高阶声场传感器阵列超分辨方位估计方法研究
2021-11-05刘砚鸣汪勇杨益新
刘砚鸣, 汪勇, 杨益新
(西北工业大学 航海学院,陕西 西安 710072)
随着水下目标探测中的可用信噪比降低,传统声呐的尺寸和性能之间的矛盾越来越突出,如何提高阵列在低信噪比以及孔径受限情况下的目标方位估计性能是亟待解决的重要问题。在这种背景下声矢量传感器备受关注,常见的矢量传感器由一个声压传感器和几个振速传感器组成,可以同步获取空间中同一位置的声压,振动速度甚至更高阶的声场信息[1-4],能够带来单个传感器以及阵列参数估计性能的提升。矢量传感器有着多输出的特点,对于这一特殊的信号结构,Nehorai等[1]提出了矢量传感器阵列的长矢量信号模型,将矢量传感器的每个输出分别视为一个独立阵元的输出。基于该模型,适用于声压传感器阵列的大多数阵列信号处理算法可以应用于矢量传感器阵列。在实际应用中大多数矢量传感器只能测量声压和一阶振速,获得的增益有限,虽然目前的一些研究着眼于更高阶[5]且硬件实现上也初具雏形,但是高阶矢量传感器的研发及应用仍然面临着一些难题[4]。
相位模态域阵列信号处理是一类基于圆环阵列或是球面阵列的信号处理方法,相位模态理论以阵列入射平面波的空间傅立叶分析为基础,通过傅立叶级数得到声压传感器的加权系数,从而获得正交的谐波分量[6-8]。Meyer等[9-10]将相位模态波束成形理论应用于安装在球面上的圆环及球形麦克风阵列,获得了优秀的指向性,Teutsch[11-13]对2种阵列的相位模态理论及相位模态域的部分方位估计算法有较为全面的论述,Sun等[14]利用球面麦克风阵列在室内混响条件下对几种常见的相位模态域方位估计算法进行了实验分析。目前针对相位模态域信号处理展开的研究多局限于单个圆环阵列或是球面阵列,鲜有研究将其作为阵元组成阵列以提高目标方位估计性能。
本文将以圆环孔径为研究对象,提出基于相位模态理论的高阶声场传感器的概念,并构建高阶声场传感器阵列的信号模型,借鉴矢量传感器阵列的思想进行信号处理以充分发挥其性能优势,并采用超分辨方位估计方法中常用的MUSIC算法进行性能分析。高阶声场传感器能够利用比矢量传感器更容易实现的物理结构获取更高阶的声场信息,具有和矢量传感器相似的多维信号结构。通过仿真分析发现高阶声场传感器阵列较矢量传感器阵列具有更好的方位估计性能。
1 基于相位模态理论的高阶声场传感器的信号模型
本文以二维平面为研究场景,平面内有K个复高斯信号源分别位于[θ1θ2…θK]方向。本节将构建高阶声场传感器的信号模型。
基于相位模态分解理论的高阶声场传感器可以利用声压传感器组成的圆环阵列构造。如图1所示,单个高阶声场传感器实质上是一个由M个声压传感器均匀分布而构成的小型圆环阵列,位置等效为圆环孔径的圆心。这些声压传感器在θ方向的导向向量为列向量a(θ),其中第m个元素为:
(1)
式中:λ为波长;pm=(x,y)T为第m号声压传感器的位置向量,x和y分别为横纵坐标;u=(cosθ,sinθ)T为单位方向向量。
高阶声场传感器中声压传感器的接收信号xp(t)=[x1(t)x2(t) …xM(t)]T可以表示为:
xp(t)=As(t)+ep(t)
(2)
其中:t为时间快拍;A=[a(θ1)a(θ2) …a(θK)]为阵列流形矩阵;s(t)=(s1(t),s2(t),…,sK(t))为声源信号;ep(t)为t时刻的接收噪声向量。
以声透明圆环阵列的柱面谐波分解[7,12]为例,对接收到的声压信号进行相位模态分解可得高阶声场传感器的n阶输出信号:
(3)
式中:n为模态阶数;ϑm为m号与1号声压传感器之间对应的圆心角。相位模态信号的最高阶数受到声压传感器数量的限制,满足M>2Nmax,因此高阶声场传感器输出的通道数为Nc=Nmax+1。
对声压传感器的导向向量进行分解,可以获得n阶相位模态对θ方向的响应:
inJn(kR)exp(-inθ)
(4)
式中:k=2π/λ为信号波数;R为圆环半径。如不考虑幅度项,单个高阶声场传感器的导向向量为:
h(θ)=[1 iexp(-iθ) … inexp(-inθ)]T
(5)
n阶相位模态响应的方位角相关项exp(-inθ)的实部和虚部分别为cos(nθ)和sin(nθ),如图2所示。

图2 高阶声场传感器各阶响应的方位角相关项Fig.2 Azimuth-dependent component of the phase mode of the HOAS
将式(2)代入式(3),可以将其改写为:
Jn(kR)hns(t)+e′n(t)
(6)
式中:hn=[inexp(-inθ1) inexp(-inθ2) … inexp(-inθK)];e′n(t)为声压传感器接收到的噪声信号经过n阶分解后所得噪声部分。
此外,在作为阵元组成阵列使用时,高阶声场传感器的半径受到阵元间距d的限制,即:
2 高阶声场传感器阵列超分辨方位估计
高阶声场传感器阵列的信号处理借鉴了矢量传感器阵列的思想,将单个高阶声场传感器的每一阶输出看作是一个独立阵元的输出信号,从而可以将阵列的每一时刻的各路输出排列成一个矢量,称为长矢量模型。该模型中N个高阶声场传感器的输出可等效为NNc个独立阵元的输出信号:
X=Ls+e′L
(7)
其中,s=[s1s2…sK]为声源信号矩阵;e′L为声压传感器的接收噪声经相位模态分解后按长矢量排列所得的噪声矩阵;L=[l(θ1)l(θ2) …l(θK)]为高阶声场传感器阵列导向向量矩阵,其中θ方向的导向向量为:
l(θ)=b(θ)⊗h(θ)∈CNNc×1
(8)
式中b(θ)为阵列的导向向量,可通过将阵元位置代入式(1)获得。
阵列输出的协方差矩阵为:
R=E[XXH]∈CNNc×NNc
(9)
以MUSIC算法作为超分辨方法应用于高阶声场传感器阵列,该方法利用了信号和噪声子空间之间的正交性,通过特征分解R=UΣUH求得R的子空间为U=[UsUn],Σ是主对角线元素为特征值的对角矩阵。本文中假设目标数已知,根据目标数截去前K个较大特征值对应的特征向量,得到噪声子空间Un,由此可得MUSIC算法的空间方位谱为:
(10)
最后通过谱峰搜索获取目标方位。与高阶声场传感器相比,矢量传感器仅由一个声压传感器和2个相互垂直的振速传感器组成,其导向向量为:
v(θ)=[1 cosθsinθ]T
(11)
在二维平面各向同性噪声场[15]中,各通道的归一化噪声互谱矩阵为ρn=diag(1,1/2,1/2)[16]。
在矢量传感器阵列的长矢量模型[1]中,接收信号矩阵Xv为:
Xv=Lvs+ev
(12)
其中Lv=[lv(θ1)lv(θ2) …lv(θK)]为矢量传感器阵列的导向向量矩阵;lv(θ)=b(θ)⊗v(θ)为θ方向的导向向量;ev(t)为噪声矩阵。对矢量传感器阵列,同样可以应用MUSIC算法进行方位估计[2]。
与矢量传感器相比,高阶声场传感器的0阶响应与矢量传感器中声压传感器的响应一致,1阶响应的实部和虚部分别与单个振速传感器的响应一致,两种传感器的信号结构存在一定相似之处。
3 数值仿真与分析
本节将对高阶声场传感器阵列(高阶阵)的方位估计性能进行仿真分析,并与矢量传感器阵列(矢量阵)的性能进行比较,主要从对双目标的分辨能力以及成功分辨情况下的均方根误差展开,为了得到更客观的结论,将从信噪比、快拍数、阵元数、目标的角度间隔等因素对阵列方位估计性能的影响进行仿真分析。
在仿真中均匀直线阵沿x轴按照阵元间距为半波长布放,假设每个阵元之间噪声不相关。在二维平面中远场存在2个等强度不相关的复高斯声源,蒙特卡洛实验次数为500。如果没有特别指出,高阶阵列和矢量阵列阵元个数均为6,快拍数为200,声源分别位于50°和60°方向,信噪比定义为:
(13)
阵列成功分辨两目标的判定标准为[17]:
(14)
在此基础上,分辨概率为成功分辨的仿真次数与总次数的比值。均方根误差定义为:
(15)
式中T′为统计实验次数。
在仿真中,高阶声场传感器的半径满足kR=1,高阶阵列的阶数表示阵列中高阶声场传感器阵元的阶数。当阵列的分辨概率较低时,成功分辨的仿真次数较少,此时样本数较少的均方根误差不足以反映统计特性,不再给出相应的结果。
图3给出了不同阵列的分辨概率随信噪比的变化情况,从中可以看出,在信噪比为-7~0 dB高阶阵对2目标的分辨能力优于矢量阵列,3阶高阶阵列的分辨概率最大,当信噪比为-4 dB时,2阶高阶阵的分辨概率较矢量阵列高出大于0.3,在信噪比在大于0 dB时,2种阵列的分辨能力基本一致。与之对应,图4给出了相应信噪比下成功分辨的仿真所得目标方位估计值的均方根误差,在低信噪比下矢量阵列的误差大于高阶阵列,阶数较高的高阶阵列误差较小,随着信噪比增大各阵列的误差逐渐趋于一致。
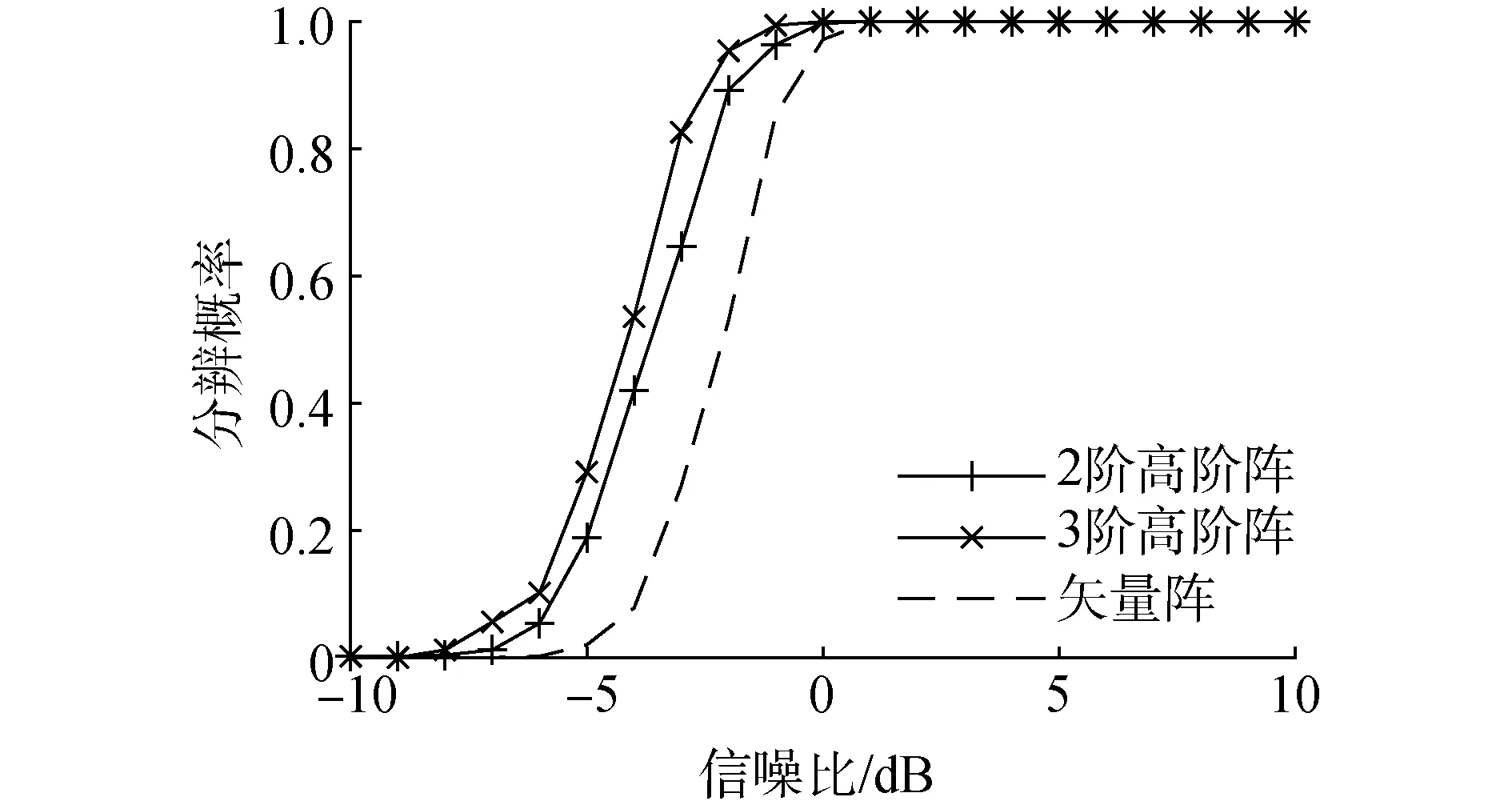
图3 不同阵列对2目标的分辨概率随信噪比变化情况Fig.3 Detection probability of two targets versus SNR for different arrays
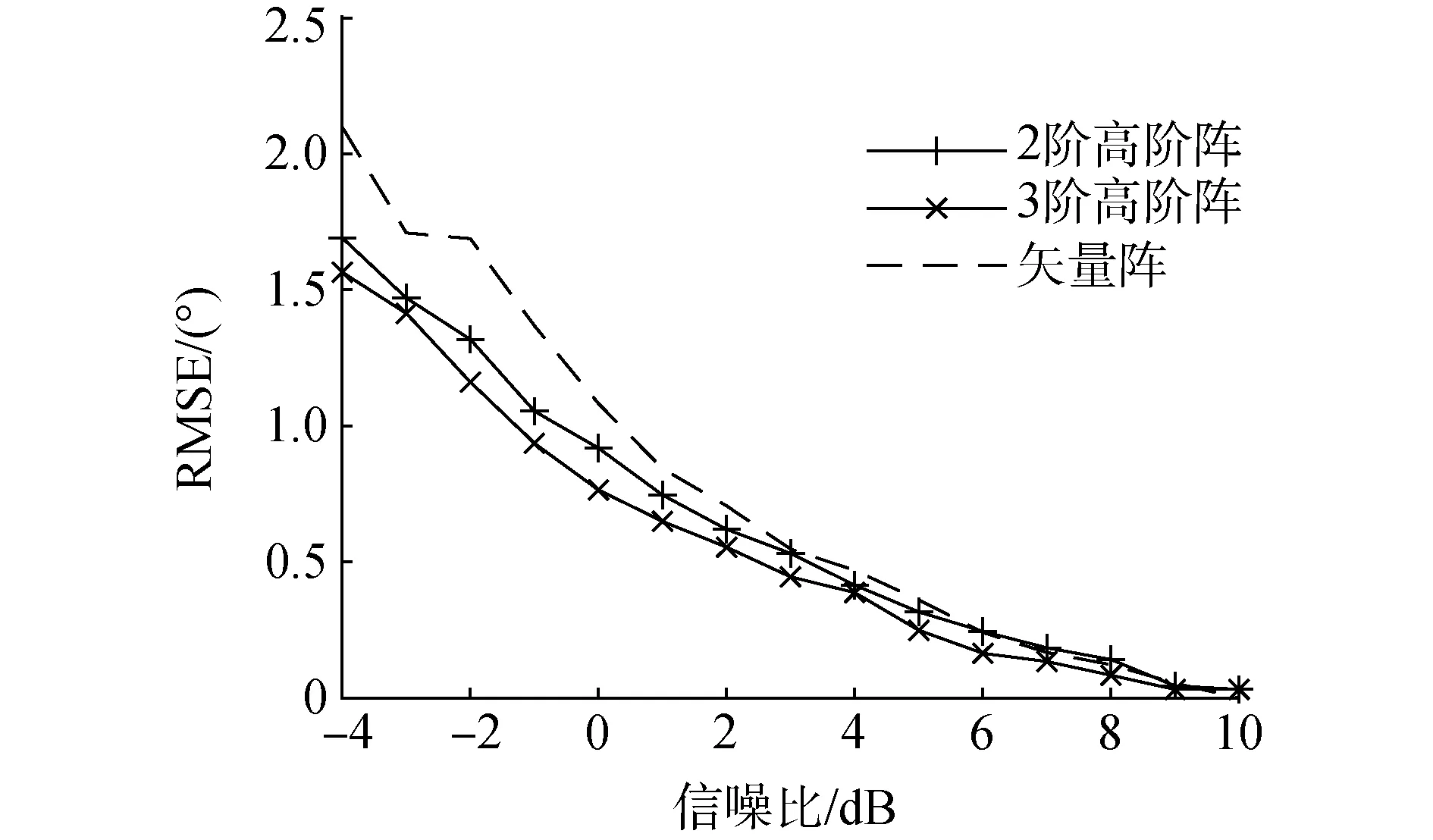
图4 不同阵列成功分辨后方位估计结果的均方根误差随信噪比变化情况Fig.4 RMSE of DOAs versus SNR for different arrays in case of successful detection
图5给出了在信噪比为0 dB时不同阵列对2目标的分辨概率随快拍数变化情况。从中可以看出,在快拍数小于250的条件下,高阶阵列较矢量阵列有更强的双目标分辨能力,3阶高阶阵列较2阶阵列有更强的分辨能力。图6给出了相应快拍数下成功分辨的仿真所得方位估计值的均方根误差,给定的快拍数下矢量阵列的误差最大,越高阶数的高阶阵列误差越小。
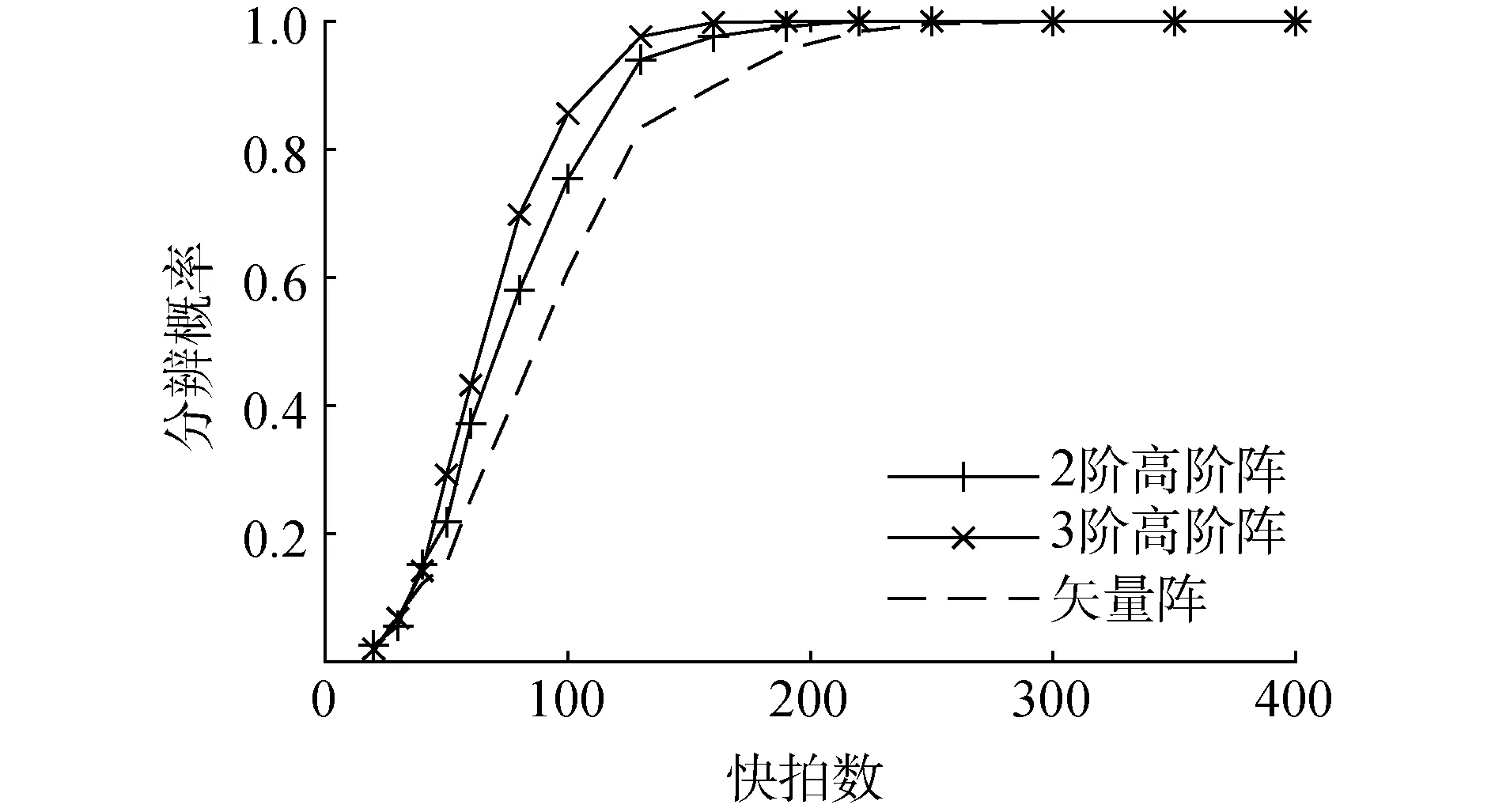
图5 不同阵列对两目标的分辨概率随快拍数变化情况Fig.5 Detection probability of two targets versus the number of snapshots for different arrays
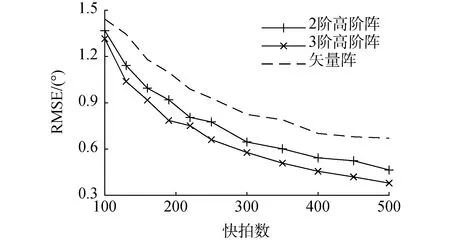
图6 不同阵列成功分辨后方位估计结果的均方根误差随快拍数变化情况Fig.6 RMSE of DOAs versus the number of snapshots for different arrays in case of successful detection
图7给出了信噪比为0 dB时不同阵列对2个目标的分辨概率随阵元数变化情况,阵元间隔均为半波长,从图中可以看出,对于6~8个阵元的均匀直线阵,高阶阵列比矢量阵列有更高的分辨概率。图8给出了相应阵元数下阵列成功分辨的仿真所得目标方位估计值的均方根误差,高阶阵列较矢量阵列具有更小的估计误差,给定仿真条件下阵元个数越少其优势越明显,当阵元数增多到11个时,各阵列的分辨概率趋近于1,估计误差趋近于0。整体来看,3阶高阶阵列的方位估计性能最优,矢量阵列稍差。
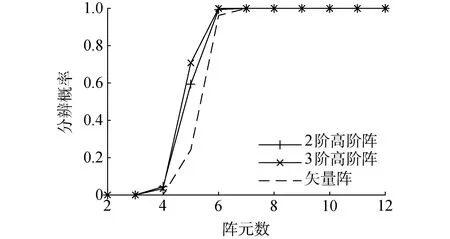
图7 不同阵列对2目标的分辨概率随阵元数变化情况Fig.7 Detection probability of two targets versus the element number for different arrays
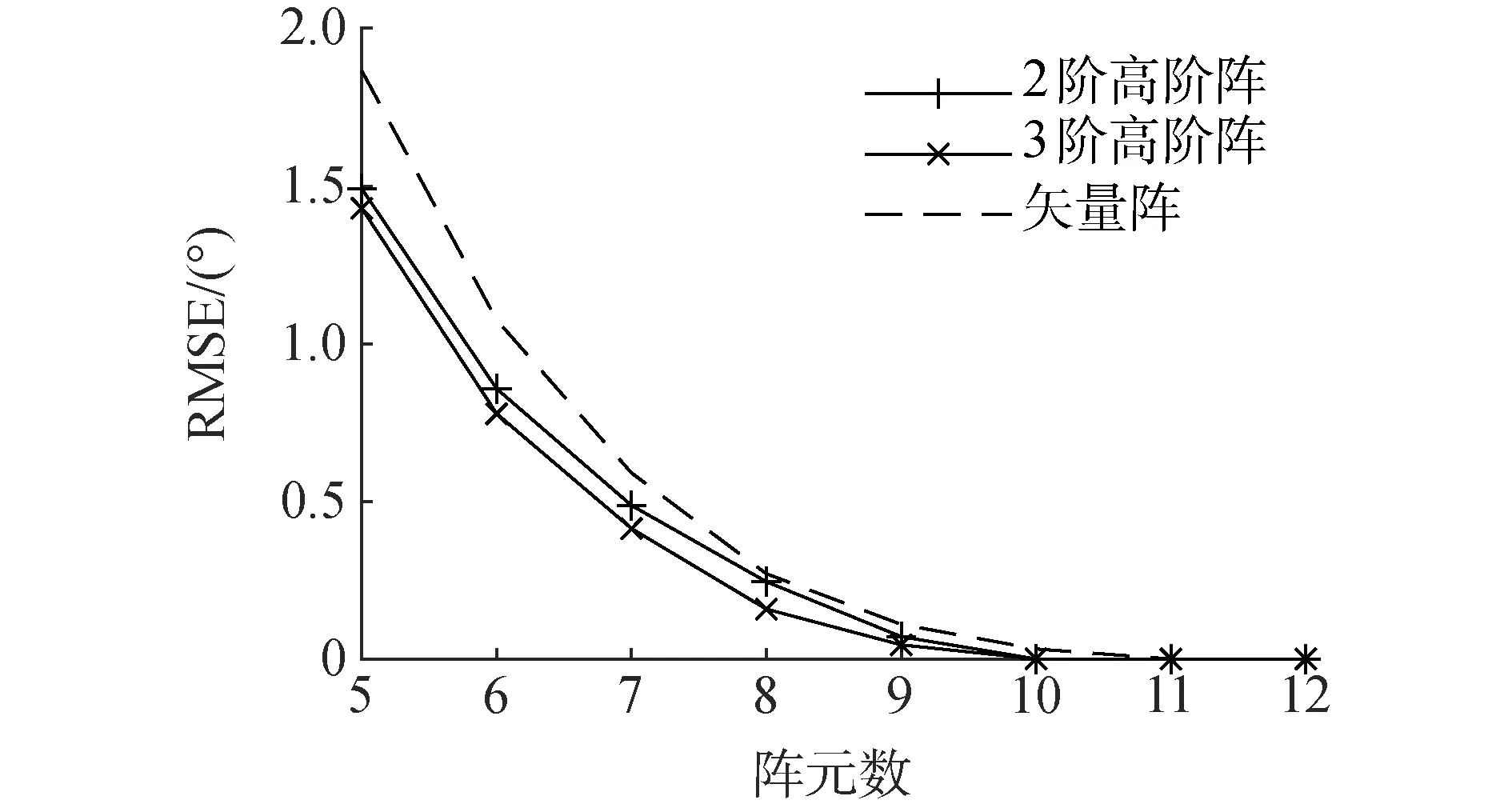
图8 不同阵列成功分辨后方位估计结果的均方根误差随阵元数变化情况Fig.8 RMSE of DOAs versus the element number for different arrays in case of successful detection
图9给出了信噪比为0 dB时不同阵列对2个目标的分辨概率随目标间隔变化情况,仿真中目标1位于80°方向,目标2则在84°~94°变换。从中可以看出,在角度间隔为6°~8°,高阶阵的分辨概率高于矢量阵列,在7°时2阶高阶阵列的分辨概率高出矢量阵列大于0.3。从图10不同阵列成功分辨后方位估计结果的均方根误差随目标间隔变化情况可以看出,给定仿真条件下高阶阵列的误差始终小于矢量阵列,随着目标间隔的增大,2阶高阶阵列与矢量阵列估计误差之间的差距逐渐减小。在间隔相对较小的情况下,阶数越高的高阶阵列方位估计性能越好,较矢量阵列存在一定优势。

图9 不同阵列对2目标的分辨概率随目标间隔变化情况Fig.9 Detection probability of two targets versus the azimuth angle between them for different arrays
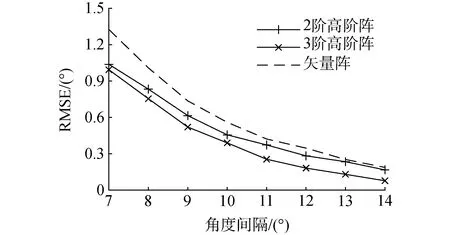
图10 不同阵列成功分辨后方位估计结果的均方根误差随目标间隔变化情况Fig.10 RMSE of DOAs versus the azimuth angle between two targets for different arrays in case of successful detection
综合以上仿真结果可以发现,在低信噪比、少快拍、小阵元数、小目标间隔的仿真中,高阶声场传感器阵列与矢量传感器阵列相比,均展现出了一定的方位估计性能优势。
4 结论
1)物理结构较为简单,而且可以通过增加声压传感器的数目来获取更高阶的信号。
2)在长矢量模型中以MUSIC算法为例,在信噪比低、快拍数少、阵元数少、目标间隔小的条件下,高阶声场传感器阵列对多目标具有更好的分辨能力和更小的均方根误差。
后续研究将把二维空间中高阶声场传感器阵列的处理方法推广至三维空间中的球面高阶声场传感器,并对高阶声场传感器阵列的优化方法展开研究。
