融合侧倾稳定性的智能客车轨迹跟踪增益调度控制策略
2021-11-06王万琼聂枝根
王万琼,陈 峥,聂枝根
(昆明理工大学 交通工程学院,云南 昆明 650500)
0 引言
近年来,中国汽车保有量增长迅速,2020年全国汽车保有量达到2.81亿辆[1].同时,随着道路设施条件改善,汽车运行速度高,加之汽车数量庞大,造成汽车安全事故频发.2016年,中国交通事故造成63 093人死亡、226 430人受伤,直接财产损失12.1亿元[2].He等[3]和Aarts等[4]认为驾驶员因素造成的事故占所有交通事故占比为93%.因此,采用智能驾驶控制技术辅助驾驶员驾驶汽车,甚至完全替代驾驶员操纵汽车,将是降低汽车事故最为有效的方式之一.由于客车具有车身长、质心高且载员大等特性,易发生侧翻事故,引起巨大的人员伤亡,形成重、特大交通事故[5].鉴于此,用于城市间长距离客运运输的智能客车研究越来越受到政府、社会和科研院所关注.
在智能汽车轨迹跟踪方面,Yu等[6]考虑参数不确定性,以及期望横摆角速度和执行器的约束,采用分层控制方式,提出了鲁棒轨迹跟踪控制器,实现了平稳良好地跟踪参考轨迹;Cui等[7]基于多约束模型预测控制(MMPC)方法,提出了智能车辆轨迹跟踪控制策略,实现了智能车辆高速轨迹良好地跟踪控制;Ren等[8]针对自主驱动电动汽车,提出了一种包含非线性预测跟踪、横向稳定性和最优力矩三种控制器结合的路径跟踪控制框架,实现了不同道路条件轨迹良好地跟踪;Lin等[9]综合考虑前轮转角、侧偏角、轮胎侧偏角、横摆角速度等因素,提出了一种模型预测控制与模糊PID控制相结合的轨迹控制方法,实现了参考轨迹平滑良好地跟踪控制;Ahmad等[10]基于模型预测控制算法,采用自动转向系统,提出了智能车辆轨迹跟踪控制策略,实现了良好轨迹跟踪.以上研究主要针对智能乘用车,而较少针对智能客车.
在融合稳定性的智能汽车轨迹跟踪方面,Cao等[11]考虑控制量输入、输入速率和滑移率的时变饱和,基于前馈-反馈补偿控制方法,采用了补偿模型预测控制方法,提出了智能汽车轨迹跟踪控制策略,实现了良好智能汽车轨迹跟踪控制性能,并保持了轨迹跟踪过程智能汽车横摆稳定性;Hang等[12]采用前馈控制与反馈相结合控制方法,提出了智能四轮独立电动汽车路径跟踪控制算法,获得了复杂工况的良好轨迹跟踪,并保持了轨迹跟踪智能汽车稳定性,但以上研究较少考虑智能汽车侧倾稳定性.
在考虑速度变化的智能汽车轨迹跟踪方面,Xiang等[13]提出了转向系统与直接横摆力矩控制相协调的四轮独立驱动车辆轨迹跟踪控制策略,实现了轨迹跟踪和车辆稳定性多目标协调控制;Ahn等[14]提出了集成智能驾驶和底盘控制的轨迹跟踪控制策略,提高了智能车辆轨迹跟踪能力和车辆稳定性;Chen等[15]考虑车辆物理极限约束,提出了基于模型预测控制的智能车辆路径跟踪方法,实现了高速智能车辆横向和纵向位置良好地跟踪;Li等[16]基于横向加速度和偏航角速度约束,提出智能汽车避障轨迹跟踪控制策略,并优化控制策略控制权重系数,实现了避障参考轨迹和参考速度平稳地跟踪.但以上研究较多假设纵向速度不变,而对速度动态变化的智能车辆轨迹跟踪控制研究较少.
综上所述,目前智能汽车研究多集中在乘用车,而较少关注客车,但客车因载客多且质心高等特性,智能驾驶意义更大.同时,上述研究较少进行智能驾驶过程中的侧倾控制,而智能客车需要考虑更多侧倾稳定性;较少研究不同速度的智能客车轨迹跟踪控制,而智能客车可能在不同速度下轨迹跟踪,并且如果在轨迹跟踪过程中采用了制动,车速将时刻动态摄动.针对上述不足,本文在既有研究基础上,针对客车车身长、质心高且载员多等,易造成客车发生侧翻事故的特性,提出融合侧倾稳定性的客车轨迹跟踪增益调度控制策略;同时,采用线性变参数的增益调度方法,以实现不同速度和速度摄动的智能客车轨迹跟踪控制.
1 三自由度简化模型
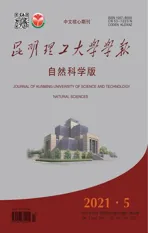
根据智能客车轨迹跟踪侧向运动、位姿和稳定性控制策略的需要,采用智能客车三自由度简化模型,其简化模型示意如图1所示.简化模型三自由度分别为侧向、横摆和侧倾运动,为智能客车轨迹跟踪的侧向位移、位姿和横摆侧倾稳定性控制提供了控制参考模型[17].建立此简化模型,进行了如下假设:(1)模型以方向盘转角作为输入,前轮转角由方向盘转角除以转向系统传动比得到;(2)假设智能车辆行驶在平坦路面;(3)不考虑智能车辆俯仰运动.
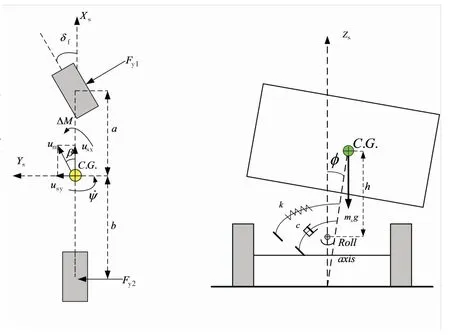
图1 三自由度智能客车简化模型Fig.1 3-DOF simplified model of intelligent bus

式(1)~式(3)中:Fy1为前轴侧向力;ks为侧倾刚度;m为车辆质量;Fy2为后轴侧向力;Izz为横摆转动惯量;δf为前轴转角;a为质心到前轴距离;usx为车辆坐标下纵向速度;cs为侧倾阻尼;分别为质心角速度、横摆角速度和角加速度、侧倾角、角速度和角加速度;Ixz为横摆侧倾转动惯量;ms簧载质量;h为侧倾高度;b为质心到后轴距离;Ixeq为侧倾转动惯量.
轮胎模型:

式(4)~式(5)中:β为质心侧偏角,k1为前轴侧偏刚度,k2为后轴侧偏刚度.
2 轨迹跟踪控制策略
在既有研究基础上,以客车为对象,融合智能客车侧倾稳定性,提出了智能客车轨迹跟踪控制策略,控制策略框图详见图2.此客车轨迹跟踪控制策略同时关注轨迹跟踪、车辆稳定性和控制策略实时性三个目标.由图2可知,控制策略首先建立了包含轨迹参考值和车辆稳定性的轨迹跟踪控制策略的增强型状态空间,此增强型状态空间包含状态方程和输出方程;然后基于LQR控制算法,采用基于线性变参数模型的增益调度控制方式,构建了融合侧倾稳定性的智能客车轨迹跟踪控制策略;最后利用控制策略决策的控制量,实现对智能客车轨迹跟踪控制,并保持轨迹跟踪过程的智能客车侧倾稳定性.

图2 智能客车轨迹跟踪控制策略框图Fig.2 Block diagram of trajectory tracking control for intelligent bus
2.1 增强型状态空间建模
2.1.1 标准状态空间的状态方程
在三自由度智能客车简化模型基础上,增加航向角和侧向位移,形成基于增益调度的客车轨迹跟踪控制策略的状态方程,为智能客车轨迹的位移和航向角跟踪提供基础,计算如下:
状态方程转换成离散方程:

式中:x为状态向量;Y为侧向位移;u为控制向量;Ψ为航向角;x(k)、u(k+1)为离散控制向量.
2.1.2 轨迹预瞄
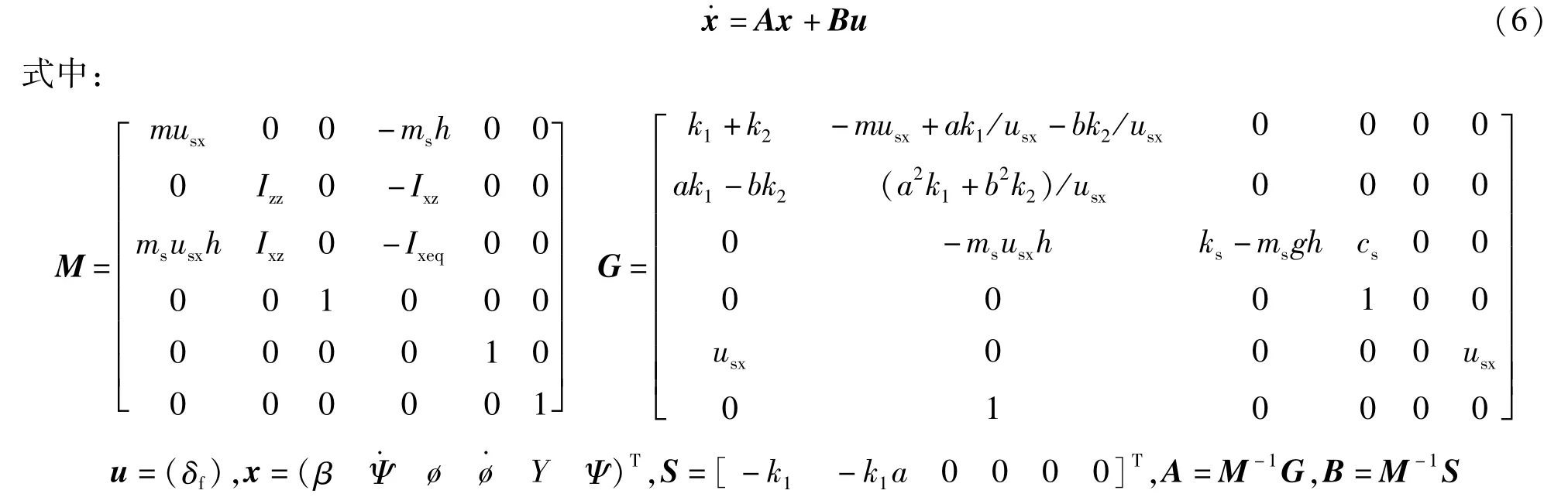
根据参考轨迹的轨迹点,智能客车轨迹跟踪控制采用多点预瞄方式,产生轨迹参考点和轨迹航向角期望值,如图3所示.一个预瞄点位置由轨迹侧向位移和纵向位移决定,求解轨迹预瞄点的实时纵向坐标如下:
图3 轨迹预瞄Fig.3 Trajectory preview

根据式(8)的预瞄点实时纵向位移计算预瞄点实时侧向位移,并组成轨迹侧向位移的位移状态方程:

2.1.3 增强型状态空间的状态方程
由式(7)和式(9)得到智能客车轨迹跟踪策略增强型状态空间的状态方程:

2.1.4 增强型状态空间的输出方程
智能客车轨迹跟踪主要根据参考轨迹的侧向位移和航向角,实现智能客车跟随参考轨迹的运行.因此,将式(13)侧向位移误差和式(14)航向角误差加入到增强型状态空间的输出方程中.同时,考虑到智能客车易发生侧倾稳定性问题,将侧向加速度(式(12))加入到增强型状态空间的输出方程中.通过上述三个指标量,实现融合客车侧倾稳定性的智能客车轨迹跟踪控制.
侧向加速度为:

侧向加速度离散化:

侧向位移误差量为:

航向角误差量为:

轨迹跟踪控制增强型状态空间的输出方程为:
2.2 基于线性变参数的增强型状态空间
线性变参数(Linear Parameter Varying,LPV)方法为:一个矩形多面体描述为由具有相同维数的有限个矩阵的凸点组成,比如:

LPV状态空间连续方程:

式中:Z(k)为控制状态;Yz(k)为控制输出;U(k)为控制输入;Az(ρ)、Bz(ρ)、Cz(ρ)、Dz(ρ)为状态空间矩阵,其取值取决于参数ρ的变化:

状态空间矩阵Az(ρ),Bz(ρ),Cz(ρ),Dz(ρ)经线性变参数变换,如下所示:

为了能够进行智能客车变车速良好地轨迹跟踪,需要使用LPV方法对速度进行处理,使控制策略能够适应智能客车速度变化.并且,采用线性变参数的增益调度控制方法不需要实时求解里卡蒂方程,能够保证控制策略的实时性.
由公式(6)可知,在控制系统中含有智能客车纵向车速usx及其倒数1/usx.在智能客车轨迹跟踪过程中,其纵向速度是在一定范围内[umin,umax],其倒数相应的范围为[1/umax,1/umin].因此,定义一个包含了不确定矩阵的所有可能值的凸四面体,其4个顶点可以选为:

轨迹跟踪控制策略增强型状态空间的状态方程和输出方程为:

2.3 控制算法
智能客车轨迹跟踪采用线性二次型调节器(Linear quadratic regulator,LQR)最优控制算法.控制算法目标是以最小车辆转角控制智能客车,使轨迹跟踪侧向位移和航向角误差最小,且与智能客车侧倾稳定性直接相关的侧向加速度最小.因此,控制策略控制目标函数如下:


式中,λ(k)为拉格朗日乘子向量.
通过哈密顿函数构造里卡蒂方程,并利用Matlab软件求解函数,离线解算此里卡蒂方程,获得智能客车轨迹跟踪控制策略的LQR算法的控制增益K(hi).通过增益调度方法,获得实时的控制增益:

利用公式(26),获得变车速的智能客车轨迹跟踪控制策略实时控制量:

3 控制策略验证
3.1 实验场景
利用Matlab/Simulink软件与Trucksim软件建立联合仿真平台,进行基于增益调度的客车轨迹跟踪控制策略的软件在环仿真实验.所提控制策略利用Matlab/Simulink软件进行编写和解算,并利用决策控制量对Trucksim软件的智能客车实现控制.Trucksim软件是全球权威的车辆仿真软件,与车辆实际性能基本一致,提高了控制策略实际应用价值.同时,Trucksim软件能够进行交通环境设置,例如车道宽度、车流以及路面坡度等,更加接近真实交通环境.典型实验场景详见图4.

图4 智能客车变道示意图Fig.4 Sketch map of lane change for intelligent bus
为了验证所提智能客车轨迹跟踪控制策略,选择了一辆智能客车进行仿真实验,车辆参数详见表1.双线工况为智能汽车侧向运动的重要曲线,其为变道、避障和超车功能实现的重要参考轨迹曲线.为了验证客车轨迹跟踪控制策略的控制效果,设计了动态速度的双移线工况:车速见图5(a)中的车速期望值,参考轨迹为图5(b)中的期望轨迹,附着系数为0.85.同时,为了验证控制策略的增益调度控制效果,在变道过程中,智能车辆速度动态变化.
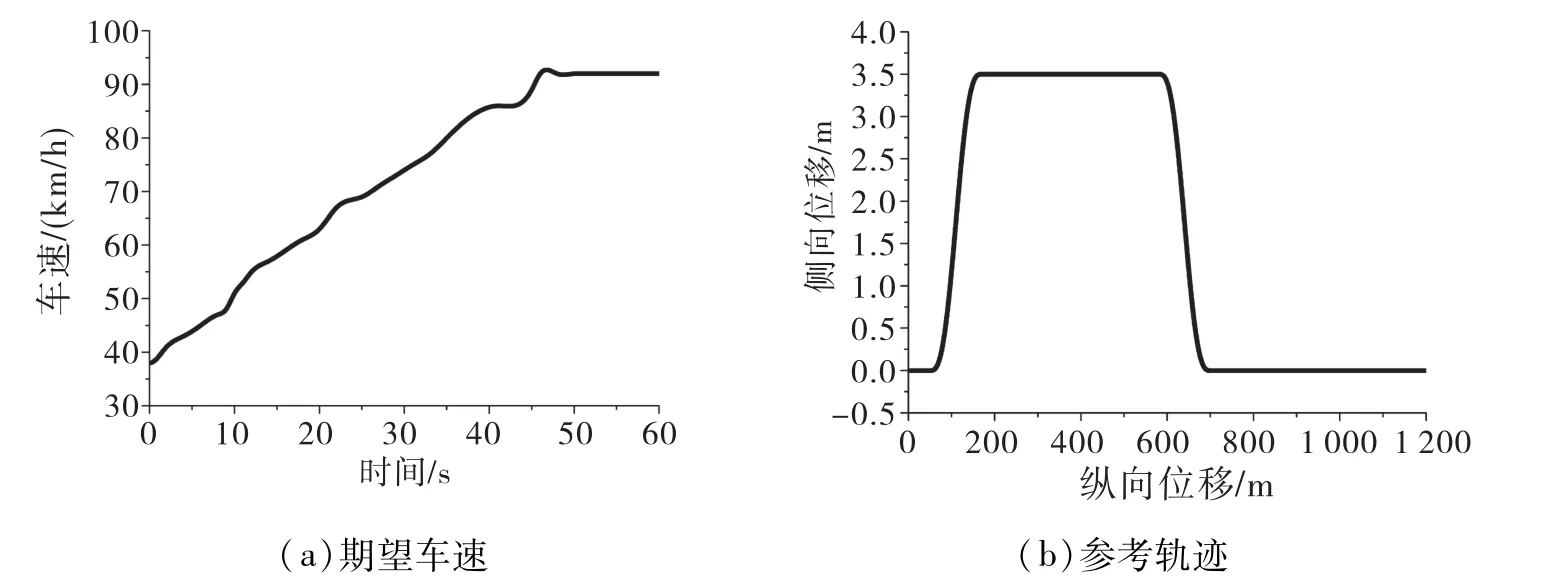
图5 工况设置Fig.5 Working condition set
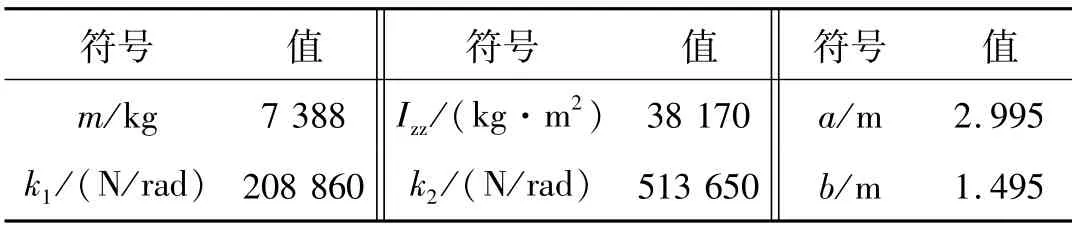
表1 车辆参数Tab.1 Vehicle parameters
3.2 结果分析
所提智能客车轨迹跟踪控制策略的控制效果见图6.由图6(a)可知,在整个双移线工况过程中,智能客车车速动态变化,并且智能客车车速能够跟踪参考车速.由图6(b)可知,所提控制策略的决策控制量平稳光滑动态变化,实现了智能客车双移线工况平稳控制.由图6(c)和图6(d)可知,所提增益调度轨迹跟踪控制策略能够克服车速动态变化,实现轨迹侧向位移平稳光滑的跟踪,并且位移误差小.通过计算可知,侧向位移最大误差量为0.055 m,最大误差量率为1.56%.同时,对姿态跟踪,由图6(e)和图6(f)可知,航向角参考峰值为3.34°,实际航向角峰值为3.41°,峰值最大偏差量为0.07°,峰值误差率为2.14%.
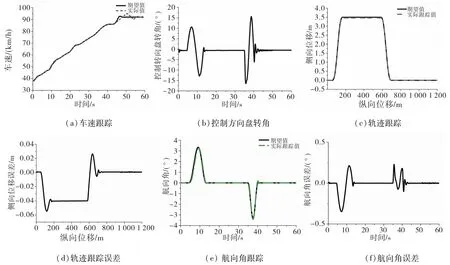
图6 动态速度轨迹跟踪结果Fig.6 Tracking results with dynamic vehicle speed
轨迹跟踪过程的车辆稳定性状态见图7.由图7(a)可知,控制的航向角速度能够平稳变化,并良好地跟踪参考轨迹的航向角速度,且航向角速度变化范围在正负2.3°/s2.由图7(b)~图7(d)可知,整个车速动态变化的双移线工况过程中,智能客车轨迹跟踪的侧向加速度、质心侧偏角和侧倾角平稳变化,且质心侧偏角在正负0.38°范围内,侧向加速度在0.88 m/s2范围内,侧倾角在正负0.21°.因此,融合侧倾稳定性的智能客车轨迹跟踪控制策略能够保证智能客车轨迹跟踪过程的客车横摆侧倾稳定性.由图7(a)和图7(b)可知,采用考虑稳定性的增益调度控制策略优于不考虑稳定性和不采用增益调度的控制策略跟踪效果和车辆稳定性;同时,采用线性变参数的增益调度控制方式因不需要实时求解里卡蒂方程,其运行速度远远快于在线解算控制策略,能够保证控制策略的实时性,提高了控制策略实际车辆应用能力.

图7 轨迹跟踪过程的车辆稳定性Fig.7 Vehicle stability in the trajectory tracking process
综上所述,融合侧倾稳定性的智能客车轨迹跟踪增益调度控制策略能够适应智能汽车动态速度变化,平滑稳定地跟踪车速动态变化的双移线工况,并保持整个工况客车横摆侧倾稳定性,为实际智能客车变道、避障和超车功能实现提供技术支持.
4 结论
1)基于包含侧倾运动的智能客车三自由度简化模型,融合了参考轨迹多点预瞄点,形成了基于线性变参数模型的增强型状态空间,为所提控制策略实现提供了必要基础.
2)提出了融合侧倾稳定性的智能客车轨迹跟踪增益调度控制策略,实现了智能客车轨迹良好地跟踪,保持了轨迹跟踪过程的车辆侧倾稳定性;采用了基于线性变参数模型的增益调度方式,保证了控制策略实时性,奠定了控制策略实车应用基础.
3)进行了仿真控制研究,结果表明:所提控制策略适应了智能客车轨迹跟踪过程中的车速动态变化,实现了轨迹跟踪的位移和航向角平滑稳定良好地跟踪,且保证整个跟踪过程智能客车横摆侧倾稳定性.
4)下一步将进行所提控制策略的硬件在环实验台和实车实验验证.