冷连轧过程中机架间张力控制研究
2021-10-29田敬刚
田敬刚
(山东钢铁集团日照有限公司 山东日照 276800)
1 前言
冷轧带材的生产通常包括退火、酸洗、冷轧和平整轧制等工艺过程。冷轧带钢是金属制造和加工领域中最重要的工序之一。冷连轧机是一种冷轧工艺,通过使用多个不可逆机架实现带钢厚度减薄。该工艺的生产产品可应用于食品包装、汽车制造、家用电器等行业。因此,轧制新技术的改进和发展已成为研究人员、工程师和制造商的重要研究方向。
张力控制是冷连轧最重要的工艺参数之一,改变辊速可以稳定带间张力,带间张力应保持在可接受的水平[1]。张力瞬间的变化可能会导致轧机发生剧烈的物理破坏性故障,在这种情况下,带钢张力降至零,或者带钢撕裂。
现在已经开发出各种先进的方法来分析和控制轧钢机,有一些关注点集中在冷轧机的张力控制问题上,冷连轧过程模型中存在大量的不确定性和扰动,因此,冷轧控制策略必须具有鲁棒性[2]。为提高冷轧机张力控制水平,提出了两种先进的鲁棒控制系统。首先,针对五机架冷连轧张力系统,推导了具有参数不确定性的全机架状态空间描述。考虑带材厚度、杨氏模量、前滑差和速度执行器时间常数的变化,建立了结构不确定性模型。并利用H∞控制器方法和综合法设计了鲁棒控制器[3-4]。仿真结果表明,与传统控制器相比,鲁棒控制器具有更好的鲁棒性和抗干扰性能。
2 冷连轧张力概述
张力控制是冷连轧中的重要控制参数,张力会影响轧制产品的多个性能指标[5]。由于目前连轧多采用大张力轧制控制模式,合理的张力控制方式,有利于轧制的稳定,也是带材板型与轧制质量的重要保证[6]。张力的合理控制可以防止带材的跑偏,也可以降低金属的变形抗力,还能改善带材的平直度与调节各电机的负载分配等[7]。
在冷连轧中,带钢通过每对工作辊,工作辊由一个大直径的辅助辊支撑。在现代带钢冷连轧机各机架间均设置有张力监测仪,使机架间带钢的张力在允许范围之内保持恒定,为了达到良好的张力控制,采用张力计辊测量张力[8-9]。图1显示了传统的张力和速度控制。输入到机架1处的带钢速度与机架i输出处的带钢速度之间的差异意味着张力的变化[9]。传统控制器的结构通常是基于单输入单输出控制回路,为了提高张力控制的性能,打破了传统的张力控制方法,提出了基于鲁棒带材张力的先进张力控制策略,采用微调轧辊的方法,图2为张力控制系统的结构示意图。

图1 传统张力控制原理图
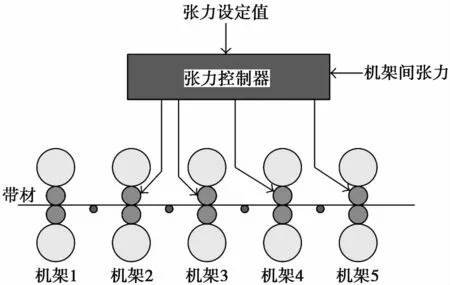
图2 最新的张力控制系统的结构示意图
3 鲁棒张力控制器设计
针对1700五机架串联轧机张力控制系统,为了实现设计的要求,引入了开环和闭环系统互连,设计了鲁棒控制器。鲁棒张力控制器设计的目的是在存在扰动和不确定性的情况下实现和保持机架之间的张力。闭环控制系统框图,如图3所示,包括反馈和控制器,以及反映与性能要求相关的模型不确定性和加权函数。在图3中,带虚线的矩形表示张力传输矩阵G。矩形内部是张力系统的模型H和不确定性矩阵Δ,d是系统扰动向量,定义输出加权向量为ep、控制加权向量为eu。

图3 鲁棒控制器的控制框图
一般来说,加权函数将用于满足设计,找到合适的加权函数是鲁棒控制器设计的关键,通常需要反复尝试和试验。通常性能加权函数为低通滤波器和控制加权函数是高通滤波器[10]。参考设计经验,带入相关参数可得到加权函数如下:

4 仿真分析
比较鲁棒控制器的稳定性和时域响应。由于所考虑的不确定性是结构化的,因此需要对鲁棒稳定性和性能进行验证。如果不确定性是非结构化的,则鲁棒稳定性和性能不会保持,这表明应该进一步了解不确定性的信息,所以通过对机架3和机架4之间的钢带张力进行了仿真,模型示意图如图4所示。
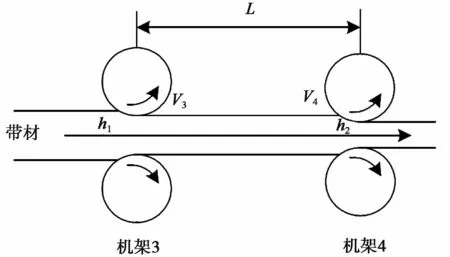
图4 两机架模型示意图
以某钢种的轧制数据作为仿真参数,板宽B设置为1500mm;入口带钢厚度h1为1.7mm,出口带钢厚度h2为1.2mm,机架间距L为5000mm,摩擦系数设置为0.07,轧机刚性系数为4700kN/mm,机架的弹性模量取2.06×105N/mm2。
在轧制过程中,张力的设定值很重要,张力过小板形得不到保证还可能跑偏;张力大会增加功率损耗还可能使带宽变窄,有拉断的危险。因此,根据实际情况,按照下式设定张力值为40kN[12]。

4.1 控制器稳定性
通过仿真得出控制器的频率响应如图5所示,可以看出此控制器的具有较好的鲁棒稳定性,可以用于实现系统的稳定控制,保证带材轧制的质量。

图5 控制器的频率响应
4.2 张力时域仿真
设定张力值为40kN,在与扰动信号的瞬态响应下,仿真得到实际张力值如图6所示,可以发现设计的控制器具有很好的的瞬态响应,超调量较小,可以保证张力值的稳定。

图6 控制器的张力时域响应
5 结论
在冷轧中,应控制带钢张力,以提高产品质量。针对五机架冷连轧机,设计了参数不确定性扰动的张力控制器。在存在不确定性和扰动的情况下,利用所提出的鲁棒控制器获得张力控制。为了证明控制器的闭环性能和鲁棒性,同时使控制器的实现更可靠,通过仿真进行了验证,此控制系统实现了张力控制的鲁棒稳定性。