露天矿山自动驾驶技术研究
2021-10-27高利敏曹燕朝梁思远
高利敏 曹燕朝 周 杨 梁思远
(山西维度空间信息科技有限公司,山西 太原 030000)
0 引言
在国家工业4.0和中国制造2025战略的指引下,传统露天矿山以创新驱动发展为主题,深入推进“两化”的高层次深度融合[1],由传统型、经验型向自动化、系统化、多元化以及智慧化方向发展,应用先进的高新技术将矿山现有的设计、生产、经营和管理等各系统整合统一,实现整个矿山系统的信息集成与共享,各部门协同作业,逐步走向智能化、智慧化矿山。不仅能避免和减少对驾驶人员安全、健康的危害或威胁,而且能大幅提升经济效率、降低运输成本,确保矿山的安全生产[2]。
1 露天矿山自动驾驶作业场景
露天矿山开采作业工序遵循“穿孔-爆破-采装-运输-排卸”的基本流程,自动驾驶矿卡运输作业主要的环节为开采区域(精准停靠和自动驶离)、运输道路(循迹行驶、自主避障和上/下坡)、排卸区域(精准停靠、自主避障和自动倾倒)和定点后勤保障区域(维修保养、加油补水)等4个作业场景。
2 露天矿山自动驾驶关键技术
自动驾驶系统将探测、识别、判别、决策、优化、执行、反馈以及纠控功能融为一体,集多种顶尖科技成果于一身,是可以自主分析、自我学习以及自动进行成果总结的多学科交叉融合的技术系统。该系统涉及的关键技术包括环境感知技术、定位技术、安全通信技术、分析决策技术、智能调度技术和控制执行技术等[3-4],自动驾驶总体方案如图1所示。

图1 自动驾驶总体方案
2.1 环境感知技术
环境感知技术在自动驾驶系统中负责收集矿卡自动驾驶功能所需要的信息,露天矿山作业区的主要障碍物包括静态障碍物和动态障碍物,其中动态障碍物主要包括其他矿卡、装载设备、辅助设备以及工作人员等,静态障碍物主要包括安全车挡、破碎站和路面乱石等。考虑到以上障碍物的特点,采用视觉、毫米波雷达和超声波雷达相结合的组合感知系统,实现对动静态障碍物的高精度多模态感知识别分类,通过多源传感器信息融合、多目标跟踪等技术实时收集周围的环境信息,以提高对环境感知的准确性,为自动驾驶决策提供及时、准确且可靠的决策依据。
双目视觉相机是利用仿生原理,包括镜头、摄像系统和图像处理系统,通过标定后的2个摄像头得到同一个物体的同步曝光图像视差和深度,将像素分辨率、亮度、色彩和色调等信息转变成数字化信息,经过计算机视觉的自适应识别算法对周围环境进行匹配和标定。由于环境特殊,受光线、风力和矿卡的不规则震动等原因会导致拍摄的视频出现不规则运动,采用空域滤波来减少图像生成、传输或者因外部环境而产生的噪声,并优化失真现象,提高图像的信噪比,对视频中图像帧间进行运动矢量估计,分离运动估计获取的运动矢量中摄像机的上下震动和随机摆动,并对其进行补偿,从而获得稳定流畅的视频。
毫米波雷达是通过发送和接收电磁波的参数来计算目标的各个参数,包括距离、角度、相对速度和方位信息等。在露天矿山这种复杂的行车环境中,毫米波雷达的测量值可能来自目标车辆等动静态障碍物,也可能来自于其他干扰物,还可能出现虚假目标。同时,由于矿卡自身的颠簸,会引起探测目标信息出现不同程度的波动,首先通过设定横向距离区分阈值对目标障碍物与该车运动方向进行判断,并运用运动方向最近距离的原则来对有效目标进行初选;其次,运用Kalman滤波方法预测目标信息,并设定最大容许误差,对初选目标信息和目标信息预测值进行一致性检验,采用有效目标生命周期法,通过主要参数的变化规律和目前状态来对生命周期的每个阶段进行设置,并更新相应的目标信息、目标预测跟踪以及目标更换决策,从而实现对有效目标物的准确选取。有效避免虚假目标、干扰目标及矿卡摆动和颠簸造成的影响。
超声波雷达是通过超声波发射装置向外发出超声波,并通过接收器收到超声波时的时间差来测算距离。超声波测距常用的方法是采用往返时间检测法,超声波在空气中的传播速度为v,根据计时器记录的时间t就可以计算出发射点到障碍物的距离s=vt/2。需要考虑温度(T)对超声波在空气中传播速度的影响,通过超声波在介质中的传播速度加以修正,以减少误差(v=331.4+0.607T)。可以通过扫描良好地对近距离内其他传感器的盲区进行弥补。
2.2 定位技术
对自动驾驶系统来说,使用高精度地图进行定位是必不可少的,通过车载GPS、INS、LiDAR或摄像头等多种传感器来采集道路的各类信息,不仅提供了精准的定位、辅助环境感知,而且还拥有更加丰富的道路路况信息,让自动驾驶矿卡获得自身确切的位置。在自动驾驶系统中定位技术是采用GPS与INS组合导航技术,系统组合原理如图2所示,根据加速度计与陀螺仪的输出对惯导的累计误差进行补偿修正,通过四元数法解算出IMU的姿态,再根据IMU与矿卡间的相对角度就可以解算出矿卡的姿态角。融合惯导解算得到的定位信息与GPS的定位信息,通过卡尔曼滤波算法计算得到的差值的误差,从而对组合导航系统进行反馈修正,有助于提高定位精度,增强定位系统的鲁棒性。可以不依赖于任何外部信息,全天侯、实时输出矿卡的各种导航参数,包括位置、速度、姿态、加速度以及角速度等,具有数据更新率高、短期精度和稳定性好等特点,以便于自动驾驶矿卡能够根据相关信息精确地输出分析决策。
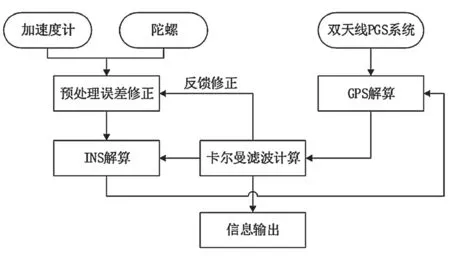
图2 系统组合原理图
2.3 安全通信技术
在自动驾驶矿卡作业的过程中,矿车与周边环境之间存在大量文字、语音、数据以及图像等信息的实时交换,通信系统是自动驾驶系统获取和传递信息的神经中枢,借助5G高速率、低延迟和广连接等特点为智慧矿山搭建一个高安全性、高可靠性、低延迟且可以实时传输的网络平台,实现对当前自动驾驶技术通信系统的优化,提升数据传输速率、传输时延,实现了终端融合、技术融合、网络融合和业务融合。
2.4 分析决策技术
对智能分析决策技术来说,人工智能和大数据分析起关键作用,其核心思想就是“模仿人的思维”进行判断。根据矿卡所安装的传感器对作业场景中多类型动、静态障碍目标的感知反馈信息,结合自动驾驶矿卡集群调度系统指令,提出多目标分类避障规划。重新对智能感知所得到的各类动静态障碍物进行类别划分,对各类传感器所采集的信息进行融合分析,综合考虑矿卡在运输过程中的各项成本,通过蚁群算法和遗传算法混合算法(如图3所示)学习外界场景信息,再由策略库进行动作部署,结合矿卡车辆动力学,规划出局部空间和时间内矿卡的最优运动轨迹。

图3 混合算法流程图
2.5 智能调度技术
露天矿山智能调度以高精度定位、实时称重和大数据分析为主要手段,通过采集生产设备的动态信息,实时监控和优化调度矿卡、电铲等设备的运行,结合露天矿山实际场景及施工成本,不同的动、静态障碍物应通过相应的避障算法采取不同的避障行为。同时对部分动态障碍物(例如施工区域内同时工作的其他矿卡)需要结合自动驾驶矿卡集群调度系统指令,根据“工作优先级”的避障方法,对特殊的静态障碍物(矿卡无法直接通过),需要发送绕行指令,并由矿卡路径规划算法规划新路径,完成避障操作。在与矿卡运输相关联的多信息系统数据充分融合的基础上,通过技术融合和流程信息化再造实现矿卡运行的无人化调配、矿卡数据的统计分析以及智能化管控,进而优化生产,提高资源利用率。当矿卡出现装载点停车偏差、系统故障等异常情况时,调度员可以通过远程操纵进行处理,及时应对生产中出现的紧急情况或突发事件,以实现及时响应生产、及时调整生产和安全生产的目标。
2.6 控制执行技术
自动驾驶控制技术的核心工作是将系统稳定在最佳设定值,控制机构如图4所示,将驾驶员操纵的转向、油门、转速、制动以及箱体举升等动作经过传感器转换为电信号,通过电控动力驱动直接控制执行,分为纵向控制和横向控制,纵向控制是对行驶速度的控制以及对矿卡自身速度、与前后车或障碍物距离的自动控制,包括加速控制单元和减速控制单元。横向控制是垂直于行驶方向的控制,即转向控制单元和控制车轮转向角。在不同的车速、载重以及路况下,保证车辆的稳定性,通过线控改造矿卡的执行器,结合决策规划信息直接通过底层执行器控制算法对电机驱动、发动机和制动系统发送控制指令,分层、分级和分区的多套控制,调节车辆行驶速度、位置和方向状态,保证自动驾驶矿卡的安全性、操纵性和稳定性。
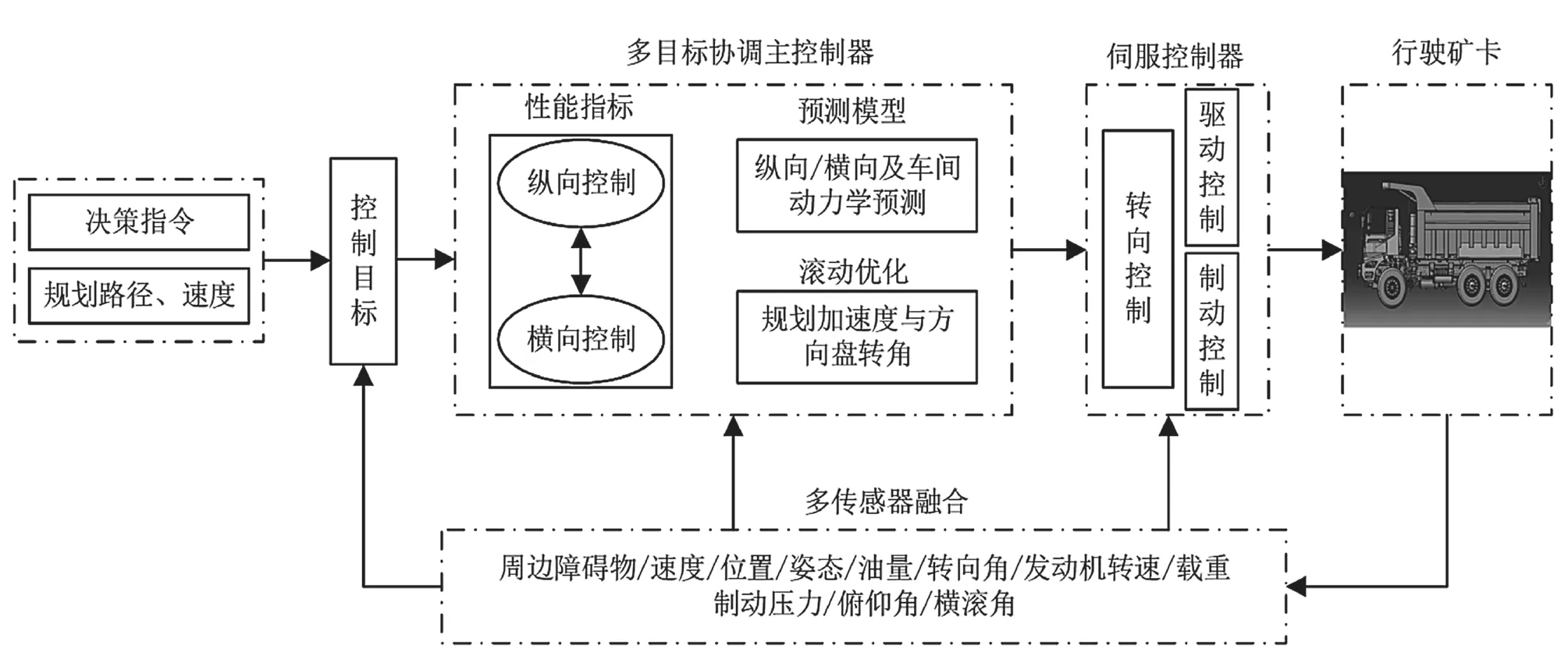
图4 自动驾驶智能控制机构图
3 结语
随着人工智能、5G通信技术、计算机视觉技术以及多传感器融合技术等学科的快速发展,国家宏观政策特别关注矿山无人化的建设,我国很多矿山企业与高科技公司、设备厂家以及通信公司一起进行深度合作,共同研发更适合露天矿山的自动驾驶技术系统,真正实现机械化换人、信息化减人以及智慧化无人的目标。相信在不久的将来,露天矿山的自动驾驶技术会得到更好的发展与推广。
