 图10 钢轨尺寸Fig.10 Rail size 最终分割构建完成的铁路缓冲区位于接触线下方,如图11带状区域所示。 图11 分割构建的铁路缓冲区Fig.11 Construction of railway buffer zone 在构建完成的铁路缓冲区基础上,对于钢轨的轨面点云的提取可分为粗提取和精提取2步。 利用钢轨的高程属性,选用平面格网法在缓冲区内找出钢轨的潜在区域,即为粗提取过程。 假设将整个缓冲区区域平行投影至XOY二维平面内,X轴、Y轴的最大最小值记为Xmax,Xmin,Ymax和Ymin,然后在整个区域内划分U×V个格网,格网间距分别为Xgrid和Ygrid,则有如下关系式: 对于U×V个格网,分别对每个格网内的点集作高程极差分析,得到高程极差值ΔZ(式(7)),再结合钢轨及其附近区域的高程特点利用ΔZ筛选各个格网。设H为轨头顶面至钢轨底部的距离,视高程极差值ΔZ在(3H/4,3H/2)的范围为含有钢轨的潜在格网。 格网间距宜适中,过小会增加点云分析计算时长,过大则会影响后续精提取结果。经过多次试验比对,采用格网间据为20 cm×20 cm,粗提取结果如图12所示,其中深色区域为含有钢轨的潜在格网。在后续精提取的过程中,只需要处理含有钢轨的潜在格网,其余格网可以剔除。这样就可以快速锁定钢轨潜在区域,为后续轨面点的精提取提供区域位置参考,减少精提取所需处理的数据量。 图12 钢轨潜在区域格网提取结果Fig.12 Grid extraction results of potential rail area 利用钢轨的空间几何尺寸和点云反射强度特征,结合多种约束条件提取钢轨轨面点,即为精提取过程。 激光扫描得到的点云数据中,每一个点都包含了三维坐标信息,也就是(x,y,z)3个元素,另外还包含反射强度信息。反射强度作为一种相对值,不仅取决于激光的波长、介质材料以及介质表面的明暗黑白程度,还会受到天气状况的影响,但在一定程度上仍然能反映被测地物的类型,可近似认为同一表面介质的地物反射强度比较接近[15]。对于铁路而言,轨枕和道砟的反射强度较高,而钢轨属于深色金属物品,反射强度较低,如图13所示,因此可通过设置强度阈值筛选钢轨点云。但是反射强度作为一种辅助信息,除此之外,还需结合其他约束条件提取轨面点。 图13 铁路区域反射强度Fig.13 Reflection intensity of railway area 钢轨轨面可视为一个近似水平面,相邻的轨面点具有相似的高程值,所以可以采用高程标准差的概念筛选轨面点。以任意点p为例,其领域内k个点的高程值为h1,h2,…,hk,则高程平均值h和k个点的高程标准差σp如式(8)~(9)所示。高程标准差σp越小,表示领域内各点的高程相似,该领域越平坦,反之说明领域起伏波动大。对于钢轨来说,位于轨面上的点σp较小,而位于钢轨侧面上的点σp较大。 基于以上2个方面,为实现轨面点的精提取,需满足下面几点约束条件: 1)在轨面点领域半径r=0.1 m的范围内需保证其他点的存在; 2)轨面点的反射强度值应≤1 000; 3)轨面点应与所在格网内的高程最大值点高差Δh≤0.1 m; 4)轨面点所在领域的点集高程标准差σp≤0.02 m; 5)与轨面点高差Δh≥0.015 m的近邻点应给予剔除。 提取结果如图14所示,上部点云即为精提取后的轨面点云。 图14 提取的轨面点Fig.14 Extracted rail points 完整度c和准确度p是用于评价轨面点提取精度的2个指标[16−17]。为了实现客观评价,随机选取2段各约5 m的线路点云,将2段铁路点云中手工选取的轨面点作为参考数据并结合算法提取的轨面点,计算上述2个评价指标,其公式定义如下: 式中:TP为正确提取的轨面点数量,即在参考数据和提取数据中都存在的点;FN为未提取的轨面点数量,即在参考数据中而不在提取数据中的点;FP为提取的非轨面点数量,即在提取数据中而不在参考数据中的点。 对提取的轨面点统计分析结果如表1所示,2段线路数据提取的完整度c和准确度p均在93%以上。结果表明,本文提供的方法可以较好地实现既有铁路轨面点云的快速提取。 表1 轨面点云提取精度Table 1 Accuracy of point cloud extraction on rail surface 1)通过建立k-d树的结构组织方案实现了海量点云数据的快速检索,提高了点云搜索效率。 2)提出一种利用主成分分析法和移动激光点聚类法提取铁路接触线的算法,从而分割构建出铁路缓冲区,结合平面格网法的粗提以及多种约束条件下的精提实现了钢轨轨面点的高效提取。 3)既有线现场试验结果表明,提取的完整度c和准确度p均在93%以上,验证了该方法可以完整准确地实现轨面点云的快速提取。 本文提出的轨面信息提取算法未能涉及铁路中复杂区域,如多股相交的道岔区,这将是下一步主要的研究工作。此外,利用本文提取的轨面点云数据可应用于既有线线路整正以及轨面检测研究。
3.4 缓冲区构建

4 轨面信息提取
4.1 平面格网法的钢轨潜在区域提取


4.2 多种约束条件下的轨面点提取


4.3 提取结果评价


5 结论
