基于机器视觉的重合闸监控装置远方投退方法的研究*
2021-11-01陈柏青张美勇庄森杰
杨 雨,陈柏青,陈 伟,张美勇,庄森杰
(国网瑞安市供电公司,浙江 温州 325200)
随着社会经济发展,电网规模也飞速增长,当前电网的主要矛盾是客户日益增长的用电需求与电网公司设备相对落后的矛盾。如何高质量的保障用电可靠性,满足客户日益增长的用电需求,是供电企业提升优质服务,优化营商环境的一项重中之重的任务。那么,减少停电作业或进行带电作业是提升供电企业服务质量的有效措施之一[1]。
本文针对浙江电网瑞安公司辖区范围内变电站10 kV开关柜现状给出一种能在硬压板上进行远方投退重合闸的装置,该装置利用TCP/IP 协议和GPRS 通信网络技术,实现在特定条件下对变电站内重合闸装置进行远方投退和远程监控功能,能第一时间完成重合闸的投退工作,从而达到缩短操作时间和提高供电可靠性的目的,提升变电站智能化水平[2-4]。
1 现状分析
当前变电站内重合闸方式可分为可实现远方投退操作的软压板和无法实现远方投退的硬压板两大类。且辖区范围内仅有8 座变电站已实现重合闸远方投退功能,远远低于实际需求水平,严重影响智能变电站的发展。
因为重合闸操作主要还处于人工投退模式,且各变电站地理分布广、点散、操作量大且不定时,这样的运行方式严重影响了泛在电力物联网工程建设的推进。2019 年该公司重合闸操作量在不断地上升,每次操作需要运行人员到现场进行,路程遥远和人力不足的情况严重影响工作效率。一次重合闸操作时间=(车程+汇报+操作)时间,现阶段的运行方式无法满足当前电网发展要求,也不能在第一时间及时完成投退的操作任务。瑞安公司2019-01—2019-10 重合操作任务数量表如图1 所示。

图1 2019-01—2019-10 重合闸操作记录
2 远方投退监控装置的组成
电力安全工作规程规定,当电气设备操作后的位置检查主要通过以下三个方面作为判断依据:①操作人员使用该装置“选择—返校—执行—检查”的方式对重合闸硬压板进行操作时,重合闸压板会有通断切换;②保护装置上“充电完成”或“充电未完成”的图像作为反馈信号;③采集到的电压对比继电器模块的遥信信号,通过遥控操作和遥信反馈信号共同确认来实现远方操作是否完成[5]。
2.1 控制系统组成
基于机器视觉图像处理方法的重合闸硬压板远方投退监控装置的结构原理如图2 所示,嵌入式模块结构原理如图3 所示。硬件部分主要包括:工业摄像头、嵌入式处理器、工业摄像头的图像采集区域涵盖硬压板、保护装置显示屏的区域。根据工业摄像头采集到的图像对其进行处理,利用高斯滤波、锐化、边缘检测、直线检测等步骤,从背景中分离、检测出压板和显示屏的位置。判断压板状态是否“就位”。利用目标检测及目标跟踪算法,检测出压板当前的位置,并实时跟踪压板的位置状态,判断硬压板“开”“合”的相对位置关系,依据两者的角度运算,判断硬压板是否“断开”。能将检测、分析的结果传输给现场控制器,对重合闸监控装置的各个部件进行控制。软件部分包括:嵌入式LINUX/WINDOWS 系统、图像分析、处理、图像采集、TCP/IP、MODBUS 协议栈等[6-8]。

图2 远方投退监控装置结构原理图

图3 嵌入式模块结构原理图
操作人员通过身份认证进入服务器终端,通过TCP/IP协议和GPRS 通信协议对嵌入式模块下达投退指令,投退操作完成之后,利用摄像头采集遥控和遥信两个信号图片信息,经过图像处理分析来判断投退状态是否完成,以此来保障投退的准确性和安全性。
2.2 图像处理分析
图像处理作为收集遥信信号的一项软件处理算法,主要是通过远程投退监控装置的前端模块——工业摄像头,采集重合闸压板连接片和开关柜上测控装置画面的实时图像信息;嵌入式处理器将采集到的图像信息进行一系列的滤波、锐化、边缘检测、直线检测处理,从图像中读取重合闸压板连接片的位置和测控装置画面中的“通电完成与否”的状态信息[9]。
利用采集到的压板图片,进行高斯滤波预处理。具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。应用锐化工具可以快速聚焦模糊边缘,提高图像中某一部位的清晰度或者焦距程度,使图像特定区域的色彩更加鲜明。
因为重合闸连接片主要是线性图片,可以利用边缘检测算法提取线性特征,目的是标识数字图像中亮度变化明显的点。图像属性中的显著变化通常反映了属性的重要事件和变化,在边缘检测中利用Sobel 算子,它是一个离散的一阶差分算子,用来计算图像亮度函数的一阶梯度之近似值,公式为:
利用目标检测及目标跟踪算法,可以检测出重合闸压板的位置,并实时跟踪重合闸压板的状态位置;在拍摄区域内,利用用帧差法判断重合闸压板目前位置与原始位置的相对位置。主要是通过视频序列中连续两帧间的变化来检测静态场景下的运动目标,假设fk(x,y)和fk+1(x,y)分别为图像序列中的第帧k和第k+1 帧中像素点(x,y)的像素值,则这两帧图像的差值图像的公式为:

式(2)中,差值不为0 的图像区域代表了由运动目标的运动所经过的区域(背景像素值不变),又因为相邻视频帧间时间间隔很小,目标位置变化也很小。所以运动目标的运动所经过的区域也就代表了当前帧中运动目标所在的区域。
它的基本流程为:①利用公式(2)得到第k帧和第k+1帧的差值图像Diffk+1;②对所得到的差值图像Diffk+1二值化得到Qk+1,如公式(3)所示。

式(3)中:T为阈值。
为消除微小噪声的干扰,使得到的运动目标更准确,会对其进行滤波和去噪处理。
在目标跟踪方面采用基于Mean Shift 模型的跟踪方法,通过色彩或者灰度直方图分布的统计特性来描述目标特征。对初始帧图像中目标区域内所有的像素点,计算特征空间中每个特征值的概率,即建立目标模版。在以后的每帧图像中对可能存在目标的候选区域计算特征值,利用相似度函数度量目标模版与当前帧候选区域的相似性。通过求相似性函数最大值得到关于目标的Mean Shift 向量,这个向量就是目标从初始位置向正确位置转移的向量,根据此向量就可以找到目标的正确位置[10]。
用一个目标的颜色分布对图像中的目标进行描述,目标中心位于x0,则目标模型表示为向量,可得:
用y表示候选目标的中心,则候选模型表示为向量得到:

式(4)(5)中:n为颜色空间中颜色特征的个数;为核函数;δ为图像中点处的像素值(颜色值);u为颜色特征的特征值。目标跟踪可以简化为寻找最优的y,使得q与p(y)最大程度相似。
3 操作流程
当需要进行重合闸远程操作时,值班调度员向运维人员发布预令,运行人员根据调度指令开倒闸操作票,完成后向值班调度员申请正令。运维人员接受正令后,监护人和操作人根据操作票内容进行复诵操作。操作人根据监护人指令选择相应操作线路,双重名称核无误后,操作人和监护人分别输入操作编码,严格按照“两票”制度互相钳制和监督保证操作指令的正确,防止错误操作。远程操作流程如图4 所示,变电站典型跳闸改信号操作票如图5 所示。
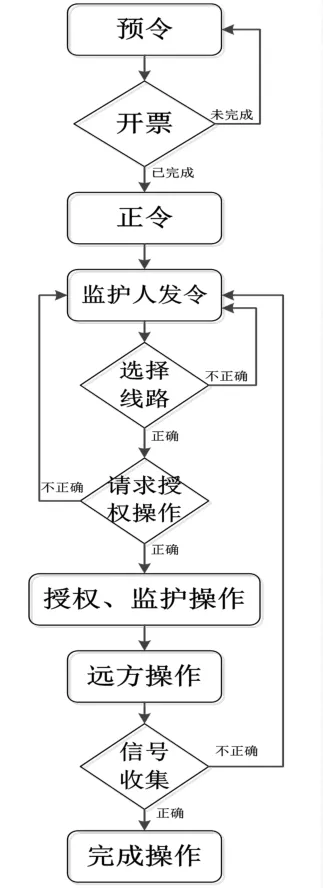
图4 远程操作流程图
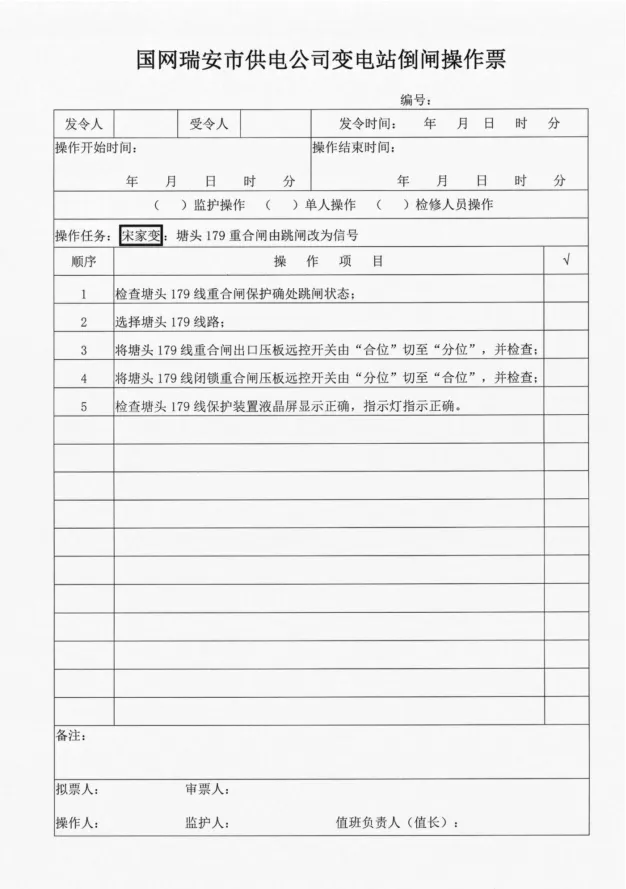
图5 重合闸由跳闸改信号操作票
4 总结
在变电站现有10 kV 开关柜上安装该远方投退装置,实现对硬压板的升级改造,使其满足自动化要求,通过机器视觉和图像处理方式实现了对重合闸硬压板的远方操作和监控功能。此功能的实现可以大大减少运维人员在重合闸操作上的人力、物力投入,特别是在抢修操作时,能第一时间完成任务,减少停电时间,提升供电可靠性,提高供电服务质量,优化营商环境,推进公司泛在电力物联网工程建设。
