单相电机变频光伏水泵在线参数识别方法研究
2021-10-29张翠苏建徽瞿晓丽马志保
张翠,苏建徽,瞿晓丽,马志保
(1.合肥工业大学光伏系统教育部工程研究中心,安徽 合肥 230009;2.合肥金泰克新能源科技有限公司,安徽 合肥 230009)
太阳能光伏水泵系统具有可靠性高、环保、无噪声等优点,在世界各地具有广泛应用,单相电机水泵具有结构简单、成本低的特点[1],在人口稀疏、缺水缺电地区具有很大的推广应用前景。
目前,对于单相电机两相三桥臂逆变器控制方面的研究主要集中在SPWM和SVPWM两种控制策略。以往的研究主要针对主副绕组对称情况,然而,在实际应用中,单相电机绕组多为不对称结构[2],不论采用SPWM还是SVPWM变频调速技术,首先需要对主副绕组进行区分,然后需要主副绕组的匝数比[1,3−4],以确定主副绕组通入不平衡电压的比例大小。然而,通常情况下匝数比是设计数据,一般生产厂家是不提供的[2,4−5]。若输入副主绕组电压比率不是电机绕组匝数比,则会产生椭圆形旋转磁场,影响电机的输出和寿命。因此对主副绕组进行区分并获得准确的主副绕组匝数比是必需的。目前对于不对称单相电机主副绕组进行区分和匝数比的测量方法研究不多[6−7],且这些方法需要一定的测试条件,而一般现场环境复杂、安装调试不方便,这些方法难以实际应用。
本文提出一种单相电机光伏水泵系统的在线参数识别方法。根据主副绕组电阻阻值差别,采用PWM开关压降补偿方法精确测量主副绕组电阻。根据两相电机SPWM匝数比误差对电机输出功率的影响特征,在线运行调整SPWM匝比系数,搜索电机实际匝比。该方法方便用于现场环境,准确可靠,仿真和实验验证了所提方法的正确性和实用性。
1 单相电机光伏水泵主电路拓扑及模型
1.1 单相电机光伏水泵系统主电路拓扑
单相电机光伏水泵系统主电路拓扑如图1所示,该系统由光伏阵列提供能量,经过两相三桥臂逆变电路,驱动单相电机水泵进行打水。其中,单相电机的定子绕组分为主、副两个绕组,两绕组连在一起的一端作为公共端。这种电机一般引出三根线,即主绕组(a)、副绕组(b)和公共端(c),这类电机主副绕组多为不对称结构,且副绕组匝数一般多于主绕组匝数。

图1 单相电机光伏水泵主电路拓扑Fig.1 Single-phase motor photovoltaic water pump main circuit topology
1.2 单相电机数学模型
单相电机与三相电机的最大不同点就是其定子绕组存在不对称性,导致主副绕组匝数、电感和电阻不同,与转子绕组的互感也不相同,即Nβ≠Nα,lβ1≠lα1,rβ1≠rα1,lmβ≠lmα,令主副绕组匝数比为1∶k(k=Nα/Nβ)。仿照三相电机模型可得单相电机在两相静止坐标系下的电压方程为[8−9]
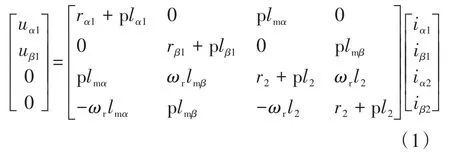
式中:uα1,uβ1分别为副、主绕组在两相静止坐标系下的定子电压;iα1,iβ1分别为副、主绕组在两相静止坐标系下的定子电流;iα2,iβ2分别为副、主绕组在两相静止坐标系下的转子电流;r2为转子电阻;l2为转子电感;ωr为电机转子电气角速度;p为微分分子。
2 单相电机主副绕组识别
电机的变频驱动,首先需要知道主副绕组,以此确定施加电压规则。主副绕组的识别机理主要是依据绕组电阻大小进行区分,电阻小的一般为主绕组,大的为副绕组,如果相同,则基本是对称绕组,可以不分主副。主副绕组和电机端口的区分采用直流电压电流激励测量电阻方式。在电机静止时,对单相电机各端口之间分别施加合适的直流电压或直流电流,根据电压和电流计算电阻,以此判断主副绕组和端口。
如图1所示,分别测量Rab,Rac,Rbc;ab两端电阻Rab最大,c端可确定为中心点,根据Rac和Rbc大小即可判断主副绕组和a,b端口。
以上主副绕组和端口的识别依赖于变频器对电阻的测量精度,由于变频器含电机电流传感器,无电机电压传感器,其无法对电机端口电压进行直接测量,一般只能依靠直流母线Udc电压传感器,通过PWM占空比D进行估算,即输出电压Vo=DUdc,由于直流激励电压很小,桥臂开关管压降及死区占比较大,这样电压精度会受到很大影响,直接用电压估算方式难以保证绕组电阻测量精度,进而影响主副绕组识别。本文采用文献[10]方法,在同一端口如ab两端分别注入电流Iab1,Iab2,以Rab及电压误差 Udn固定不变为原则,可得以下两式:

式中:Uab1,Uab2分别为注入电流Iab1,Iab2时所对应的端口电压;D1,D2分别为两次注入电流时所对应的PWM占空比。
将式(3)与式(2)相减,求解方程获得实际Rab值如下:

3 单相电机主副绕组匝数比识别
在单相电机的变频控制中,在区分主副绕组的前提下,需要知道主副绕组匝数比,以此确定单相电机两相运行SPWM平衡系数,使电机运行在圆形旋转磁场下。为保持电机的恒磁通调速和磁场的圆形旋转,要求主绕组的v/f为定值且主副绕组电压幅值满足匝数比的关系[1,5]。
一般在额定频率下,对应的主绕组电压为额定电压,在光伏水泵变频系统中,如要保证频率范围内圆形磁场需要,直流母线电压应同时满足主绕组和副绕组交流电压变化需要,k大于1,意味着副绕组额定电压会大于主绕组,直流母线电压Udc需要注意提高,以满足副绕组变频电压需要[11]。
3.1 主副绕组电压比例误差与功率脉动
定义主副绕组电压比例误差为主副绕组电压比值与主副绕组匝数比之差,记为εam。根据上文单相电机电压平衡方程,为了方便计算,不妨令 A=rα1+plα1;B=plmα;C=rβ1+plβ1;D=plmβ;E=ωrlmβ;F=r2+pl2;G=ωrl2;H=−ωrlmα;由式(1)可知功率P可表示为
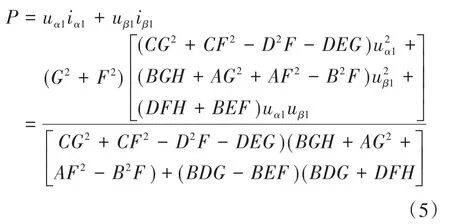
设 uβ1=UMsin(ωt),uα1=UAcos(ωt)(UM,UA分别为主、副绕组所加电压的幅值,ω为所加电压角频率),代入式(5)可得:
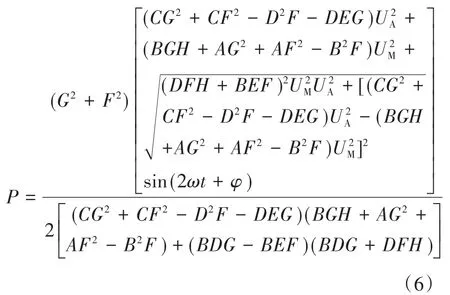
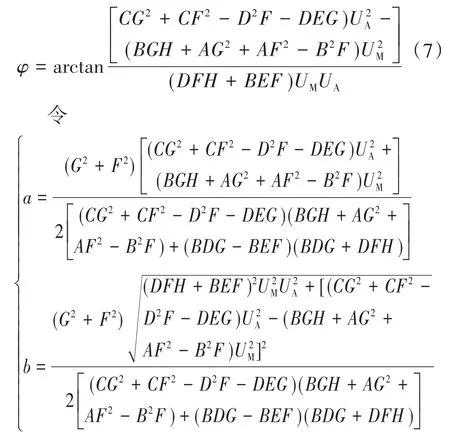
代入式(6)得:

由式(5)~式(8)可知,当单相电机主副绕组对称时,A=C,B=D,E=−H,此时:
若发对称电压,即UM=UA,计算b=0,此时功率P=a,表明输出功率为一个无脉动的定值;若UM≠UA,功率P含2倍频功率脉动,且随着主副绕组电压差的增加而增加;当单相电机主副绕组不对称(设匝比为k)时,由文献[12]可知,电机对称运行时,漏感很小可忽略不计,可得 lα1=k2lβ1,lmα=klmβ,lα1=ΛδNα2+lsα1,lβ1=ΛδNβ2+lsβ1,其中 Λδ,lsα1,lsβ1分别为气隙磁路磁导和主副绕组漏感。进而得出A=rα1+k2plβ1,C=rβ1+plβ1,B=kD,H=−kE,设 UA=N·UM,此时
当电机对称运行时,N=k,b有最小值:
输出功率P仍然含2倍频的正弦脉动功率,主要是由主副绕组电阻差异引起,总之,当输入副主绕组电压比值满足匝数比的关系时,输出功率脉动最小。
为了分析主副绕组电压误差对输出功率脉动的具体影响,本文在Matlab中搭建单相电机功率脉动测试电路模型。电机参数为:额定功率1 500 W,额定电压 220 V,rα1=2.92 Ω,rβ1=2.02 Ω,r2=5.74 Ω,lα1=0.255 H,lβ1=0.196 2 H,l2=0.254 3 H,lmα=0.217 H,lmβ=0.190 3 H;k=1.14。仿真条件为:负载转矩设置为额定转矩的25%,频率变化范围为25~50 Hz,主副绕组电压比例系数变化范围为0.83~1。使用Matlab的数据处理功能对仿真结果进行处理,处理结果如图2所示。
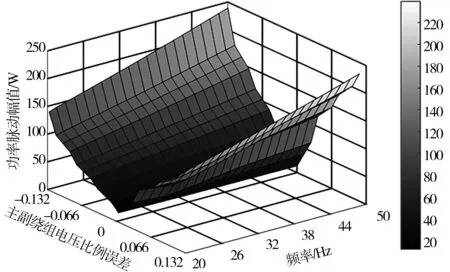
图2 不同εam条件下输出功率波动幅值Fig.2 Amplitude curve of output power fluctuation under different εamconditions
根据仿真结果可知,频率不变时,随主副绕组电压比例误差的增加,输出功率脉动幅值也随之增加,最大可达231 W;主副绕组电压比例误差不变,随着频率的增加,输出功率脉动幅值呈线性增长,电压比例误差越大,增势越陡。由此可知,选择合适的主副绕组电压比例系数是保证输出功率平稳运行的关键。
3.2 主副绕组电压施加规则及在线匝数比确定方式
单相电机主副绕组的电压施加规则是其主副电压比等于1/k,且满足在额定频率时,主绕组电压为额定电压。在光照强度满足一定功率条件下,可以进行主副绕组的识别判断,并可以启动水泵运行,在运行中一边稳定光伏阵列电压,一边进行匝数比的识别,同时也确定了主副绕组电压比例关系。
根据前述单相电机运行功率脉动与电压比例误差关系特征,可以确定如下方式有效,即在频率不变条件下,通过主副绕组电压比例系数调节搜索,可以实现最小功率脉动运行,此比例系数kam即为最佳电压控制比例,k=1/kam也可以作为匝数比参数。该控制与识别框图如图3所示。
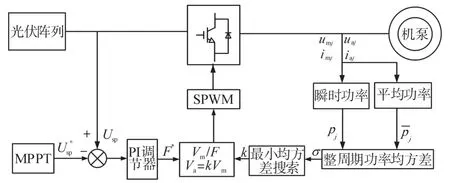
图3 单相电机在线匝比搜索控制框图Fig.3 Block diagram of online turn ratio search control for single-phase motor
由图3可知,MPPT模块完成系统最大功率电压点的搜索,输出阵列电压给定值U*sp,系统通过调节逆变器输出频率稳定阵列电压Usp,在某一运行频率下,给定的主副绕组电压初始值相同,即主副绕组电压比例系数为1。运行中,如果载波比为n,则采集整周期n个点的主副绕组电压、电流值为umj,uaj,imj和iaj(j=1,2,3,…,n)。计算瞬时功率、平均功率为
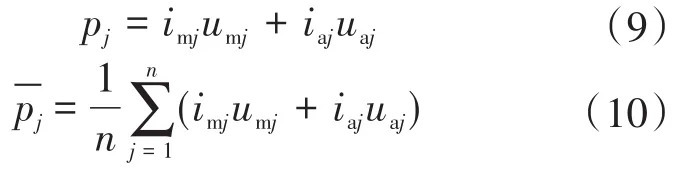
进而得出功率均方差为

功率均方差最小调节模块通过调节主副绕组电压比例系数完成均方差最小值搜索,实现输出功率脉动最小,确定主副绕组最佳控制比例kam,进而确定主副绕组匝数比k。
4 仿真与实验验证
4.1 仿真结果
为验证本文所提出的不对称两相电机的参数识别方法的正确性,在Matlab/Simulink环境中进行仿真测试,仿真所用电机参数如上文所述。
主副绕组电压比例系数初始值设置为1,图4给出了频率为50 Hz时输出功率变化波形;从图4中可以看出,输出功率脉动逐渐变小,慢慢收敛为一个稳定的值,此时对应的副主绕组电压比为1.138,与实际匝比1.14相差不大,表明该匝比识别方法的正确性和精确性。
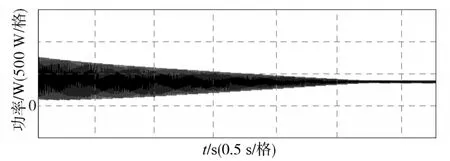
图4 单相电机匝比识别输出功率波形Fig.4 Single-phase motor turns ratio recognition output power waveform
4.2 实验验证及结果
考虑实际单相电机与理论模型可能存在差异,首先进行开环条件下的功率脉动特性测试及分析,以验证理论分析及仿真结果,实验室搭建单相电机水泵变频驱动测试实验平台,实验仪器设备及参数配置如下:功率分析仪WT3000一台;电压电流传感器各一个;1 100 W单相电机水泵一台;水泵变频器2.2 kW一台,开关频率设置为3 kHz;单相电机额定功率为1 100 W、额定频率50 Hz、额定电压220 V、额定电流8.6 A、额定转速1 500 r/min。

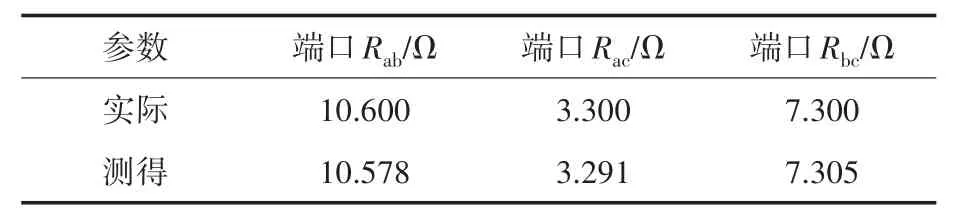
表1 1 100 W单相电机各端口电阻测量结果Tab.1 1 100 W single-phase motor resistance measurement results of each port
鉴于功率输出波形是规则图形,取功率脉动幅值为峰峰值的1/2,平均功率为最大功率与最小功率和的1/2,定义功率脉动相对误差为功率脉动幅值与其平均值之比。表2给出了不同频率下输入不同副主绕组电压比例系数时的功率脉动相对误差;从表2可以看出,同一频率下,功率脉动相对误差存在最小值且随着频率的增大,功率脉动相对误差越小,50 Hz时最小,表明在同等条件下,单相电机在50 Hz时功率脉动相对误差最小,运行状态最佳。图5为50 Hz时部分输出功率波形。从表2和图5可以看出,输出功率脉动最小时,功率脉动相对误差为6.8%,表明输出功率脉动仍然存在,主要是由不对称单相电机主副绕组电阻存在差异引起,与上文理论分析结果基本一致。取不同频率下功率脉动相对误差最小时所对应的副主绕组电压比例系数并计算平均值为1.292,将1.292作为匝比。
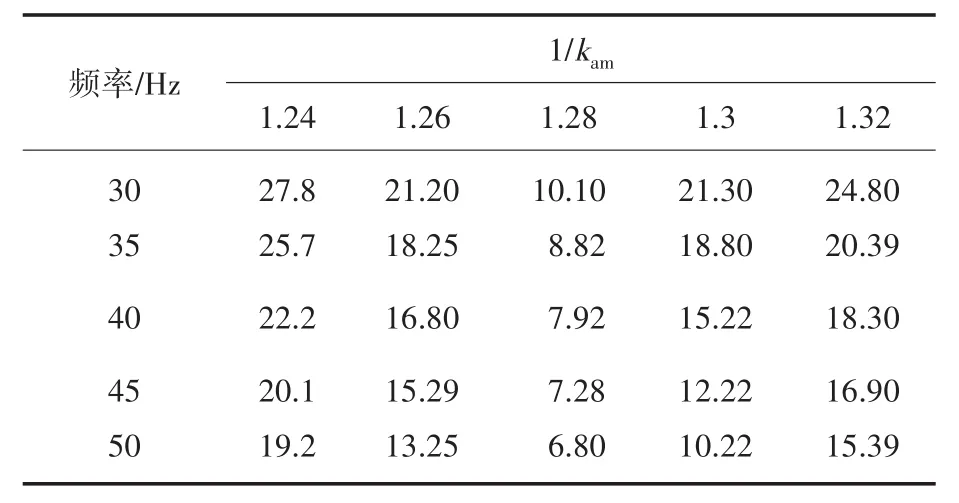
表2 不同频率、kam时,功率脉动相对误差Tab.2 Relative error of power ripple at different frequencies and kam %
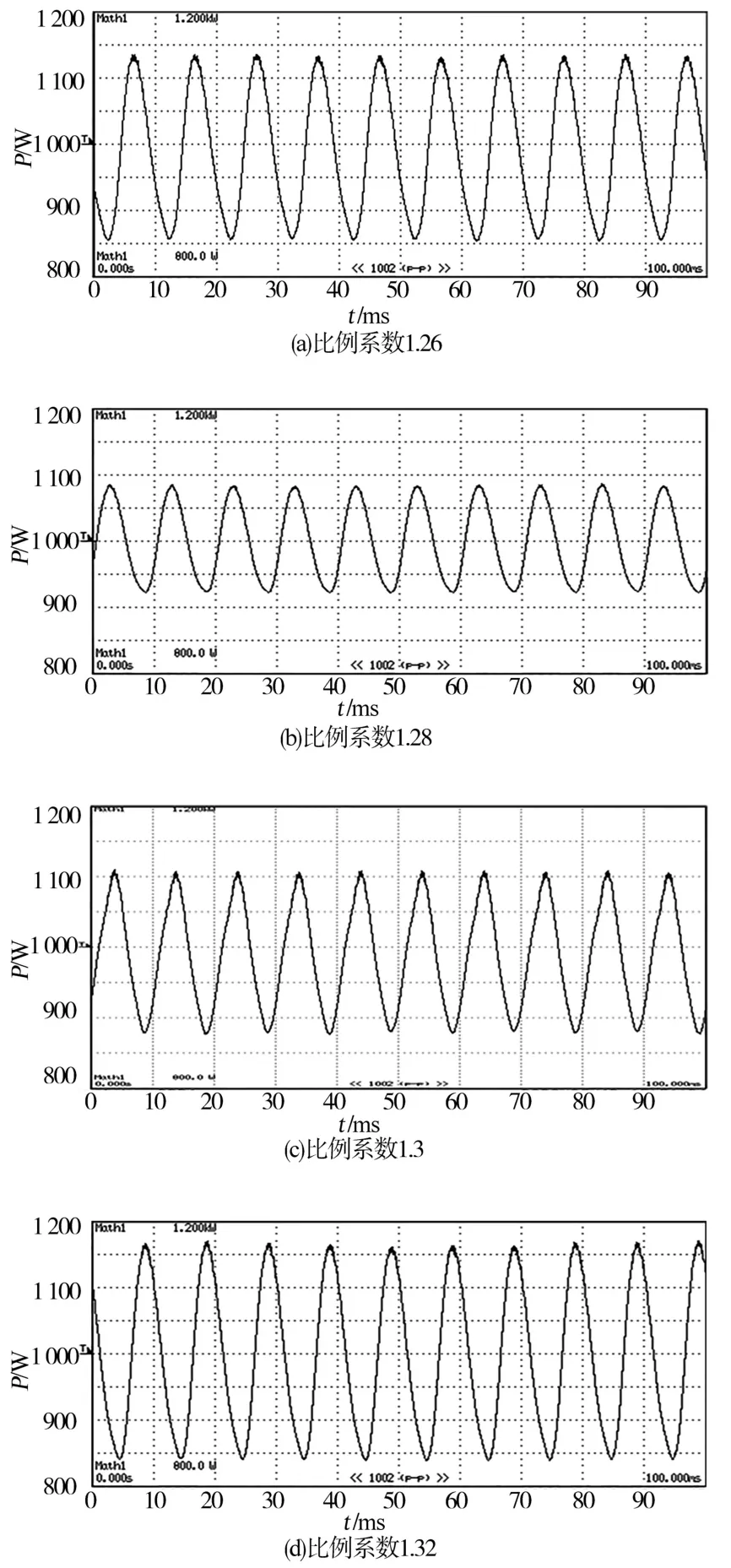
图5 频率为50Hz,副主绕组电压比例系数不同时的输出功率波形Fig.5 The output power waveforms when the frequency is 50 Hz and the sub-main winding voltage scale factor is different
将本文匝比测量结果和文献[13]匝比测量结果分别用于单相电机光伏水泵系统,满载运行时,其水泵出水流量分别为13.7 m3/h和13.2 m3/h,表明本文匝比测量的精确性和可行性。
5 结论
本文提出的单相电机光伏水泵在线参数识别方法可以方便在现场运行中实现单相电机的主副绕组和匝比参数识别,主副绕组识别采用逆变器施加绕组激励直流电流及PWM开关压降补偿方法,可以精确测量单相电机主副绕组电阻,进而实现主副绕组端口判断。研究并分析了主副绕组电压比例误差对单相电机电磁输入功率的影响特征,提出的在线最小功率脉动搜索法,可以实现不对称单相电机的匝比测量,进而实现电机运行中的主副绕组电压频率最优比例控制,获得最优运行效率。进行了详细仿真和实验验证,实验结果表明了该方法的可行性和有效性。
