Z网络下新的推理算法在不确定决策中的应用①
2021-11-02涂成凤
张 最, 吴 涛,b,*, 涂成凤
(安徽大学a.数学科学学院;b.计算机智能与信号处理教育部重点实验室,安徽 合肥230039)
0 引 言
不确定决策是指充分考虑既有的不确定信息情况下,进行不确定性的推理,得到较为可靠的信息。对于不确定信息,Zadeh[1]于2011年提出了Z-number的概念,用来表示具有随机性和模糊性的不确定信息,但是不确定信息的推理较为复杂。针对这一问题,许多学者进行了研究,并且在处理不确定性过程中研发了很多不确定性推理技术,例如模糊推理、概率推理、Dempster-Shafer(DS)证据推理等等。模糊推理[2]是基于模糊集由不准确集得到不准确结论的过程;概率推理[3]是基于贝叶斯推理的不确定性推理方法,但这要依靠先验概率和条件概率;DS证据推理[4]是基于DS证据理论处理不能用概率表示只能用质量函数表示的“未知”信息。针对Z-number的不确定性推理,Jiang等[5]提出新的Z网络模型以及推理算法用来进行Z-valuation不确定性推理。基于Z网络模型,对Z-valuation不确定性推理过程进行一些改进,进而在决策过程中根据已知的信息进行改进后的推理,从而得到更加准确的信息,有利于决策人更好的进行决策。
1 基础知识
定义1[6]: (Z-number)Z-number是由有序的一对模糊数表示为Z=(A,R),第一个元素是不确定变量的实值函数,是对X在值上的约束,第二个元素是对第一个元素可靠性的测度。
定义2[7]: (离散Z-number)离散Znumber是一个有序的离散模糊集对,记作X是(A,B),其中A对随机变量X可能取的值进行模糊约束,它的隶属度函数为μA:{x1,x2,…,x m}→[0,1],B为对A的概率测度的模糊限制,其隶属函数是μB:{b1,b2,…,b n}→[0,1],b1,b2,…b n∈[0,1],可写为P(X是A)=B。而有序三元组(X,A,B)被称为Zvaluation,或者说Z-valuation等价于赋值语句X是(A,B)。
2 基于if-then规则下离散的Znumber的算法
假定两个Z-valuation信息,其中

假设“*”是一种运算,则X*Y=Z=其中Z是X和Y的运算结果,基于此,if-then规则下两个Z-number的算法就可划分为四个部分,A1和A2之间的值的算法,A1和A2之间隶属度的算法,B1和B2之间的值的算法,B1和B2之间隶属度的算法。基于Jiang等[5]的推理过程:

其中

A=A1*A2,B=μA·(pX*p Y),其中“·”仅仅描述隶属度和潜在概率之间的联系。p X和p Y受 限 制 于
(1)A的值可由…,x2*y s2,…,x s1*y1,…,x s1*y s2}计算,其中有些不同的x j和y k关于*的运算结果是相同的,即z i=x j1*y k1=x j2*y k2=…则隶属度μA可由

计 算,其 中min是 在μA1(x ja) 和μA2(y k a) 之间的取值,a=1,2…,而max是对
(2)考虑B1和B2的计算,其过程与潜在概率p X和p Y有关。X和Y的概率分布表示为{pX1,…}和{pY1,…},需 要 注 意 的 是,这 里p X j的表示X的第j组概率分布,Y和Z也是如此。每一个p X j和p Yk都有其相应的隶属度μ(p X j) 和μ(p Yk) ,其 中μ(p X j) 是μB1(b1j),min处理后的值再进行取值。μ(p Yk) 是μB2(b2k)。考虑到实际情况,p Z的隶属度计算如下:

也可写作公式

其中1≤j≤t1,1≤k≤t2。受限制于

(3)考虑Z-number限制部分b l的计算
①构建优化模型
输出Z-valuation信息的潜在概率信息的计算可以转化为一个优化模型,此限制基于线性相关方程:
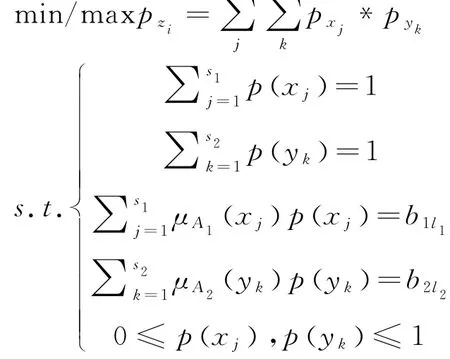
其中1≤l1≤t1,1≤l2≤t2,这里得到的仅仅是t1*t2组区 间概率 信 息[minp(z i),maxp(z i)],每一组区间概率信息({[minp(z1),maxp(z1)],…[minp(z s),maxp(z s)]},意味着有无限组概率分布,不利于最后限制部分的计算。基于此,可利用最大熵方法获得最可能的潜在概率分布。
②优化区间信息
随着优化模型和给定数据的变化,①中得到的区间不一定能够满足最大熵方法中的约束条件,需要优化区间信息。具体方法如下:
对于t1*t2组区间信息分别进行如下操作,以一组区间信息

然后将原来的区间可以改写为

最后令
得到新的区间
{[minp(z1),maxp(z1)],…[minp(z s),maxp(z s)]}
③建立最大熵模型
由此得到最可能的概率分布,模型如下:

④计算得到b l
通过③得到t1·t2组最可能的概率分布,通过公式可以得到b1,b2,…,b t,其中t=t1·t2
3 Z网络的结构以及算法
Z网络由两部分组成:结构G和参数θ。网络结构G是一个有向无环图,描述属性之间的依赖关系;参数θ量化网络,其中包括每个属性的条件概率表。Z网络的构建过程如下:找到整个研究系统中涉及的全部随机变量,将其绘制成有向图,如图2是一个简单的Z网络,其中圆代表随机变量,箭头表示依赖关系[9]。图2中有三类小结构,而且由这三类小结构就能构成所有的Z网络。如图1所示,三类小结构分别为结构1、结构2、结构3。接下来介绍一下这3种结构。

图1 (a)结构一(b)结构二(c)结构三

图2 简单Z网络
结构1
如图1(a)所示,X,Y,Z是三个Z-valuation信息,X和Y分别有一个箭头指向Z,代表由X和Y可以推出Z,箭头代表它们的推理关系,表示为p(Z|X,Y)。结构中X和Y是输入值,Z是输 出 值。推 理 过 程:X=(A1,B1),Y=(A2,B2),Z=(A,B)=X·Y

其中

首先如果p(z i|x j,y k)≠0,就说x j和y k可以推出z i,那么隶属度μA(z i)就可以由公式(1)计算,解释参考第二部分中隶属度的求法。
第二,从优化模型
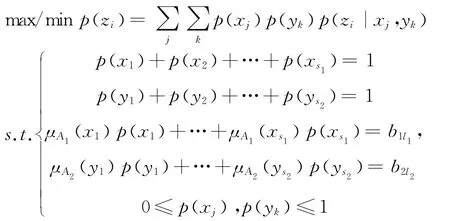
(其中i=1,2,…,s,j=1,2,…,s1,k=1,2,…,s2,l1=1,2,…,t1,l2=1,2,…,t2)得到p(z i)的区间值[minp(z i),maxp(z i)]。优化区间信息,具体步骤可见2中④,利用最大熵方法maxp(z i)log2p(z i)

得到t1·t2组概率分布p Zl,其中l=1,2,…,t1·t2,每组概率分布p Zl都是{p(z1),p(z2),…,p(z s)}的形式。而且每组有相应的隶属度μB(p Zl),由公式(2)计算。最后,得到了μA(z i)和p Zl,b l便可由公式(3)计算得到,其中的p(z1),p(z2),…,p(z s)是第l组概率分布中的概率,b l的隶属度就是μ(p Z l),即μB(b l)=μB(p Zi) 。
结构2
如图1(b),X,Y,Z是三个Z-valuation信息,X和Y,X和Z之间有一个箭头,这代表由X中的信息可以分别推出Y和Z中的信息,其中X是输入信息,Y和Z是输出信息。箭头代表因果关系,分别由p(Y|X)和p(Z|X)表示,推理过程:

其中A1,B1,A2,B2,A,B与结构一中的一样。
首先,如果p(zi|x j)≠0,则说明由x j可以推出z i,如果p(yk|x j)≠0,则说明由x j可以推出y k。其隶属度由公式(1)计算,其中输入信息只有X,故min只对不同的x j的隶属度取值,即max可省略。其次,我们可以利用两个优化模型分别得到p Y和p Z。

(其中i=1,2,…,s,j=1,2,…,s1,k=1,2,…,s2,l1=1,2,…,t1)由此得到区间信息,优化区间信息使用最大熵方法得到t1组概率分布p Zl和p Yl2,而μB(p Zl) 和μB2(p Yl2)由公式(2)计算。最后,计算出了μA(z i)和p Zl,μA2(y k)和p Yl2,那么可由公式(3)计算b l和b l2,其隶属度μB(b l)和μB2(b l2)就等于相应的μB(p Zl)和μB2(p Yl2)。
结构3
如图1(c),X,Y和Z是三个Z-valuation信息。X中的信息可以通过Y传到Z。其中X是输入信息,Z是输出信息。箭头代表因果关系,表示为p(Y|X)和p(Z|Y)。推 理 过 程:X=(A1,B1),Z=(A,B),其中A1,B1,A,B与结构1中的一样。
首先,如果p(yk|x j)*p(zi|y k)≠0,代表z i可由x j经y k推出,其隶属度可由公式(1)得到。其次建立优化模型
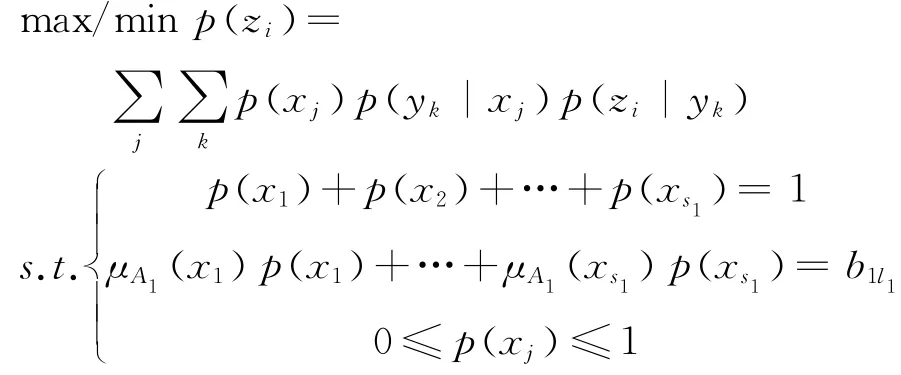
(其中i=1,2,…,s,j=1,2,…,s1,k=1,2,…,s2,l1=1,2,…,t1),由此得到t1组区间信息,优化区间信息使用最大熵方法得到t1组概率分布,相应的隶属度μB(p Zl) 由公式(2)计算。最后算出μA(z i)和p Zl,由公式(3)计算b l,其中p(z1),p(z2),…,p(z s)是第l组概率分布中的概率,隶属度μB(b l)就是μB(p Zl)。
4 实例分析
表格1

?
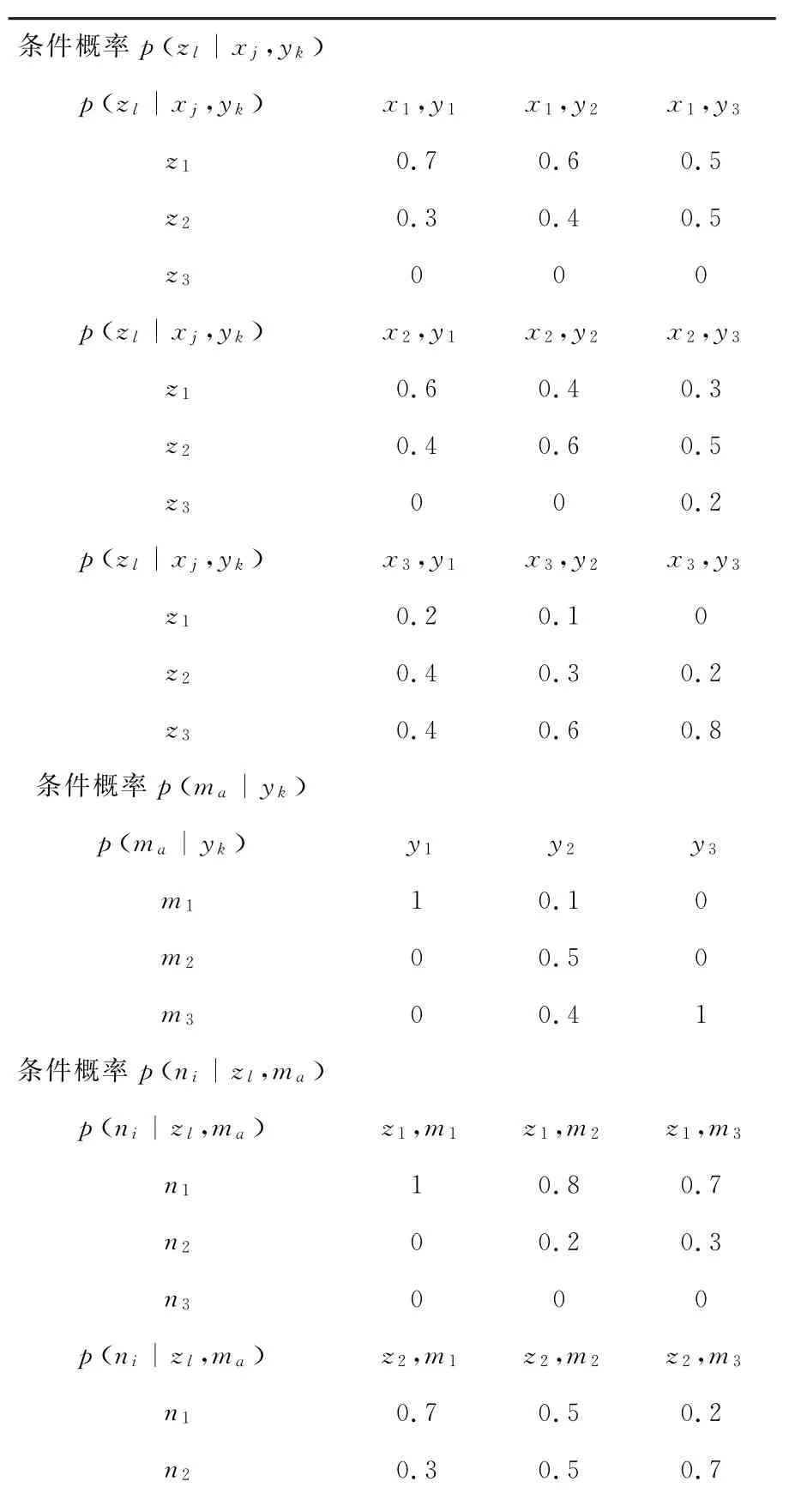
污染指数的确定是一大难题,利用Z网络及其算法可以实现。通过某地区的湿度和风力情况,结合Z网络模型判断其污染指数。现有一个三层Z网络,如图3所示,其中X,Y,Z,M,N都是Znumber,分别代表空气湿度(x1:低,x2:正常,x3:高),风力(y1:小风,y2:中风,y3:大风),天气(z1:晴,z2:多云,z3:雨),风沙量(m1:少量,m2:中等,m3:多),污染指数(n1:轻度,n2:中度,n3:重度)。其条件概率如表所示,输入专家评价的空气湿度(X,A1,B1)和风力情况(Y,A2,B2),其中

首先由推理算法可知,如果p(n i|m a,z l)·p(ma|y k)·p(z l|x j,y k)≠0,表示由x j和y k可推出n i,或者称污染指数可由空气湿度和风力推断出。由公式

能够计算

其次,根据Z网络的基础结构构建这个三层网络的优化模型:

基于此优化模型利用前面步骤得到四组区间值。优化区间信息利用最大熵模型得出p N:

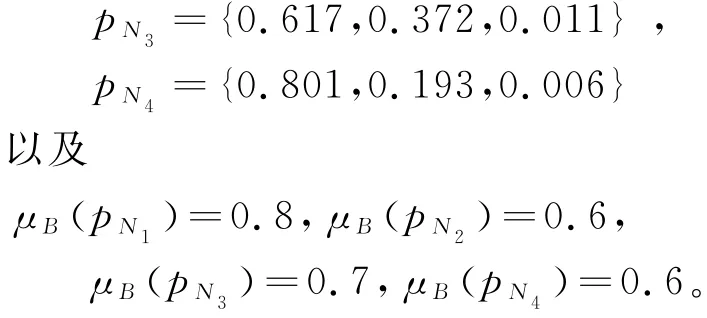
最后由公式(3)得到b l:
代表在专家评价的空气湿度和风力情况的条件下,推理出污染指数是轻度和中度的结果较高,其中B是A的可靠性,0.7974,0.7993,0.7989,0.7994是A的概率,代表着A较为可靠。
5 结 语
在Z-number和Z网络理论的基础上,对原来的推理算法作出了改进,实现了关于Zvaluation的不确定性推理。在通过最大熵方法来实现潜藏概率的获取之前,对由优化模型获取的区间值概率进行了优化,从而使得模糊不确定性推理变得更加完善,然后将改进后的算法运用到决策分析中。在这里考虑的情况并不全面,Z网络的结构还比较简单,改进后的推理算法并没有应用到更加复杂的Z网络中,针对实际中的各种问题,还需要继续研究。
