齿轮五杆机构计算机辅助设计软件的开发
2021-11-03张慧敏姜荣俊任前程
张慧敏, 姜荣俊, 陶 芬, 王 君, 任前程
(湖北工业大学机械工程学院, 湖北 武汉 430068)
齿轮五杆机构由变传动比的五杆机构和定传动比的齿轮机构组成,是一种新型、用途广泛的组合机构。因能够实现各种复杂的运动,其逐渐成为组合机构中的研究重点[1]。李佳等[2-3]以两原动件的任意组合,使机构运动到极限位置作为机械模型,推导出两自由度五杆机构的可动性充分条件,为机构尺寸综合提供了尺寸约束条件。Sandor等[4-8]分别采用不同的运动分析方法对齿轮连杆机构进行了运动综合与分析。张艳华等[9]利用CAD软件,建立了带约束的平面机构模型,并根据负载情况分析了平面机构的运动学特征。Wang等[10]提出了一种适用于任何单自由度平面和球面双环连杆机构的奇异条件及旋转关节空间的识别方法,在机构设计和综合过程中将无分支点作为完全旋转性约束条件,避免运动缺陷,并利用平面六杆机构进行了验证。研究发现,在机构综合的过程中,得到的大量备选机构还必须进行可动性矫正。Gregorio[11]提出了多自由度球面机构奇异性的分析方法;谢睿[12]基于球面四杆机构及共形几何代数中的代数运算法则,提出了一套关于2T1R并联机构转动能力设计缺陷辨识的方法,对于具有转动能力设计缺陷的机器人,采用改进细菌群趋药性优化算法,对杆长值进行优化,实现了对转动能力设计缺陷的修复。
目前,对于齿轮五杆机构的可动性运动分析多为理论方面的研究,判断其关节旋转空间及奇异点位置的过程非常复杂,计算时间长,求解效率低。针对这一问题,本文结合QT creator软件与理论方法,通过一种计算机辅助设计软件,将齿轮五杆机构参数导入该软件,可对其分支点、分支进行自动识别,在显示区可直接观察到分支缺陷情况。若得出无运动缺陷的分支,可直接输出机构分支图;若得出有运动缺陷的分支,则可根据结果显示区的提示,选取范围内的传动比n和初相角β,纠正分支。
1 齿轮五杆机构可动性分析
1.1 齿轮五杆机构环路
齿轮五杆机构可视作一个二自由度五杆机构与一个齿轮机构相耦合。齿轮机构约束了五杆环的一个自由度,使二自由度五杆机构变成单自由度双环机构[13]。如图1所示,a5为机架,主动齿轮1和从动齿轮4分别固接于五杆机构的曲柄ABDE上,各杆与x轴正方向的夹角以逆时针方向为正。

图 1 齿轮五杆机构
整个机构必须同时满足每个环路的运动条件,才能进行装配和运动。设各杆长度为ai(i=1,2,…,5),杆件对应的角度为θi(i=1,2,…,5)。
齿轮约束一般为
θ1-α=n(θ4-β)
其中:α、β分别为曲柄1和曲柄4的初相角;n为齿轮传动比。
当齿轮五杆机构处于标准位置(即α=0)时,则齿轮机构的特征曲线可表示为
θ4=θ1/n+β
(1)
五杆机构的环方程为
a1eiθ1+a2eiθ2-a5-a4eiθ4-a3eiθ3=0
分别向x和y方向投影,利用三角平方和关系消去θ3,可得五杆机构的输入—输出曲线关系式:

(2)
代入半角公式,令x2=tan(θ2/2) ,则上式可简写为
(3)
其中:
若要式(3)有实数根,则
(4)
此时方程的解为:
(5a)
(5b)
x2与θ2为一一对应的关系,每种机构构型具有唯一性。当Δ1>0 时,式(3)具有2个不同实根,对应着五杆机构的2种构型。当Δ1=0时,方程只有单解,对应着机构只有1种构型,且此时五杆机构处于奇异位置。当Δ1<0时,方程无解,表明在此参数下的机构无法连续运动。
将式(4)化简,可得到
Δ1=-4S1S2≥0
(6)
其中:
S1=(a5+a4cosθ4-a1cosθ1)2- (a2+a3)2+(a4sinθ4-a1sinθ1)2
(7a)
S2=(a5+a4cosθ4-a1cosθ1)2+ (a4sinθ4-a1sinθ1)2-(a2-a3)2
(7b)
S1=0和S2=0表示关节旋转空间的边界,也称为边界曲线或奇异曲线[14-15],边界曲线上的点表示五杆机构处于奇异位置,关节旋转空间内的点则表示五杆机构能运动到此位置。
1.2 齿轮五杆机构分支点识别
机构只有一个自由度,说明只要确定输入值便可得到整个机构的可行性。但分支点的存在导致机构仅在某一段角度区间中具有可行性,且齿轮五杆机构的分支点位于齿轮机构的特征曲线与五杆机构的关节旋转空间边界的交点处。
将式(1)代入边界曲线S1中消去θ4,令x1=tan(θ1/2),可得到
(8)

1)当Δ2>0时,方程有两个不同的解:
(9a)

(9b)
表明齿轮机构特征曲线与五杆机构的边界曲线S1存在两个交点,分别为机构分支点θ1[1]和θ1[2]。
2)当Δ2=0时,方程只有一个解,即机构只有一个分支点。
3)当Δ2<0时,方程无解,即齿轮机构与边界曲线S1无交点,即机构不存在分支点。
同理,将式(1)代入边界曲线S2消去θ4,代入半角公式x1=tan(θ1/2),可得到
(10)

1.3 齿轮五杆机构分支及子分支识别
对于齿轮五杆机构,必须同时满足齿轮机构和五杆机构的运动条件,才能连续运动。
可通过以下方法来识别齿轮五杆机构的分支和子分支。
1)满足式(1),则表示齿轮机构能连续运动; 满足式(4)则表示五杆机构能连续运动;只有同时满足这两个公式,齿轮五杆机构才能装配和运动。
2)式(1)表示齿轮机构的输入输出曲线,而式(4)表示五杆机构的关节旋转空间。齿轮五杆机构的分支为齿轮机构的输入输出曲线与五杆机构的关节旋转空间的公共部分,每一部分代表了一个分支。
3)分支点为齿轮机构的输入输出曲线与五杆机构的关节旋转空间边界曲线的交点。齿轮机构的输入输出曲线可由奇异点(死点和分支点)分成若干部分,仅满足式(4)的部分为有效分支,也是齿轮五杆机构的分支。
4)通过式(5)识别齿轮五杆机构的子分支。每个输入值θ1都可能对应着1个或2个θ2,即在每个分支中,每一个输入可能对应着1种或2种机构构型,也就是1个或2个子分支,子分支可通过式(5a)和式(5b)获取。当Δ1=0 ,每一个输入对应一个θ2值,机构只存在1种构型,即只有1个子分支;当Δ1>0 ,每一个输入对应2个θ2值,机构有2个子分支。
1.4 齿轮五杆机构分支纠正
要使齿轮五杆机构描绘出完整封闭的连杆曲线,机构必须连续平稳的转动,即齿轮五杆机构的分支要具有完全旋转性,需满足三点:1)五杆机构能连续运动;2)齿轮机构与五杆机构边界曲线无交点;3)齿轮机构所在位置完全处于五杆机构关节旋转空间内。
不具有完全旋转性的分支是含有运动缺陷的,会阻碍机构的连续运动,应当进行分支纠正,避免运动缺陷。所以在机构设计及轨迹综合过程中,将Δ1≥0、Δ2<0及Δ3<0作为约束条件,可防止分支点的存在,避免运动缺陷。
当五杆机构参数确定时,可得到其关节旋转空间及奇异曲线。因此,可通过改变齿轮机构的传动比n及初相角β来纠正分支。
2 计算机辅助设计软件框架
齿轮五杆机构的分支、分支点识别过程计算时间长,求解效率低。为了简化计算,可采用人-机对话的方式,将1.2及1.3节的识别过程通过计算机辅助软件来实现。通过QT creator软件搭建界面,设计一款可以自动识别齿轮五杆机构分支和分支点的计算机辅助设计软件,对给定参数的齿轮五杆机构分支、分支点进行判定,同时可以辅助纠正不具有完全旋转性的齿轮五杆机构分支,为机构设计提高效率。如图2所示,该程序流程主要分成以下几个部分。

图 2 程序运行流程
1)数据输入模块:为了方便用户根据五杆机构的关节旋转空间形状来纠正分支,将齿轮机构的参数设置放在主界面,用户可随时修改齿轮机构参数来纠正分支,五杆机构的连杆参数设置放在二级界面。
2)绘图模块:采用逐点扫描法,从左到右和从下到上,扫描显示区域内的每个像素点,并且参照图3的绘图逻辑,以PANTONE色卡为参照,赋予显示区域的每个像素点RGB值。
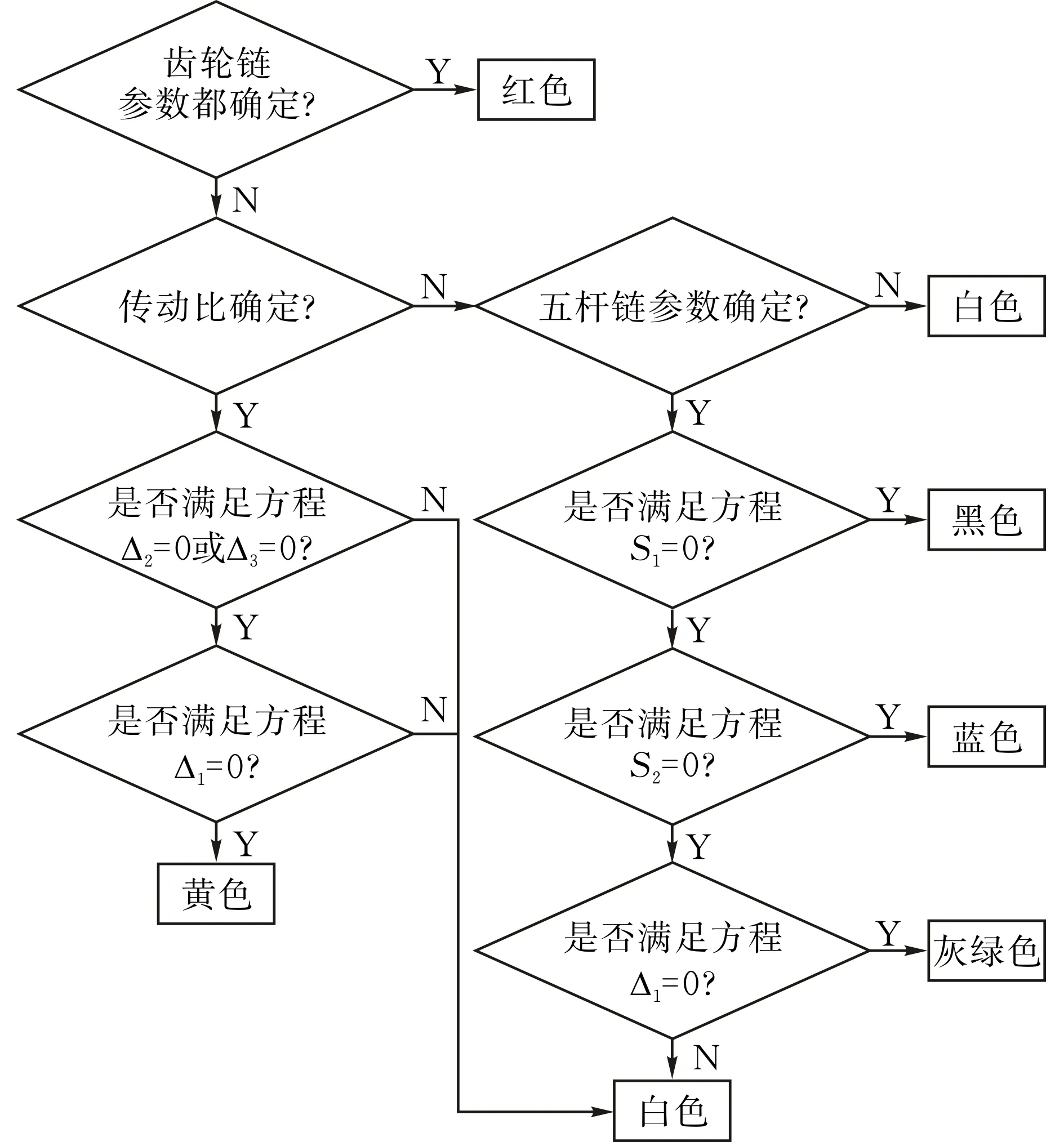
图 3 齿轮五杆机构程序绘图逻辑
3)显示模块:根据主界面的图像,可以调整图像的显示区域,根据需求可在主界面显示齿轮五杆机构所有分支点,并且可得到无运动缺陷齿轮五杆机构的极限初相角的值,最后将结果汇总到消息汇总框,方便用户查看和纠正。
3 特征识别过程
3.1 分支点识别过程
分支点为黑线与红线、蓝线与红线的交点,分别代表了五杆机构的二杆件BCD处于拉伸共线(S1=0)及重叠共线(S2=0)的状态。理论上两条线的交点数仅为1,但受软件绘图精度及曲线线宽等因素的影响,每个理论交点附近会存在多个实际交点,故软件中曲线线宽可由用户自行调节。为了减小误差,参考解析法中四舍五入近似取值法,交点坐标选取离末端交点最近的整数点。
3.2 极限初相角识别过程
极限初相角指的是齿轮机构所在直线与关节旋转空间的边界曲线(S1或S2)只有一个交点时得到的初相角,即分支只存在一个分支点的情况下的齿轮机构初相角。导入五杆机构参数,可得到五杆机构的关节旋转空间,用户需要根据关节旋转空间的形状在主界面中输入合适的传动比,在关节旋转空间内(Δ1≥0)能够搜索到与关节旋转空间边界曲线(S1或S2)只有一个交点的直线,并得到该直线的y轴截距,即为齿轮机构极限初相角的值。由于初相角的极限值涉及初相角的取值区间是否包含端点问题,程序在搜索时进行了取整,得到极限值只能作为开区间的端点。
4 软件界面设计
4.1 主界面说明
主界面包括预处理区、图像显示区、绘图功能区、结果显示区和消息汇总区等5个区域(图4)。

图 4 主界面
其中,预处理区包括调整显示区间与连杆参数设置区。调整显示区间默认为360°,用户可根据需要调整显示区间中X和Y的起始值,通过导入连杆参数可获取θ1和θ4的关节旋转空间。
图像显示区可显示齿轮五杆机构输入角θ1和输出角θ4的分支识别图。红色直线表示齿轮机构的输入输出曲线,黑色及蓝色曲线之间的灰绿色区域表示θ1和θ4的关节旋转空间,红色直线与黑色曲线、蓝色曲线的交点为分支点。
绘图功能区为用户的操作区。点击绘制特征曲线键,可得到依据用户输入的连杆参数绘制出五杆机构的关节旋转空间。用户可在识别框中输入传动比及初相角的值来识别分支及分支点。也可以根据得到的关节旋转空间的形状,输入合适的传动比来搜索初相角β的极限取值,通过改变初相角来纠正机构的分支。点击重新绘制图像键,可以清除齿轮机构所在直线,重新输入齿轮机构参数,识别分支及分支点。
结果显示区在图像下方。显示得到的β极限值和分支点,以表格的形式呈现,每一列的X,Y坐标对应一个分支点的坐标,X表示输入θ1的值,Y表示输出θ4的值,无分支点则不显示,并在消息汇总框里显示“无分支点”。
4.2 二级界面说明
在主界面点击连杆参数设置键,弹出如图5所示的连杆参数设置界面。用户可输入连杆参数,同时可以调节关节旋转空间的边界曲线线宽,数值越大,曲线越粗,分支点的误差越大,因此应尽量将线宽调节到千分位来减小误差。
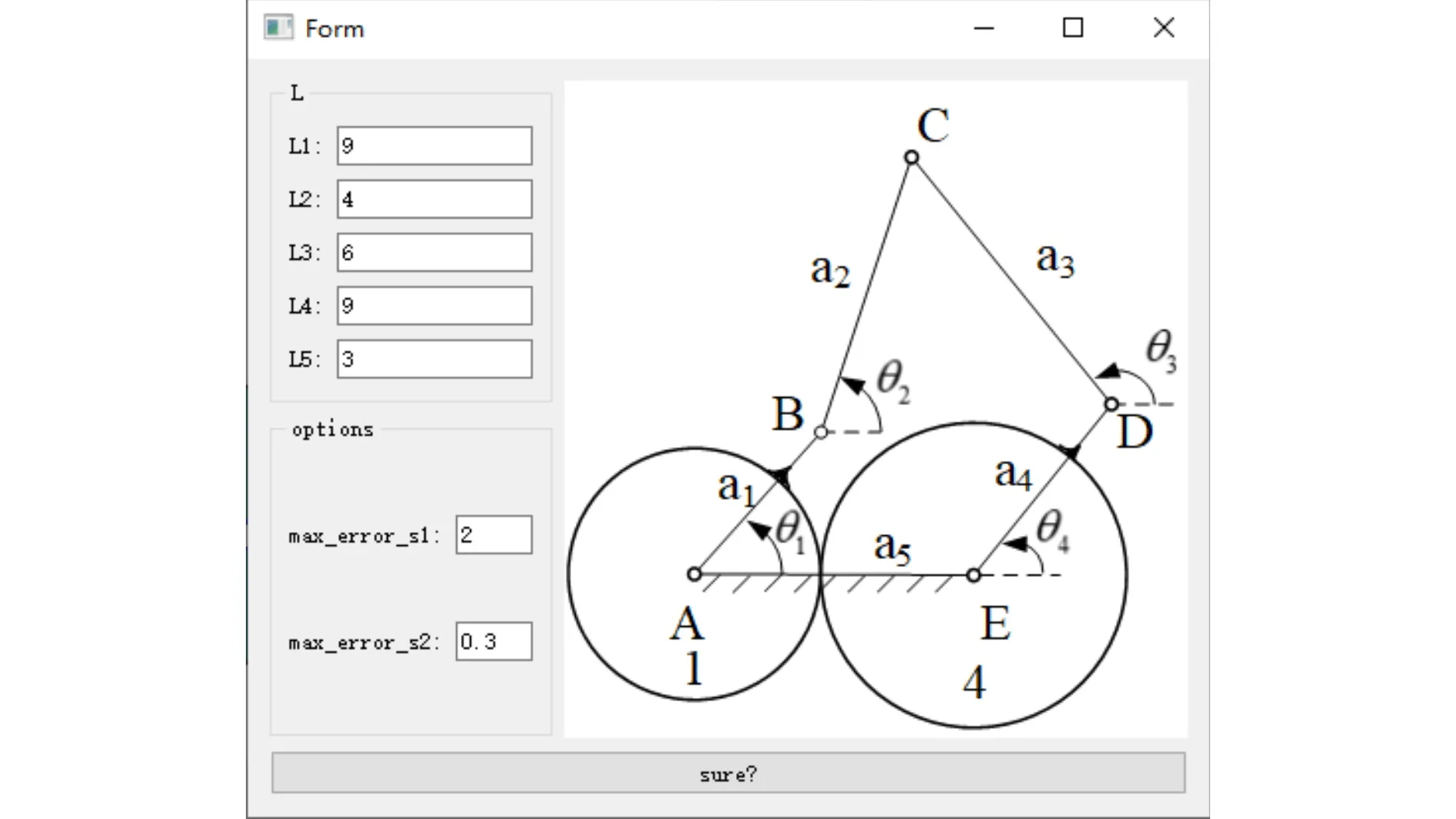
图 5 连杆参数输入界面
在主界面点击调整显示区间键,弹出如图6所示的调整显示区间界面。图中θ1与θ4分别代表绘图时θ1与θ4的起始坐标。默认以θ1与θ4的起始坐标开始的360°为一个区间,用户可根据需要通过调整θ1与θ4的起始值来调整图像的显示区间。

图 6 调整图像显示区间界面
5 计算机辅助设计软件实例
5.1 分支自动识别实例
依据图2所示的程序运行流程进行齿轮五杆机构的分支识别。
输入齿轮五杆机构参数(a1=7,a2=4,a3=6,a4=8,a5=8,n=-1,β=0),以θ1为输入,θ4为输出,经过调整得到图7所示图像,可得到分支点1.(-141°,141°)、2.(-35°,35°)、3.(35°,-35°)、4.(141°,-141°)。从显示的图像中,还可以得到机构的有效分支[-35°,35°]以及两个连续的分支[-180°,-141°]和[141°,180°]。
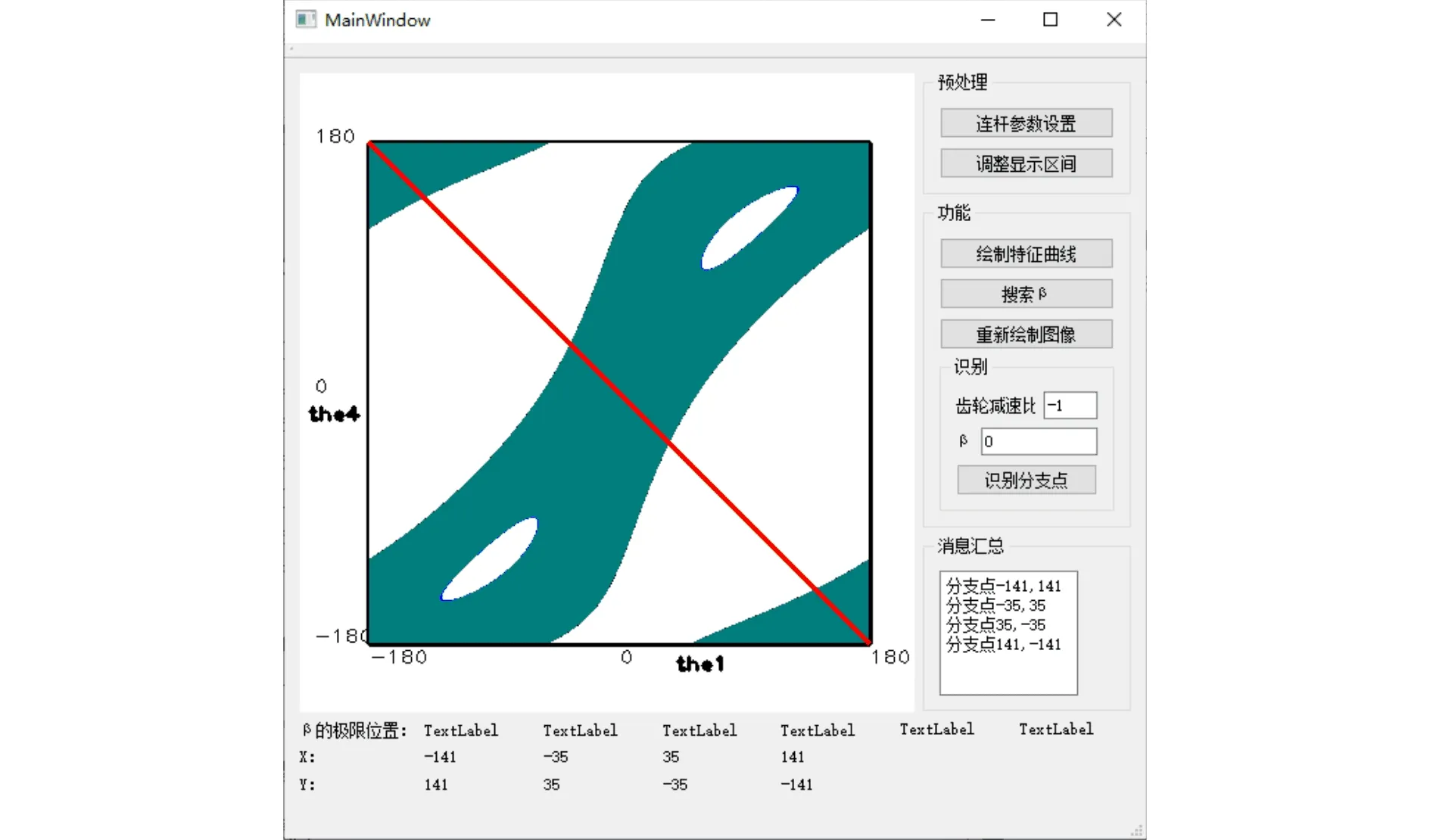
图 7 计算机辅助识别分支
5.2 辅助分支纠正实例
输入五杆机构的尺寸参数,可得到五杆机构的关节旋转空间。根据五杆机构关节旋转空间的形状,输入合适的齿轮机构传动比,搜索初相角β的极限值,根据极限初相角和图像确定初相角的取值开区间,在区间内选择合适的β值,可得到具有完全旋转性的分支,即机构无运动缺陷。
根据上述程序操作,输入五杆链的参数(a1=9,a2=4,a3=6,a4=9,a5=3),可得到图8所示的五杆链的关节旋转空间图,可看出其形状沿着直线y=x方向延伸,因此在齿轮减速比输入框中输入“1”,点击搜索β键可得到图9,可以得到β的极限值为-45°,-33°,-6°,6°,33°,45°。从图中可得到初相角β的取值范围为(-6°,6°),(33°,45°),(-45°,-33°)。从取值区间内任意选取一个值,如取β=40°,可得到如图10所示结果,可以看出得到的分支具有完全旋转性。
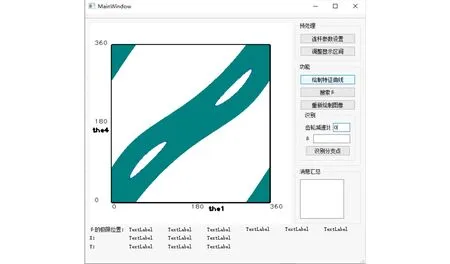
图 8 五杆链关节旋转空间

图 9 计算机辅助纠正分支

图 10 计算机辅助分支纠正结果
6 结论
1)利用判别式分析了齿轮五杆机构的分支点、分支及子分支识别过程。
2)结合QT creator软件,开发了一种齿轮五杆机构计算机辅助设计软件,在软件界面中直接观察到分支点坐标及极限初相角的值,简捷快速地实现齿轮五杆机构的分支点及分支的自动识别。
3)结合齿轮五杆机构进行实例分析,验证了该软件可通过调整齿轮链传动比n与初相角β的值,对具有运动缺陷的齿轮五杆机构进行分支自动纠正,得到具有完全旋转性的齿轮五杆机构。相对于一般解析法,利用计算机辅助设计软件识别分支及辅助纠正分支更加简单、快捷且直观,提高了机械设计效率。
