改进变指数趋近律直线伺服系统位置滑模控制
2021-10-27白喜强崔皆凡金少山
白喜强,崔皆凡,金少山
(沈阳工业大学 电气工程学院,辽宁 沈阳 110000)
0 引 言
近年来,永磁同步直线电机(PMSLM)得到了快速发展,尤其广泛应用于数控机床、数字化生产线等高精密的工业领域[1-2]。但直线电机直接带动负载运动,电机性能易受负载变化影响,且电机运行时会受参数变化以及一些非线性因素的影响,使得提高电机性能难度大。传统的 PID控制难以满足高性能控制的要求[3]。因此,需要设计一种控制器使系统具有较强的鲁棒性以及较高的响应速度。
滑模控制(SMC)本质上是一类特殊的非线性控制,其非线性表现为控制的不连续[4]。其结构简单,具有很强的鲁棒性,然而,在电机起动过程中SMC需要较长的时间才能使系统达到稳定状态,而且还存在抖振现象[5]。文献[6]采用加权积分增益与指数趋近律结合来减小抖振加快响应速度,但其抑制抖振效果不好。文献[7]设计了新的滑模趋近律,并且与模糊控制结合来减小滑模抖振,但其稳态时速度响应仍存在明显抖振。文献[8]采用线性矩阵不等式(LMI)来设计滑模等效控制律,并用扩张状态观测器(ESO)对各种干扰进行实时估计补偿,来增强系统鲁棒性。文献[9]通过对滑模趋近律进行改进以提高电机参数变化的鲁棒性。文献[10]在传统指数趋近律的基础上引入双曲正切函数、终端吸引子等来削弱抖振水平。
为了改善PMSLM的控制性能,减小滑模变结构控制引起的抖振问题。本文设计了基于ESO的改进变指数趋近律位置SMC。在传统指数趋近律的基础上,引入状态变量变指数积分幂次项、幂次趋近律和饱和函数,有效地减小滑模引起的抖振问题,提高了电机稳定性。引入了ESO,对外界负载扰动进行实时观测,增强系统鲁棒性。
1 PMSLM数学模型
基于d-q坐标系下PMSLM的数学模型:
ud=Rsid+pψd-ωψq
(1)
uq=Rsiq+pψq+ωψd
(2)
ψd=Ldid+ψf
(3)
ψq=Lqiq
(4)
式中:uq、ud为d、q轴电压;iq,id为d、q轴电流;ψq、ψd为d、q轴的励磁磁链;Lq、Ld为d、q轴电感;ω为电角速度;Rs为定子电阻;p为微分算子。
PMSLM电磁推力方程可表示为

(5)
式中:τ为极距;p为极对数。对于表贴式PMSLMLd=Lq。
电磁推力表达式可以表示为

(6)
PMSLM机械运动方程可表示为

(7)
式中:m为动子质量;B为黏滞摩擦因数;Fl为广义负载扰动。
将式(6)代入式(7)可得:

(8)
2 位置SMC设计
2.1 改进变指数趋近律
传统指数趋近律:

(9)
改进的变指数趋近律:

(10)
式中:k、k1、k2均为大于0的常数;0<γ<1;sat(s,δ)为饱和函数。

(11)


该趋近律充分结合幂次项和指数项的特点,在不同趋近阶段具有不同的快速趋近特性,较好地控制收敛速率。
2.2 改进SMC设计
为了实现对系统状态的完全跟踪,定义电机动子位置误差为控制器的状态变量:
x1=pf-p*
(12)


(13)
传统的滑模面函数中包含微分分量,容易引起系统抖振[11],积分滑模面函数具有平滑推力、减小系统稳态误差、削弱抖振、增强控制器稳定性的良好品质,本次控制器设计采用积分滑模面:

(14)
其中,C0、C1>0。
结合式(10)、式(14)设计改进SMC,等效控制律设计为

(15)
切换控制律为

(16)
与式(16)联立的控制律为
u=ueq+uvss=
khs+βhsat(s,δ)]
(17)
根据控制律所设计的SMC如图1所示。

图1 改进变指数趋近律SMC
构造李雅普诺夫函数:

(18)
对式(18)求导得:

(19)
3 基于ESO的新型SMC设计
ESO实际上是通用的扰动观测器[12],不依赖于系统的数学模型[13],可以实时估计控制系统的外界负载扰动,增强系统鲁棒性。
对于非线性系统:
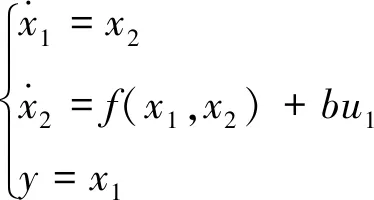
(20)
建立ESO:
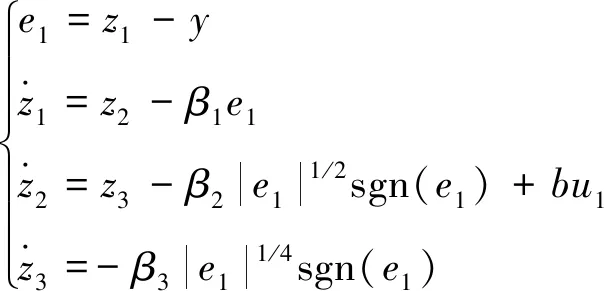
(21)
其中选择合适的β1、β2、β3的值,就可以很好地估计出x1、x2、x3[14]。即:
z1→x1、z2→x2、z3→x3
针对PMLSM的ESO:x1=pf、x2=v、u1=iq、z3为扰动观测值。
4 仿真分析
为了验证改进变指数趋近律积分SMC以及与ESO结合的控制效果,进行了仿真验证。所采用的电机参数如表1所示。
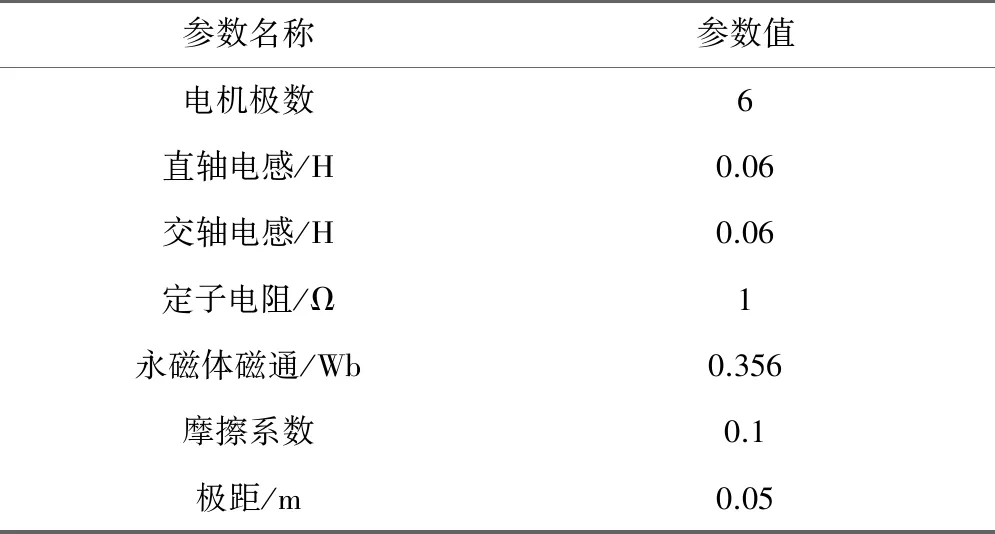
表1 PMLSM参数
针对上述电机,设计基于ESO的改进变指数趋近律SMC如图2所示。
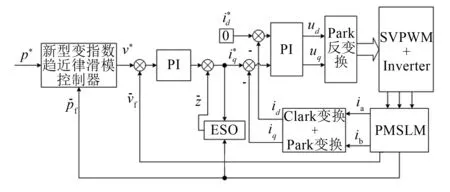
图2 PMSLM控制系统模型
仿真分别对电机进行了空载和突加负载仿真试验,电机线速度为1 m/s,仿真时间为0.5 s。改进SMC参数如表2所示。
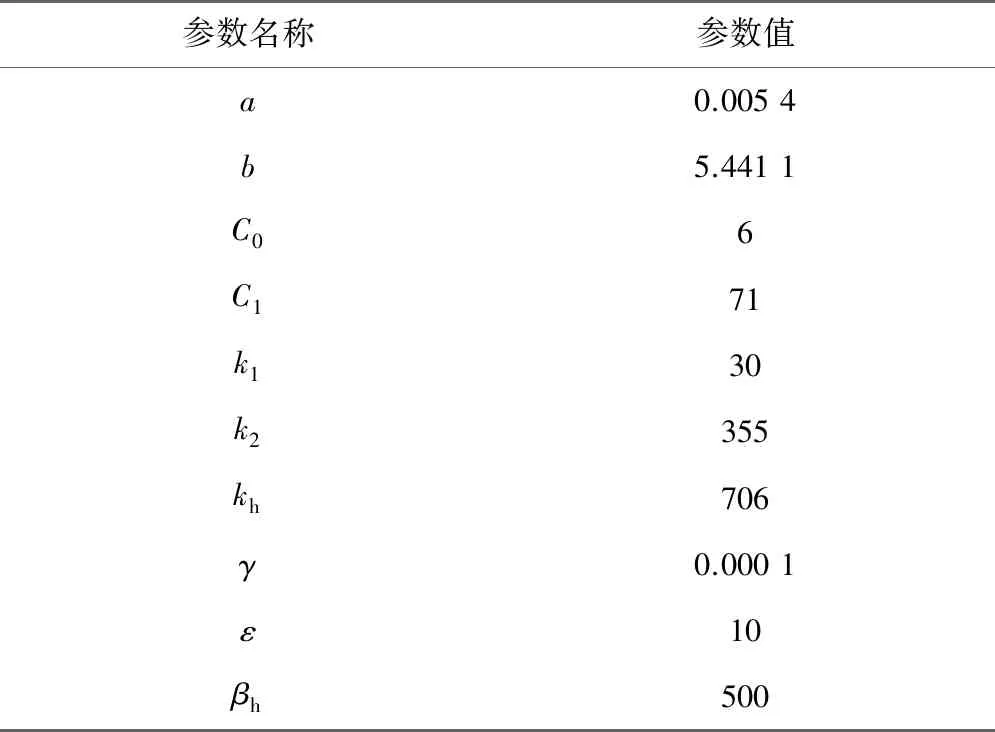
表2 改进SMC参数
根据图3所示的电机位置误差波形来看,改进变指数趋近律的SMC响应时间较短,减小了0.15 s。在系统达到稳态时,改进SMC抖振明显减小,且控制精度也有所提高,稳态时误差达到0.5 μm,而传统指数趋近律平均稳态误差在2 μm。
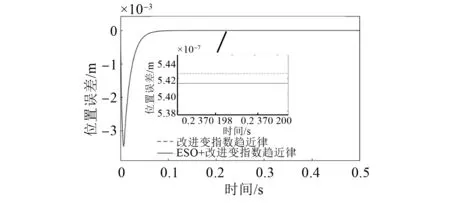
图3 位置误差波形
图4、图5分别为传统指数趋近律和改进变指数趋近律SMC的电机速度波形。从图5可以看出,改进后的SMC速度超调略大,但抖振现象明显减小。
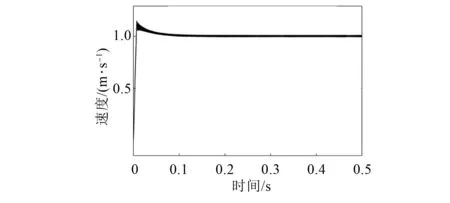
图4 传统指数趋近律SMC速度波形

图5 改进变指数趋近律SMC速度波形
图6、图7分别为2种控制方法空载时的q轴电流波形,从波形可以看出,0.08 s后,改进后的SMC的电机电流波动明显减小。
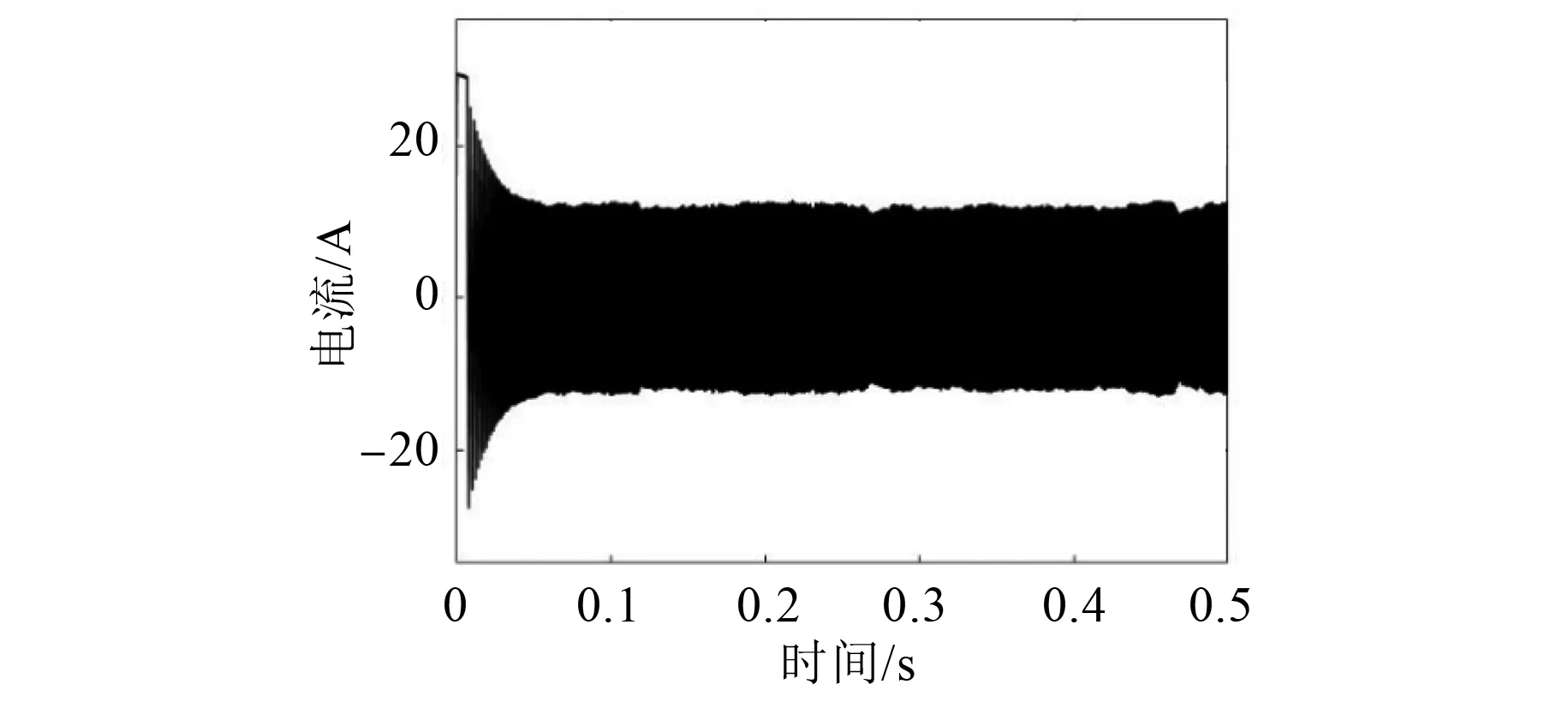
图6 传统指数趋近律SMC iq波形
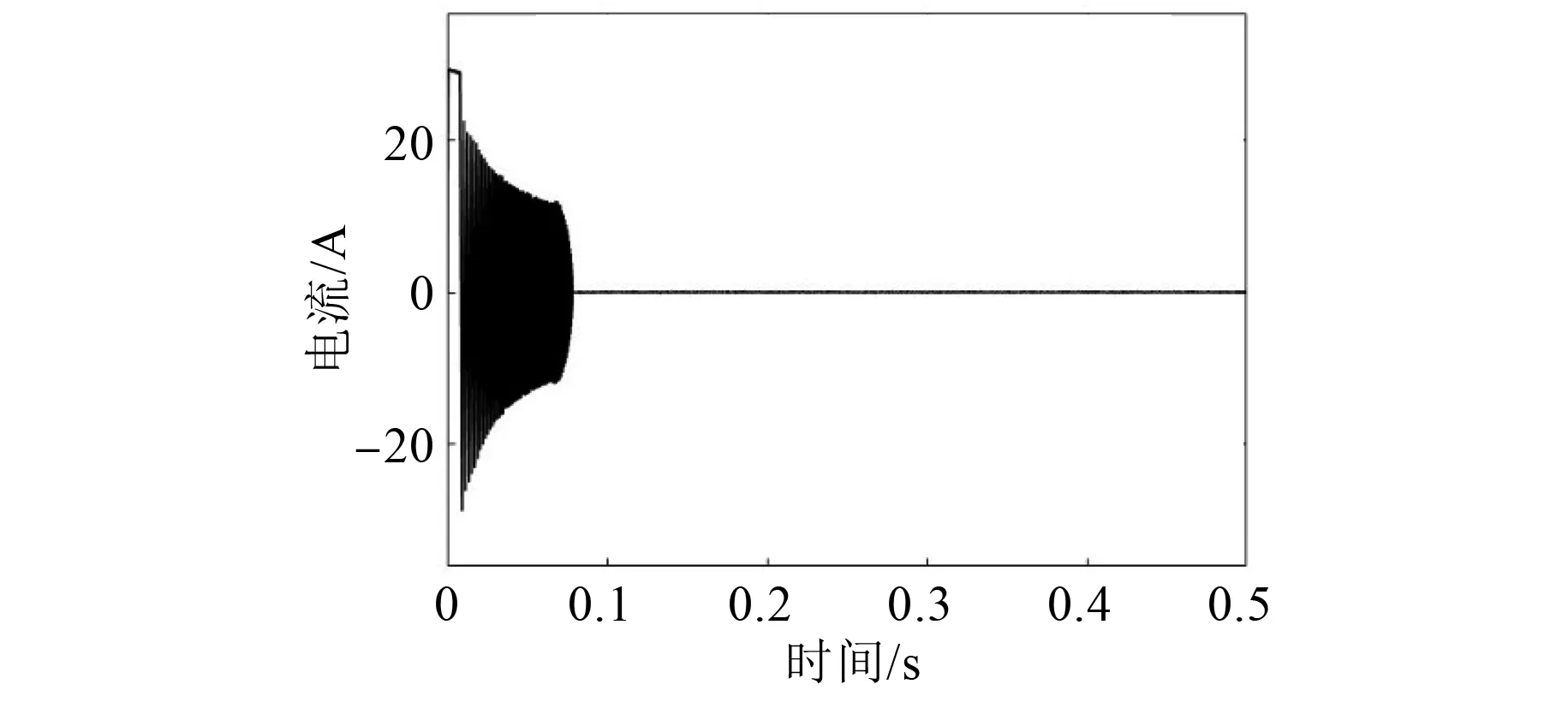
图7 改进变指数趋近律SMC iq波形
图8为控制系统有无ESO的电机位置误差波形对比图。加入ESO的控制系统稳态误差比未加入ESO的SMC系统减小了0.001 μm,可以看出ESO的观测误差对系统的跟踪误差几乎没有影响。在0.3 s突加100 N负载后,如图9所示,ESO可以使电机在突加负载后可以很快地回到突加负载前的状态,提高了电机系统的鲁棒性。
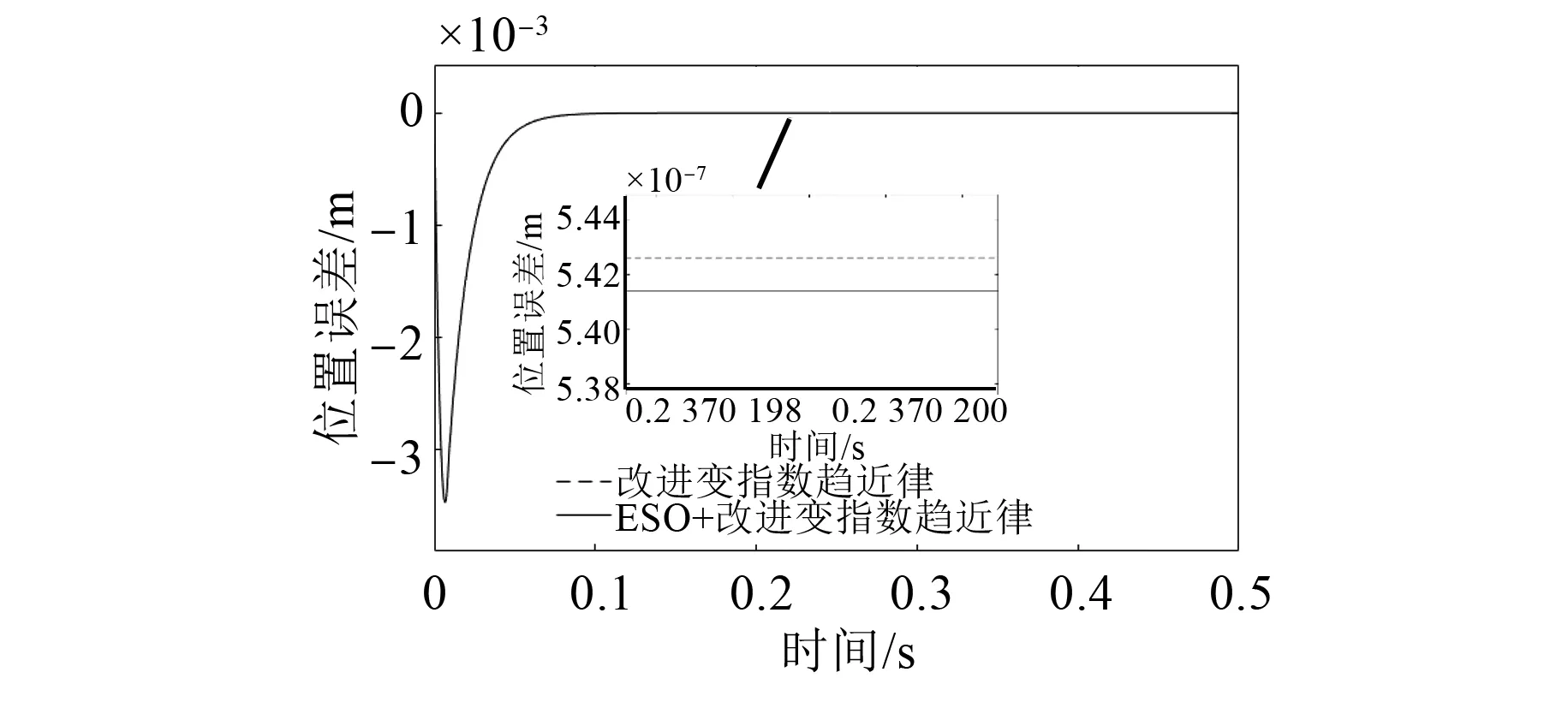
图8 位置误差波形
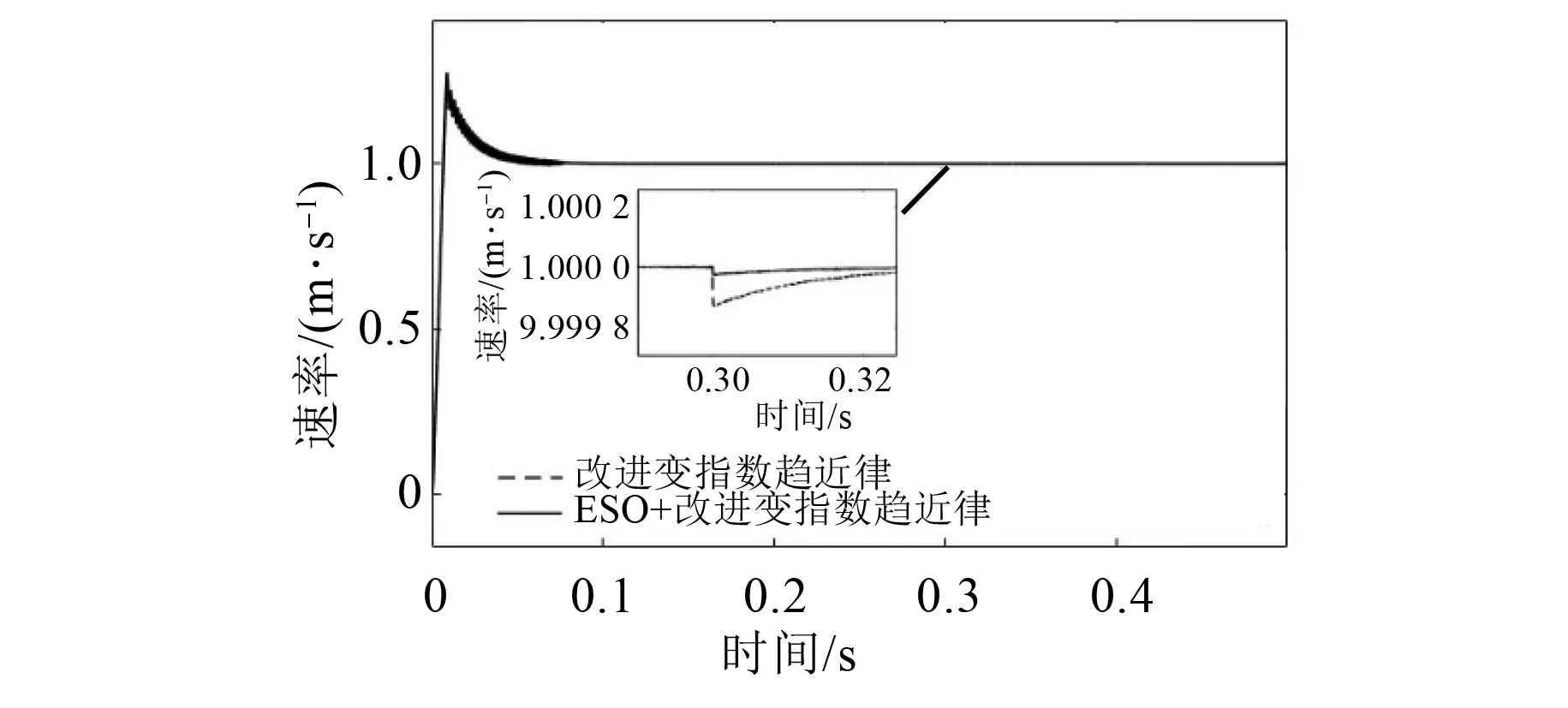
图9 电机速度波形
图10为改进后的SMC电机动子实际位置与给定位置的波形。可以看出,改进后的控制器可以使动子很好地跟随给定位置,电机的稳态误差从2 μm减小到0.5 μm。
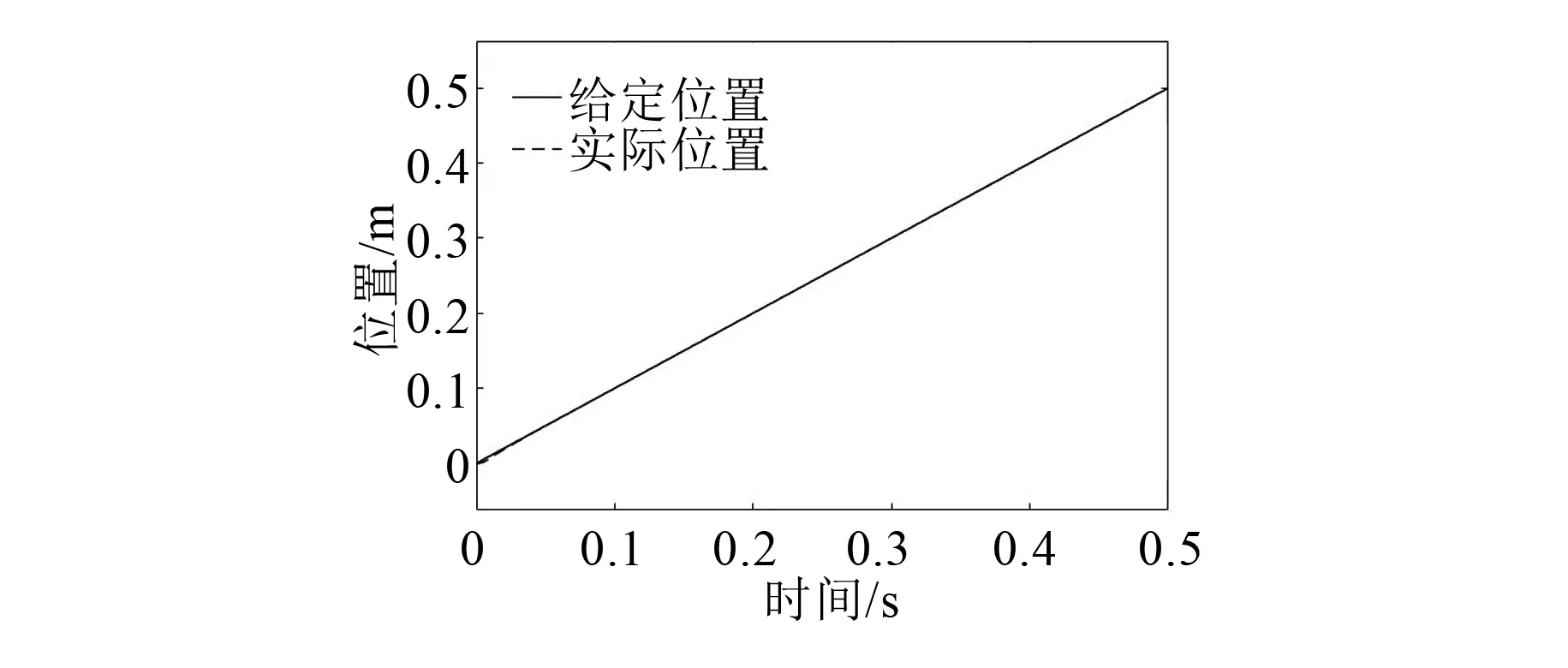
图10 动子实际位置和给定位置波形
5 试验研究
为了验证基于ESO改进SMC的可行性,搭建了电机试验平台,如图11所示。试验平台控制对象是圆筒型PMSLM,主控芯片是DSPTMS320F28335。试验平台以DSP28335为核心控制单元,系统主要硬件包括电源电路、控制电路、功率驱动电路、故障检测、信号检测电路和保护电路以及通信电路。

图11 PMLSM控制系统试验装置
电机设定速度为1 m/s,运动行程为0.3 m。图12、图13分别为改进前后电机的位置误差波形。可知,改进后的SMC响应时间更短,约为0.08 s,且跟踪误差也较小。
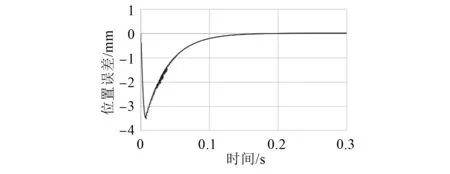
图12 传统指数趋近律SMC位置误差波形

图13 改进SMC位置误差波形
图14、图15分别为改进前后电机的速度波形。可知,改进后的滑模抖振明显减小。图16为基于ESO改进SMC电机动子的实际位置波形,试验结果符合仿真分析结果。

图14 传统指数趋近律SMC速度波形

图15 改进SMC速度波形

图16 动子实际位置波形
6 结 语
为了提升PMLSM控制性能,本文提出了基于ESO改进的变指数趋近律SMC。在指数趋近律的基础上引入状态变量的变指数积分幂次项、幂次趋近律和饱和函数,同时引入ESO来增强系统鲁棒性。通过与传统的指数趋近律SMC进行对比,改进后的SMC可以明显地抑制滑模本身存在的抖振问题,控制精度也明显提高,系统鲁棒性也明显增强,并通过仿真与试验进行了验证。
