基于增强现实技术的可视化实时引导系统在股骨头坏死髓芯减压术中定位的初步临床试验*
2021-11-05王淇姚有杰邹昆丁冉张启栋王卫国
王淇 姚有杰 邹昆 丁冉 张启栋 王卫国
股骨头坏死(osteonecrosis of femoral head,ONFH)是骨科常见病之一,多发于20~50 岁的青壮年,股骨头髓芯减压是早期股骨头坏死常用的保髋术式[1-2]。有研究证实,髓芯减压配合或不配合植骨术对早期股骨头坏死治疗有着一定的效果,可以延缓股骨头坏死进展,但临床报道效果不一,其中股骨头钻孔的准确性至关重要[3-5]。传统的手术方式在使用克氏针进行病灶穿刺定位时仍面临着X 线透视次数多、需反复穿刺验证、损伤正常骨组织等问题[6]。穿刺过程盲目性大、无法“实时可视化”是造成以上问题的重要原因。
近年来,增强现实(augmented reality,AR)技术辅助手术治疗的研究逐渐在外科领域兴起,AR 技术可以直观展现出手术区域的解剖情况,以此指导术者进行手术路径规划,极大地便利了手术操作[7]。该技术在椎弓根螺钉植入和关节置换等方面的研究报道初步证明了其可行性[8-9]。本课题组联合北京师范大学团队自主设计并研发了一套基于AR技术的可视化实时引导系统,并完成了比格犬股骨头穿刺动物试验,穿刺精度良好[10]。在前期工作的基础上,笔者尝试将此系统用于股骨头坏死髓芯减压术的导针定位,以期进一步验证其临床安全性、精准度和可行性。临床试验获得中日友好医院伦理委员会正式批件(2021-12-K04)。
1 资料与方法
1.1 一般资料
试验组为2021 年1 月至2021 年3 月就诊于本院并被诊断为股骨头缺血性坏死拟行髓芯减压手术的患者;对照组选择2019 年1 月至2021 年3 月在本院行传统C 型臂X线透视引导下股骨头坏死髓芯减压术的符合配对条件的患者。两组患者按照1∶1 配对,配对条件为性别相同、年龄相近(±3 岁)、影像学病变程度相似。配对病例选择调查工作由具有该种调查研究经验的调查员独立完成。术前取得患者书面知情同意。
纳入标准:①有患侧髋关节疼痛、活动受限等临床症状;②经影像学检查(CT、MRI)确诊股骨头坏死;③拟行股骨头坏死髓芯减压+/-植骨手术。
排除标准:①存在精神障碍不能配合手术;②术前常规检查不满足手术条件;③合并感染等手术禁忌证。
1.2 主要仪器设备
试验组所采用的基于AR技术的可视化术中实时引导系统是目前尚未投入临床使用的研究原型机。系统硬件包括64 位Windows 10 工作站、NDI 被动红外定位装置、配备定位参考架的手术动力装置(见图1A、图1C)、无创体表定位装置(见图1B)、ZED 双目摄像机(见图1D)。系统功能模块包括:①术中X 光增强显示功能模块,基于YOLO-v3模型[11]设计无创标记识别算法,可以在被动红外定位装置侦测空间和深双目摄像机视频空间中获得基准标记的三维位置,将透视图像叠加在术中视频上;②三维模型克氏针实时导航模块,根据被动红外数据计算克氏针映射在虚拟三维空间中的位姿信息,实现三维模型的实时渲染、克氏针模型的实时动态导航,最终实现穿刺针与X 光影像的实时耦合与术中增强现实引导。可视化术中实时引导系统、C 型臂X 线透视设备及手术空间的配置如图2 所示。

图1 术中实时定位装置:A.定位参考架;B.无创体表定位装置;C.配备定位参考架的手术动力装置;D.ZED 双目摄像机

图2 手术室配置实景及示意图
1.3 手术方法
手术操作在配备C 型臂X 线透视机(SIMENS Siremobil Compact L)的标准化手术室由同一名关节外科医生在本课题组助手的协助下完成。术前助手利用无创体表定位装置,在既定手术区域内首先完成双目摄像机、NDIPolaris 光学追踪设备的配准。手术正面区域划分为上、下两个30cm×30cm 层面,各层面配准点10 个,层面间高度差15 cm。患者麻醉后仰卧位,下肢使用牵引器固定后行手术部位的常规消毒和铺单。电动手术床平移至C 型臂透视机放射源正下方(定义为“位置1”),将低温消毒后的无创体表定位装置置于患侧髋关节皮肤表面进行透视,透视后平移手术床至双目摄像机正下方的手术区域。透视影像拷贝至系统中进行图像叠加,术者依此规划穿刺路径。患髋大转子下方2~3 cm 为进针点,克氏针刺入的同时开始计时,术者以实时视频中虚拟克氏针影像为引导,当虚拟针尖到达股骨头坏死灶目标区域后停止穿刺,保留屏幕截图,留置钻头,将手术床平移至“位置1”行透视操作,验证克氏针正位实际穿刺情况,调整下肢牵引取患髋蛙式位,验证侧位穿刺情况。若发现导针位置不满意,可将手术床平移回手术区域,无需再次配准,可直接在系统引导下再次置针;若验证克氏针符合手术入路要求,则证明穿刺定位成功,停止计时,完成后续手术操作(空心钻髓芯减压或经大转子病灶清除打压植骨)(见图3)。对照组使用传统方法在C 型臂X 线透视引导下将定位克氏针钻入股骨头坏死目标区域,其余手术操作与试验组相同。

图3 试验组定位克氏针置入过程:A.手术区域配准;B.配准操作页面;C.配准完成后的三维模型渲染;D.患者麻醉后牵引患肢;E.含无创体表定位架的患髋X 光影像;F、G.术者依据实时视频行穿刺操作;H.穿刺成功屏幕截图;I.术后置针位置验证;J.术中C 型臂屏幕显示;K.系统操作界面;L.引导穿刺屏幕显示
1.4 观察指标及评价标准
将正位穿刺成功的屏幕截图导入Adobe Photoshop CS6软件(Adobe Systems Software Ireland Ltd.),穿刺后X 线片调整图片透明度为52%与前述屏幕截图拟合重叠,使用“标尺工具”测量。
测量试验组穿刺距离误差|△L|(克氏针针尖到股骨皮质穿刺点的距离Lture-虚拟针尖到股骨皮质穿刺点的距离Lvirtual)、角度误差△A(虚拟针体与实际针体夹角)。两部分误差各自分为四个评级,距离评级(优:0mm<△L≤2mm、良:2 mm<△L≤4 mm、中:4 mm<△L≤6 mm、差>6 mm);角度评级(优:0°<△A≤3°、良:3°<△A≤6°、中:6°<△A≤8°、差:>8°)。优良率=(优+良+中)/总髋数×100%。
对比两组穿刺定位用时及C 型臂总透视次数。试验组和对照组平均随访时间分别为1.4 个月(1~4 个月)和14.5 个月(6~25 个月)。收集17例患者术前和末次随访所得VAS评分(visual analoguescore,VAS)与Harris 髋关节评分。统计两组患者围手术期并发症的发生率,包括血管神经损伤、血肿形成、感染、下肢深静脉血栓栓塞、金属器械断裂或残留等。
1.5 统计学方法
使用SPSS 23.0 软件进行统计学分析。使用t 检验比较两组患者年龄,术前、术后的VAS 评分、Harris 评分,定位时长,透视次数及穿刺精确度;Fisher 检验比较两组患者性别和ARCO 分期。P<0.05 为差异有统计学意义。
2 结果
一般资料包括病例数、性别、年龄、ARCO 分期,两组比较差异均无统计学意义(P>0.05,见表1),具有可比性。

表1 两组患者的一般资料比较
在末次随访中,试验组平均Harris评分由术前(77.5±7.9)分提高至(85.5±3.0)分,平均VAS 评分由术前(6.0±1.2)分减低至(3.8±0.7)分;对照组平均Harris 评分由术前(71.8±7.0)分提高至(83.7±4.7)分,平均VAS 评分由术前(6.7±1.3)分减低至(3.7±1.1)分。两组患者术前、术后的VAS 评分和Harris 评分比较,差异无统计学意义(P>0.05),见表2。两组均未发生血管神经损伤、血肿、感染、下肢深静脉血栓栓塞、金属器械断裂或残留,手术相关不良事件发生率为0%。
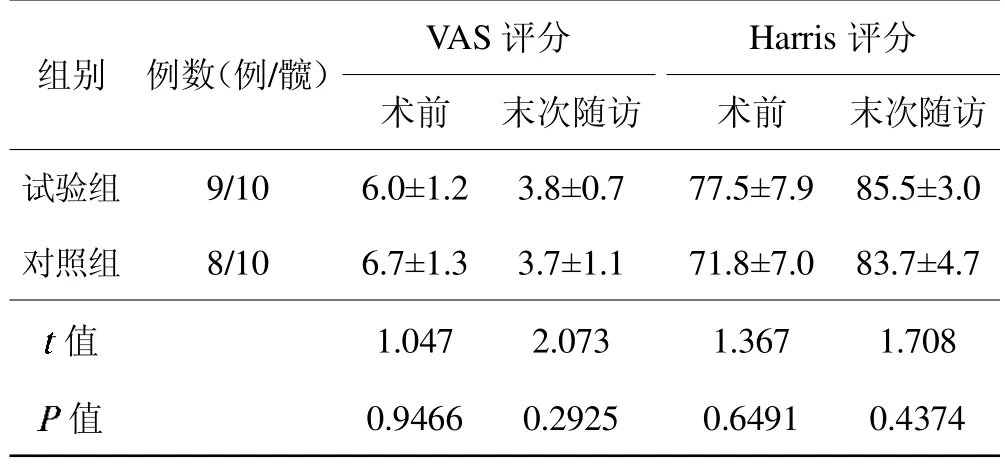
表2 两组患者VAS 评分和Harris 评分比较(分)
试验组穿刺定位时长(10.1±1.9)min 明显低于对照组(19.1±2.5)min;试验组的C 型臂X 线透视次数(5.5±1.3)次也明显少于对照组(14.8±12.1)次,差异具有统计学意义(P<0.05),见表3。

表3 两组患者术中定位时长及透视次数比较
试验组定位穿刺距离及角度测量结果见图4。平均距离定位误差△L=(5.0±5.2)mm(P=0.7646),其中2 次误差水平为“优”、4 次为“良”、3 次为“中”,穿刺距离优良率(RL)为90%。平均角度定位误差△A=(6.4±2.5)°(P=0.9649),其中1 次角度误差水平为“优”、3 次为“良”、2 次为“中”,穿刺角度优良率(RA)为60%。即使操作均由同一名医生完成,但距离误差仍有1 次大于6 mm,角度误差有4 次大于8°,因此我们评估了穿刺距离和角度的可重复性分别为Lerror=6.2%±7.0%、Aerror=20.7%±14.0%(P=0.0249)。


图4 定位距离和角度及其误差情况:A.距离误差;B.角度误差
3 讨论
股骨头坏死好发于中青年,这些患者应尽可能采取适当的措施来延缓或避免关节置换。在青壮年股骨头坏死患者的治疗中,髓芯减压术可有效缓解疼痛和延缓股骨头塌陷进展[12],髓芯减压结合植骨术是对单纯髓芯减压术的改进,有研究证实其对于早期股骨头坏死患者有更好的治疗效果[3],但此术式术中坏死灶定位穿刺仍有一定的盲目性,面临着反复穿刺、高辐射暴露、耗时较长且不稳定的问题[6-7]。业内学者也提出了多种提高穿刺效率的方法,如陈冬冬等[13]术前利用3D打印技术显示患侧股骨头坏死灶所在位置,以此规划最佳穿刺路径,但是术前打印耗时较长,打印偏差带来的误差也无法补足。Theopold 等[14]尝试先由髋关节镜对股骨头坏死部位进行特殊标记,再结合配套的光电导航装置进行穿刺,但髋关节镜的加入也增加了操作的复杂性和难度。Bi等[15]将TiRobot 机器人辅助导航系统用于髓芯减压术,结果表明机器人辅助组的克氏针插入时间、尝试次数和辐射暴露均显著低于对照组,但术中追踪器需要有创固定于术侧的髂前上棘,带来的副损伤不满足保髋手术的“微创化”原则,且延长了术前准备时间。本课题组开发的手术引导系统在术前配准过程规划出了虚拟手术区域,在此区域内均能保证NDI 光学追踪设备的高精度追踪和虚拟克氏针显示,可按需调整患髋角度进行二次拍摄与叠加。术前手术区域平均配准时间为15 min,配准完成后在同一个区域进行新的手术,不需要再重新配准,只需将待手术的患者平移置此区域内即可。本系统使用自主研发的无创体表定位装置完成患髋的配准,不会造成任何穿刺之外的损伤,具有更高的安全性,更加符合“微创”的手术原则。
AR 技术是一种虚拟影像与现实环境的交互体验方式,它将原本在现实世界中难以直接由感官感知到的信息叠加到实时视频画面中,实现虚拟与现实的融合[16]。AR 技术与外科手术的结合屡被尝试,如基于AR 导航的椎弓根螺钉植入[17]、AR 技术辅助的骨折治疗[18]和骨肿瘤切除等[19],但在髓芯减压术穿刺引导方面,国内外暂未见相关文献报道。传统的穿刺定位方法是通过穿刺过程中反复的床旁透视进行,对术者的个人经验、手眼协作能力都有较高要求[20]。有统计数据表明,即使是基于X 线透视的计算机辅助穿刺相关操作,术中置入导针的失位率也在2%~15%[21]。也有研究者尝试将计算机断层扫描(computer tomography,CT)引入本术式[4],目前也仅停留在体外实验阶段。虽然术中CT 三维建模理论上会比X 线的二维视图准确性高,但相比于C 型臂透视机,使用CT 辅助则成本较高、辐射暴露量大、数据处理时间长[22]。其次,常规CT 设备的低便携性也制约了其术中应用,相对便携的术中CT 机(O-arm)的普及也受制于其高昂的造价和尺寸过小的问题。另外,CT 图像处理较为烦琐,本研究现有算法并不能使CT 图像达到满足临床需要的配准精度,还需进一步优化。本系统在操作过程中,试验组C 型臂平均透视次数为(5.5±1.3)次,明显低于对照组的(14.8±12.1)次,因此,本系统最大的优势在于实现了股骨头坏死髓芯减压术的“实时可视化”和“低辐射暴露率”。
AR 技术在骨科手术中的应用尚处于起步阶段,AR 技术的精准性、便捷性、实时可视化等优势使其在骨科手术实践中有着广阔的应用前景。本系统在试验过程中,术中记录到自克氏针破皮至C 型臂X 线透视机验证克氏针穿刺成功,操作时间仅需8~14 min,总平均定位时长(10.1±1.9)min,显著低于对照组的(19.1±2.5)min。平均距离定位误差(5.0±5.2)mm,平均角度误差(6.4±2.5)°,精度的误差在该术式可接受的范围内,笔者分析误差的产生有以下几个原因:①克氏针在穿破股骨皮质过程中发生微小形变,导致实际针体与虚拟针体发生重叠偏差;②穿刺过程中患者股骨受到针体外力作用发生轻度移位,手术视频中患髋叠加影像不能完全与实际患髋重合;③手术系统算法自身误差影响。以上误差均需在后续临床实践和算法改良中逐步减小。但从临床实践结果来看,与传统术式相比,本系统能够在保证克氏针穿刺定位精度的同时大幅缩短手术操作时间。
另外,本研究也存在一些不足。首先,该操作系统在实际操作中仍有进一步优化的空间,相信随着设备的性能进一步提升会更好地服务于临床。其次,试验组所纳入的样本量较小,纳入更大样本量的研究将会提供更可靠的数据。最后,本研究报道了我们初试的早期临床结果,患者随访时间较短,进一步的患者随访和横向比较更有利于评估基于本文所述方法的临床疗效。
综上所述,在基于AR 技术的可视化术中实时引导系统的辅助下,有望解决股骨头坏死髓芯减压术中定位反复穿刺、辐射暴露较高的问题,且穿刺定位具有较高的准确性,在实现股骨头坏死髓芯减压术中定位实时可视化的同时保证了穿刺的精准。因此,将术前影像和穿刺针实时渲染至术中视频,实现“术中实时可视化”的方法可行。
