基于三维激光扫描技术深圳地铁十号线现状调查
2021-11-08肖佳军
肖佳军
(深圳市水务规划设计院股份有限公司,广东 深圳 518109)
1 引言
地铁是城市重要的交通运输工具,但是地铁运输速度快、运力强,人员较为密集,一旦出现危险,后果不堪设想[1]。但在城市内部,基础设施建设跨越地铁线路的情况较为常见,需要严格控制施工质量,以减轻对地铁工程的影响。但是,在施工前,获取地铁现状,可减少工程施工后的“纠纷”,是十分必要的。随着科学技术的发展,三维激光扫描技术不断发展,在轨道交通、市政道路、边坡岩体等工作中取得了较多的应用[2-6]。多项工程实践工作表明,采用三维激光扫描技术具备精度高、数据处理简便等优势。深圳市城市化程度高,地铁里程名列前茅。在基础设施建设过程中,经常遇到穿越地铁线路的情况。结合五和河左支污水干支管网跨越地铁10号线工程,对三维激光扫描技术在地铁现状调查中的应用进行研究。
2 工程概况及设备参数
2.1 工程概况
五和河左支污水干支管网完善工程横跨地铁10 号线,施工区域为W33~W42 污水设计管段。监测地铁隧道里程左线桩号DK14+250~DK14+674,总长424 m;右线桩号DK14+250~DK14+588,总长338 m。
为确保地铁隧道结构安全,在顶管施工前,需进行地铁隧道结构现状调查、隧道三维激光扫描等。三维激光扫描长度:左线460 m(DK14+235~DK14+695),右线355 m(DK14+240~DK14+595),共计815m。
2.2 扫描设备
本次扫描采用法国FAROS350 三维移动扫描设备,FARS350 设备具体参数见表1。

表1 FAROS350 设备参数

图1 项目位置示意图
3 三维激光点云外业数据采集
3.1 仪器摆放与设置
把脚架调到最高,把仪器从仪器箱里取出,然后放在脚架的接口处并拧紧制动开关。仪器要放在轨道中间,确定放置平稳后打开仪器开关,一般开机需要1 min~2 min 的时间;当开机完成后,新建项目文件,文件命名为项目开始时间数字(年+月+日),扫描模式设置为室内10 m 以外,平均点间距设置为0.77 cm,扫描时间5 分20 秒。
3.2 标靶的摆设
标靶分为特制球形标志(也称标靶球)和棱镜球。放置标靶球时必须注意:标靶球与扫描仪器的距离控制在8 m~10 m 以内,标靶球摆成三角形;如果侧边标靶球无法摆放,则将球放置地面,不能放成等边三角形;标靶球不能被物体遮挡;不能将标靶放在一条直线上;否则会降低拼接精度;安放位置要确保稳定。
3.3 测站设置
每站扫描结束后,在扫描仪液晶屏上浏览点云快速视图,查阅各标靶球是否清晰可见,对于看不清楚的标靶球,必须选择删除当前测站,并重新扫描本测站。

图2 现场观测示意图
4 数据处理及结果分析
4.1 数据预处理
内业数据处理采用的是FARO 自带的处理软件SCENE,见图3。通过标靶球将相邻两个扫描站的数据进行拼接,相邻两个扫描站的点云拼接精度一般在2 mm 左右。

图3 SCENE 软件处理
左线、右线这两段地铁扫描点云见图4。
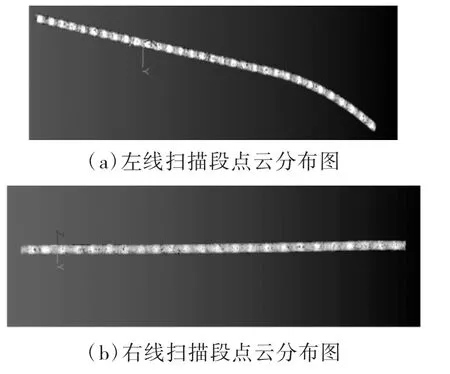
图4 点云分布图
4.2 断面提取
考虑到站台段扫描段和通道段扫描段的头尾两端的点云密度较为稀疏,因此在提取断面时,需要从首尾架站处的点云开始截取断面。具体断面提取过程如下:
(1)通过3DReshaper 软件去除隧道中的噪声点,然后通过软件及人工处理的方式删除非隧道的点云,见图5。

图5 原始隧道点云与去除噪声点后的点云
(2)隧道中轴线的提取包括两个步骤,一是计算隧道整体的全局辅助线,通过人工方式进行绘制;二是借助于全局辅助线,通过软件自动拟合出一条最佳的隧道中轴线,见图6。

图6 隧道点云的中轴线提取
(3)根据《城市轨道交通工程测量规范》规定:线路直线、曲线段每6m 和5m 测设一个横断面。本项目依据提取的中轴线,每隔5m 提取一个断面。断面与中轴线的交点即为断面的中点,见图7。

图7 断面与中轴线提取
4.3 扫描结果分析
提取各扫描段的断面及其中心点后,对各扫描段的中心高度值、最大水平宽度值、顶点高度值进行统计。
4.3.1 左线扫描分析
依据三维激光扫描数据,将左线各断面的中心高度值、水平最大宽度值、顶点高度值,由起点位置开始依次序绘制成图8,以便直观的判别各参数在隧道中的变化情况。左线隧道中心高度值在2.1 m~2.3 m 之间,整体稍有起伏;水平最大宽度值为5.4 m,沿线变化不大;顶点高度值在4.6 m~4.8 m 之间,整体较为平缓,变化较小。


图8 左线三维激光扫描数据
4.3.2 右线扫描分析
依据三维激光扫描数据,将右线各断面的中心高度值、水平最大宽度值、顶点高度值绘制成图9,以便直观地判别在隧道的变化情况。


图9 右线三维激光扫描数据
右线隧道中心高度值在2.1 m~2.3 m 之间,整体稍有起伏;水平最大宽度值为5.4 m,沿线变化不大;顶点高度值在4.7 m左右,整体较为平缓,变化较小。
4.4 三维激光扫描精度检查
1)SCENE 软件点云拼接精度检查,检查结果表明:相邻站拼接误差为2 mm 左右,误差在规范允许的范围以内。
2)随机选取5 个断面,使用测距仪对水平最大宽度值,顶点高度值量取,每个值量取2 次,取平均值作为该检查值,与三维激光扫描原测值进行比对分析。经比对计算,边长最大差值为0.3 cm,说明断面测量成果合格,三维激光扫描精度满足精度要求。
隧道现状调查利用三维激光扫描仪及人工调研形式进行,在地铁隧道左线记录到13 个部位病害影响资料,右线记录到13 个部位病害影像资料。
5 结论
为了获取地铁10 号线现状,利用架站式三维激光扫描仪获取地铁隧道中的点云数据,点云测距精度为毫米级。借助于标靶球对各相邻扫描站之间的拼接精度为毫米级。使用FARO自带的点云处理软件,对点云每隔5 m 提取一个断面,从而获取了整个扫描区域的轮廓形态,数据成果满足相关要求。三维激光扫描结果表明:深圳地铁10 号线调查段整体情况良好,部分区域存在修补、湿迹等病害现象。

图10 部分病害影像资料
