USV复杂水域环境综合感知技术
2021-10-28马赛男邵汉东何旭东
马赛男, 邵汉东, 王 晨, 何旭东
(浙江嘉蓝海洋电子有限公司,浙江 舟山 316021)
0 引 言
无人水面艇(Unmanned Surface Vessel, USV)在水质监测、水文信息监控采集、信号中继、海底扫测及电缆管道绘制、海上救援等方面发挥着重要作用。由于USV模式多样化、作战行动灵活化、艇体结构隐蔽化、作战人员零伤亡、网络作战中心化等优势,使其越来越受到世界发达国家海军的关注。
USV将自身所处的工作环境和状态实时传递至岸基和工控机的过程就是环境感知。其是USV自主航行和避障决策任务的技术基础,是USV主要关键技术之一。国内学者已对提高USV的环境感知作了很多研究。李小毛等[1]提出一种基于3D激光雷达的障碍检测算法,即将一个周期内的3D激光点云投影至2.5D栅格地图中,对障碍物进行聚类分割;对栅格中的原始点云数据进行特征提取, 并用卡尔曼滤波实时跟踪。王博[2]从光视觉角度展开研究:一是基于USV的水面图像预处理,主要包括水面图像稳像研究及去雾增强研究;二是对水界线进行检测;三是利用光视觉目标检测;四是提出水面目标跟踪方法。姚旭洋[3]对双目立位视觉的立体匹配环节进行改进优化,可更加快速准确地获取目标深度,并对水上目标的识别算法展开研究。因此,环境感知是USV自主航行和避障决策、任务的技术基础,为USV的安全航行提供保障,文中将重点介绍USV的环境感知技术。
1 多传感器数据融合技术综述
USV所处海洋环境复杂,海面目标检测需要考虑气象、地理、海面非线性随机变化等诸多环境因素,为确保USV能够高效地完成救援任务,需对视觉图像信息、海事雷达图像、激光雷达图像等所包含的距离数据进行多传感器融合。多传感器融合技术通过对多类同构或异构传感器数据进行综合(集成或融合)获得比单一传感器更多的信息,形成比单一信源更可靠、更完全的融合数据,使用多传感器数据融合扩展空间观测范围。
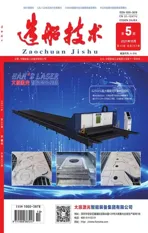
根据各传感器探测障碍物能力实行不同数据处理方法,不同传感器的优缺点如表1所示。图1为环境传感器海面检测范围。
表1 不同传感器的优缺点

图1 环境传感器海面检测范围示例
1.1 海事雷达障碍物识别技术
海事雷达是船舶安全航行非常重要的设备,主要有厘米波雷达和毫米波雷达,工作频率主要在X、S、C、Ka频段。船舶可安装双频段雷达,比如X和S频段可以配合使用。
(1)雷达距离探测原理
散射体受到雷达电磁波照射后,因其散射性会产生回波。散射功率的大小与雷达发射功率、距离及散射体散射特性有关。雷达距离方程的2种基本形式如下:
(1)
(2)
式(1)~式(2)中:Rmax,1和Rmax,2分别为2种方程形式下散射体至雷达的距离;P1为雷达发射功率;σ为散射体有效反射面积;Aγ为雷达接收天线的有效面积;λ为波长;Si,min为最小可检测信号功率;G为雷达天线增益。

(2)小目标雷达散射截面积精确测量
为了验证海事雷达的障碍物识别技术,选择0.63 m×0.31 m(长×宽)、面积为0.195 3 m2的一块钢板作为验证对象,进行小目标雷达散射截面积(Radar Cross Section, RCS)精确测量。
雷达至海面距离约1.5 m,钢板垂直于雷达发射波,分别在不同的量程下进行论证,如图2~图4所示。
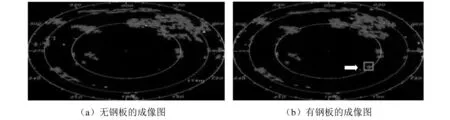
图2 雷达在116 m量程下对钢板的成像图
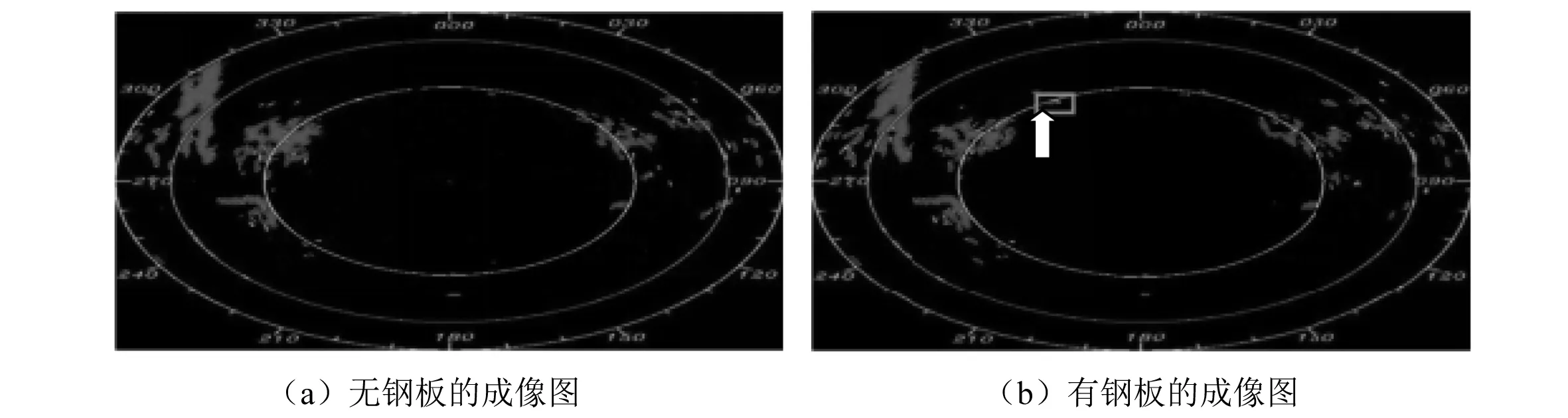
图3 雷达在232 m量程下对钢板的成像图
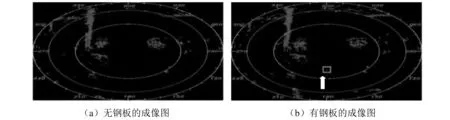
图4 雷达在464 m量程下对钢板的成像图
通过雷达扫描图对比可知:对面积小于0.2 m2的钢板,雷达使用3个不同的量程进行测试,并均检测出钢板的具体方位。由此可知,基于成像抽取的小目标RCS精确测量技术实用且可靠。
1.2 激光雷达障碍物检测技术
激光雷达具备360°扫描范围,探测距离达百米级,通过采集和解析激光点云数据,能够获取USV近距离范围内的运动或静止目标,辅助USV完成避碰功能。激光雷达经过扫描得到点目标,如图5所示。
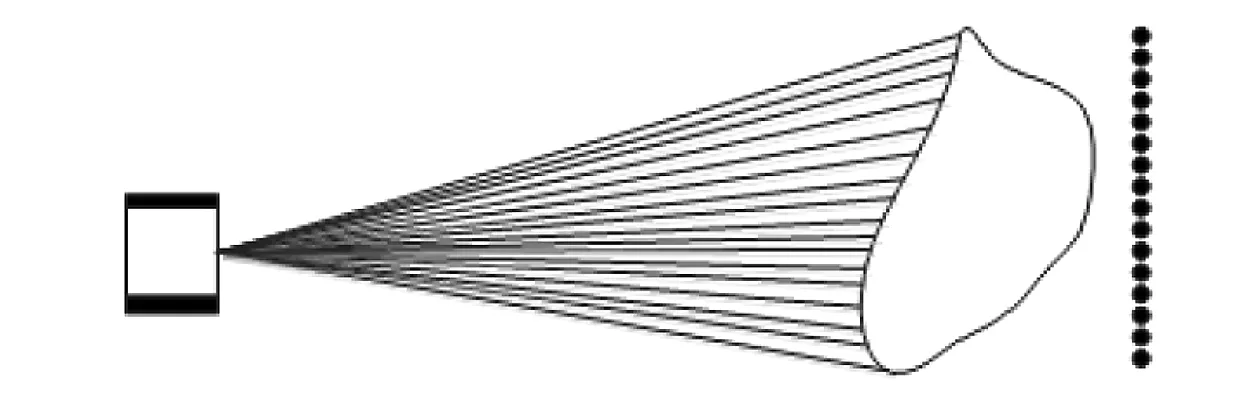
图5 激光雷达扫描示例
对于点目标,激光雷达探测能量包含从目标上被照亮光斑点反射的所有能量,在作用距离方程计算中,需要对目标上整个被照亮区域进行计算。
基于激光雷达的动态障碍物信息提取研究,包括:目标检测、目标识别和动态目标跟踪等3个模块(见图6)。目标检测模块对激光原始点云数据进行聚类和特征提取处理,得到目标的形状、空间位置信息。目标识别模块利用神经网络算法对目标进行识别和分类,输出点云簇的类别信息。USV自身位置和姿态信息通过动态目标跟踪模块融合目标位置信息,利用卡尔曼滤波算法计算USV优化的动态目标运动,并输出其状态信息。
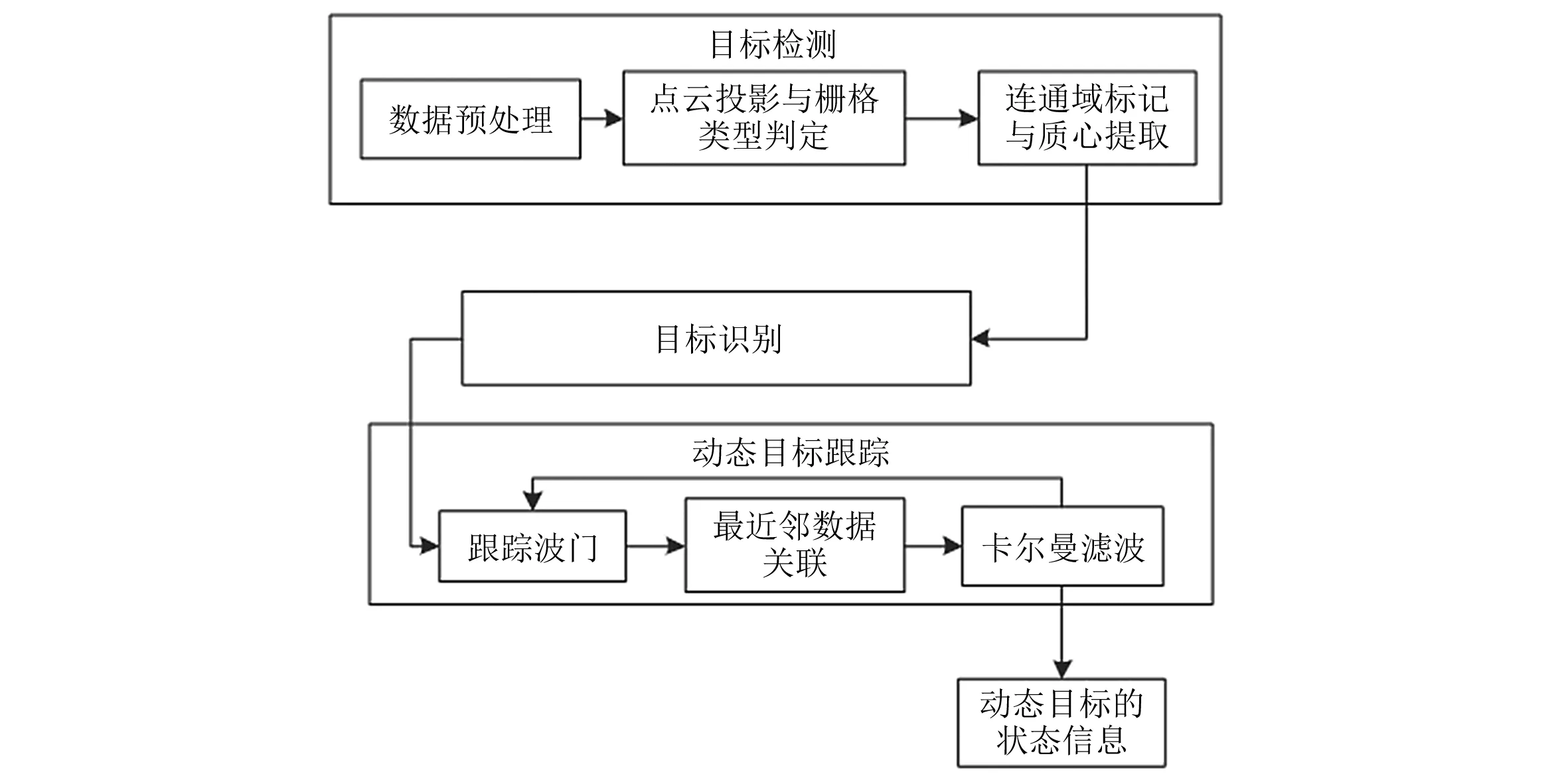
图6 目标检测、目标识别和动态目标跟踪流程
图7为USV避让障碍物场景下的激光雷达检测效果示例。
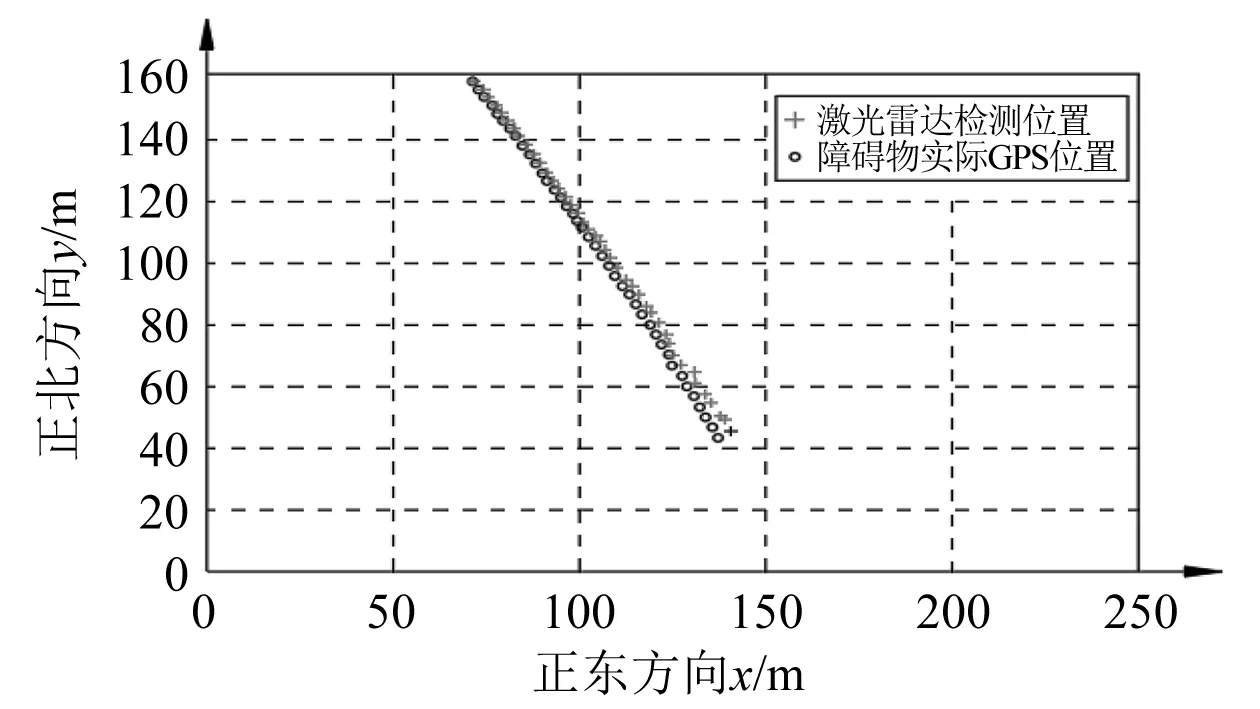
图7 避障过程中的激光雷达检测位置与障碍物实际GPS位置对比
通过一一对应各时刻激光雷达检测位置(x1,y1)与障碍物GPS标记位置(x2,y2),得到两者之间的距离差Δd。图8为避障过程中的距离差随时间变化曲线。

图8 避障过程中的距离差随时间变化曲线
上述所有时刻的距离差平均值计算结果为3.609 9 m。以激光雷达传感器位置检测误差5.0 m为界限进行统计,满足该条件的概率为82.50%。将激光雷达跟踪障碍物得到的障碍物速度信息与障碍物的GPS反馈速度信息进行对比,得到关于速度大小和速度方向的精度统计,如图9和图10所示。
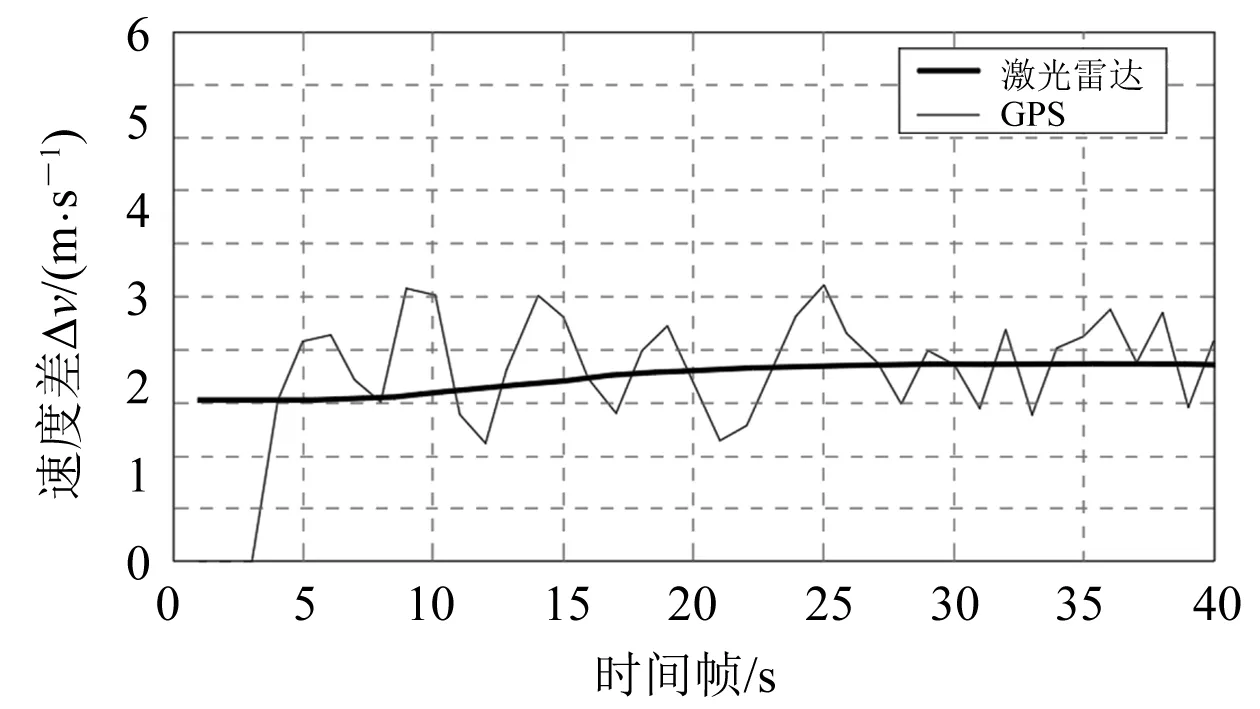
图9 障碍物速度大小统计
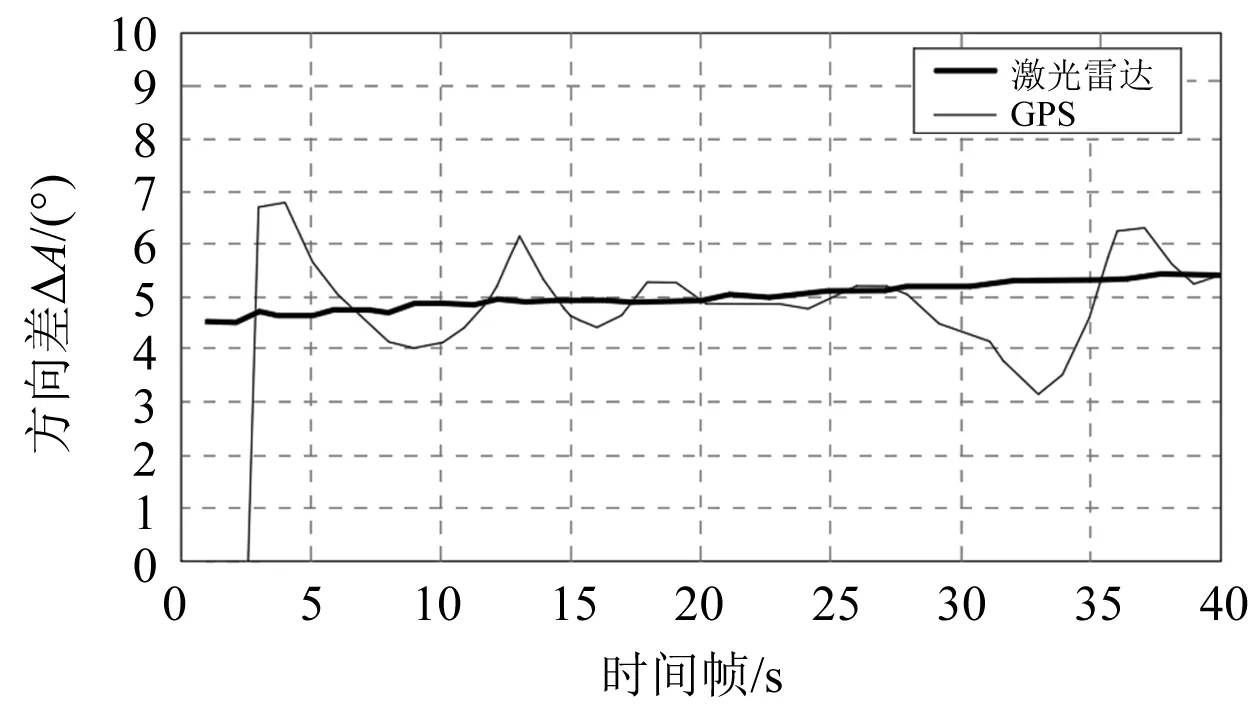
图10 障碍物速度方向统计
速度大小检测的平均误差为0.742 1 m/s,速度方向检测的平均误差为5.908 6°。通过对激光雷达数据的处理对比可知:基于激光雷达检测的障碍物信息较为准确,基本满足USV安全航行对环境信息精度的要求。
1.3 基于单目摄像头的障碍物测距技术
单目测距系统简单、运算量小,需要目标点之间有几何约束关系,应用场景有限制,成本较低。基于单目摄像头的测距方法算法简单、计算量小,成本低廉且实时性佳,近年来国内外对单目测距方法取得了一定的成果,主要分为基于深度学习的测距方法和传统数学模型测距方法。项目采用传统数学模型的逆透视投影变换进行测距。基于逆透视投影变换的单目测距原理如图11所示。
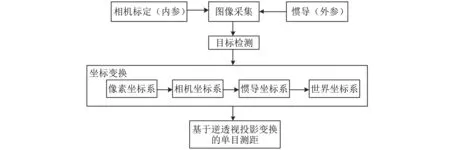
图11 单目测距原理
1.4 基于双目摄像头的障碍物测距技术
双目摄像头无须识别目标的类别信息即可完成所有单目摄像头的功能,且能够获得精度相对较高的深度信息。
基于双目立体视觉的深度相机类似人类的双眼,与基于飞行时间(Time of flight,TOF)技术、结构光原理的深度相机不同,其不对外主动投射光源,完全依靠拍摄的2张图片(RGB色彩模式或灰度图)计算深度,因此也被称为被动双目深度相机。
双目定位流程(见图12)如下:对左、右两个摄像机进行相机标定,得到各自的标定参数;基于标定参数分别对左图和右图进行图像校正,校正后的2张图像位于同一平面且互相平行;对校正后的2张图像进行分割、特征点匹配;基于双目摄像头得到图像空间的深度图[4]。

图12 双目定位流程
2 复杂环境下多传感器感知数据融合流程
在实际场景中,海事雷达和激光雷达是全向目标探距,而单目和双目测距是定向测距。USV主要关注以船首向为参考点-90°~+90°内的扫描区间,单目和双目摄像头以此范围为扫描范围。
在一定范围内,海事雷达能够较好地探测较远距离内的目标方位,而激光雷达则对USV较近范围内的目标灵敏,因此海事雷达和激光雷达能够较好地互补。然而,受风浪、雨雪天气的影响,激光雷达在实际应用中如何抑制杂波影响是个关键问题。在复杂环境感知中,通过单目和双目摄像头对激光雷达进行补偿可以有效地抑制由风浪引起的杂波影响[5]。在实际应用中,海事雷达与激光雷达在距离上互补,单目与双目摄像头在功能上对激光雷达进行补偿。在补偿失败中,通过航行信息对补偿失败的目标进行置信度测试。当置信度在一定周期内大于等于某值时,认为此目标真实存在;当低于某值时,认为此目标不存在[6],应当舍弃。在复杂环境下,多传感器感知数据融合的实际操作流程如图13所示。
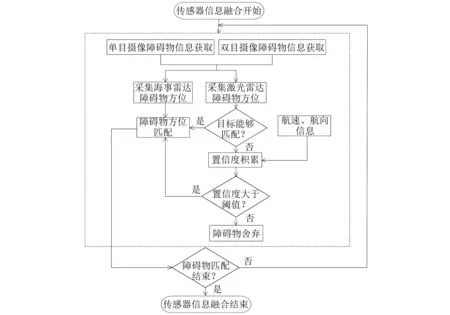
图13 多传感器感知数据融合流程
3 复杂环境下多传感器感知技术实船海上测试
以海上救助USV为载体,试验海域内有海警船、渔船、货船等,海况2级,风力1~3级。USV航速为5 kn,雷达扫描图像生成周期为2.7 s,激光雷达点云数据处理周期为1.5 s,单目和双目摄像头测距周期为1.5 s。表2为测试结果。
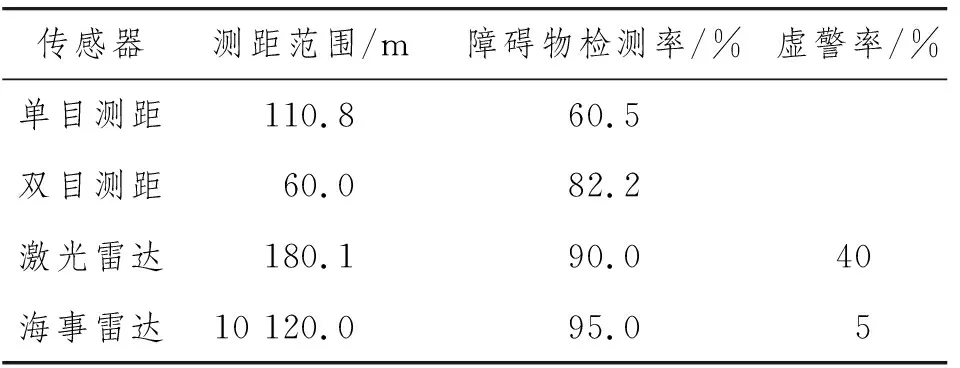
表2 不同传感器性能测试
表3为不同置信度下的多传感器数据融合结果。

表3 不同置信度下的多传感器数据融合结果
根据表3信息可知:置信度越高时,激光雷达、单目摄像头、双目摄像头及海事雷达经数据融合后得到的最优结果目标检测率较好,虚警率会降低。通过对4种传感器检测出的障碍物数据进行融合,能够有效地提高目标检测率、降低目标虚警率。
4 结 语
通过对适用于USV感知传感器采集的数据进行校正、分析和融合,可形成一种稳健的目标识别方法,为USV的自主航行提供稳定、可靠的水上障碍物方位信息。但是USV在海上航行时会受到风向风速、波高流向、浅滩暗礁、各类来往船只等众多随机的可移动和固定障碍物的影响,面对如此复杂、实时多变的环境,目前的海上综合感知技术水平还远远不够。提高识别能力、提高准确性仍然是环境感知技术的重要研究方向。基于某海上救助USV实船数据进行综合感知技术的研究与探讨,对提高USV的技术与安全航行具有一定的参考价值。