基于激光测距及ROS 系统的无人机导线跟随方法研究*
2021-10-26廖如超廖建东李国强袁新星康泰钟
张 英,廖如超,廖建东,李国强,袁新星,康泰钟
(1.广东电网有限责任公司机巡作业中心,广东 广州 510145;2.北京数字绿土科技有限公司,北京 海淀区 100089)
为了保证输电线路的正常运行,及时发现输电线路故障,记录故障位置和原因,及时制定预防和解决方案对于电力巡检是十分重要的[1]。目前,直升机检测、机器人检测和无人机检测在架空输电线路检测中得到了广泛应用。直升机巡逻主要由直升机沿架空输电线方向飞行,巡检人员在直升飞机中利用高清摄像头观察并记录设备故障情况。直升飞机巡检能够提高检测精度和检测效率,但其有飞行管控、气候变化等因素的限制,并且它的成本也偏高,导致该巡检方式不能适用范围广泛的推广[2-3]。巡检机器人主要是挂在架空输电线路沿线爬行,利用挂载的传感器对安装在塔的导线、绝缘子、线硬件、通道电路进行检查。由于巡检机器人必须提前安装在塔上,安装和卸载导致检验的低效率[4-5]。而无人机的检查主要由巡检人员操控无人机飞到架空传输线通道,对通道进行视频拍照、留档查看、检查并分析[6-7]。在人工操控无人机巡检过程中,无人机需要在有限的视野中飞行,容易发生意外事故并影响电网安全,这就要求作业人员对无人机操作及电网运行环境有足够的了解和熟悉。因此,降低无人机在电力巡检过程中的操作门槛,是提高输电线路运维效率、降低运维成本、提高电力企业经济效益的关键问题。
在无人机导线跟随飞行的研究中,有通过视觉测量来实现,例如王亚先[8]提出单目视觉测量无人机距离输电导线的水平距离和垂直距离来实现无人机在一定规则下的自动飞行和相机追踪导线。Valipour等[9]提出一种基于高斯可控滤波器与概率霍夫线变换结合的导线检测方法,并使用无迹卡尔曼滤波进行导线跟踪。Nasseri 等[10]提出一种基于粒子滤波的无人机航拍电力线检测和跟踪方法,但基于视觉的测距方案在巡检场景对光线要求严格,在实际场景中环境复杂多变,难以在实际场景使用。研究表明,采用激光雷达测距对无人机进行实时控制有更强的鲁棒性[11-12]。
提出无人机挂载三维激光雷达进行测距,建立无人机搭载三维激光的巡检飞行模型,在这个基础利用PID 控制算法实现导线跟随飞行姿态控制,利用实时运动定位(real-time kinematic positioning,RTK)计算多塔之间在地理坐标上的几何关系,在该几何关系上设计过塔飞行控制算法,实现多塔之间的过塔飞行。该系统利用板载计算机在机器人操作系统(robot operating system,ROS)的架构下作为控制单元,实现脱离遥控器控制的无人机电力自动巡检系统。
1 无人机导线跟随飞行算法
利用三维激光雷达作为无人机感知周围环境的传感器,它相对于视觉更具鲁棒性,而且对于本文Velodyne 16 线三维激光雷达来说,它的水平分辨率为0.4°,在距离导线安全距离为5 m 的情况下,能保证扫描到架空输电线路半径为3.4 cm 以上的导线点云信息,对于扫描到的导线点云信息需要在坐标系上表达才能反映无人机周围环境。
1.1 建立三维激光雷达坐标系
三维激光雷达的扫描方式侧视图和俯视图如图1 所示。其中α、ω为激光束扫描到的点云水平角度和垂直角度,D(α,ω)为该点云距三维激光雷达的距离。
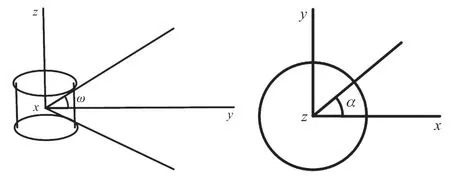
图1 三维激光雷达侧视图和俯视图
在这基础上建立三维激光雷达xyz坐标系如图2 所示,另外为了更方便扫描到导线点云信息和扩展后续巡检任务场景如导线下方树障信息等,采用三维激光雷达挂载方式如图3 所示。其挂载在架空输电线路的扫描范围如图4 所示。

图2 三维激光雷达坐标系
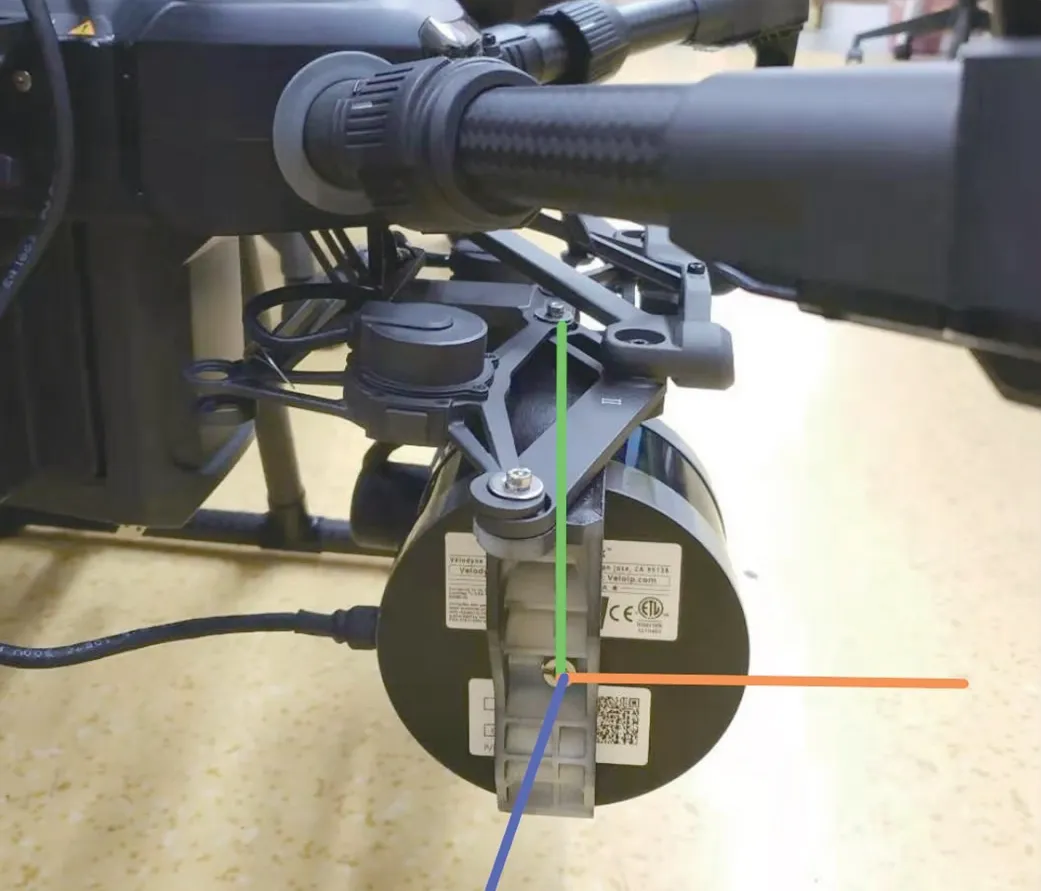
图3 三维激光雷达挂载方式
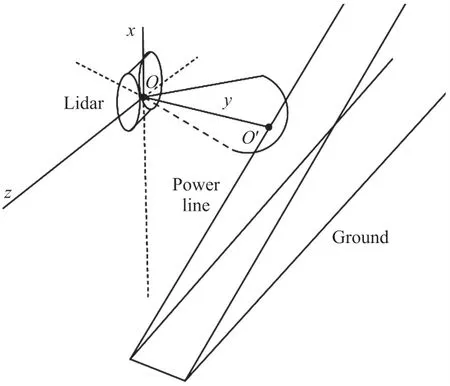
图4 架空输电线路的扫描范围示意图
1.2 塔间导线跟随飞行模型
为了实现无人机塔间飞行跟随,需要感知无人机周围环境并且对其跟随姿态进行数学建模定义,为后续的控制提供计算基础。三维激光雷达在该挂载状态下,对无人机塔间跟随飞行过程进行几何关系建模,无人机在三维激光雷达多线感知下捕捉导线与无人机位置之间的三维几何关系,如图5 所示。
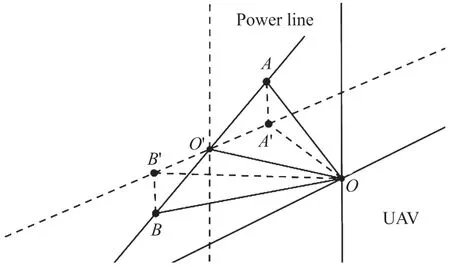
图5 无人机跟随飞行几何关系模型
根据该几何关系定义无人机跟随飞行的飞行姿态模型。首先定义三维激光雷达扫描一圈的时间为一个扫描周期T,在这个周期T中,定义雷达测量导线与雷达之间的距离D,其中D为

式中:C、Q为导线扫描水平和垂直角度范围。
接下来对跟随飞行姿态进行定义,如式(2)、式(3)所示,EOA-OB和EAA′-BB′分别为测量模型中OA与OB的差值和AA′与BB′的差值。当EOA-OB<ε,即测量模型中的OA长度和OB长度的差值小于某个阈值ε时,认为无人机飞行姿态与导线平行。当EAA′-BB′<δ,即测量模型中的AA′长度和BB′长度的差值小于某个阈值δ时,认为无人机当前周期的状态处于导线中心飞行姿态。满足上述两个条件后,即可认为无人机处于前方导线段的中心位置。其中
当无人机同时满足两个姿态时,可以认为无人机处于导线跟随飞行姿态。跟随飞行轨迹在导线侧视图呈现为导线弧垂走势。
另外利用当前无人机RTK 位置信息与杆塔GPS 位置信息计算距离Dd-t,设定阈值λ和无人机距离杆塔的安全距离为Ds,当|Dd-t-Ds|<λ时认为跟随飞行结束,控制无人机悬停接下完成过塔飞行。
1.3 跟随飞行控制算法
对跟随飞行模型定义出飞行姿态后,为了使得无人机在飞行过程中保持上述飞行姿态,从而实现导线跟随飞行,需要对三维雷达感知的距离信息对飞行姿态进行控制,跟随飞行控制需要对控制量进行反馈调节。采用的PID 控制算法实现该飞行控制。PID 控制原理为:

式中:u(t)是被控制量,e(t)是实际输出值和期望输出值之间误差,Kp是比例系数,KI是积分系数,KD是微分系数。PID 控制原理是基于系统输出值的反馈控制的,关键是把系统的输出值和期望值的误差作为控制量。其中Kp是直接影响到实际控制效果的,在合理的数值范围内Kp越大,控制效果越好,越短时间回到期望值,但也容易导致抖动,无法稳定于期望值;KD影响的是控制量向期望值靠近时的加速度,即使得靠近期望值的过程相对平滑;而只有KD控制会导致控制量一直与期望保持一个恒量差值,再者KI是来抵消这个恒量的。将上述的EOA-0B、EAA′-BB′作为PID 控制算法的控制量。
2 无人机过塔飞行算法
无人机导线跟随飞行不仅仅包括塔间导线跟随飞行,还需要实现无人机在塔与塔之间通过三维激光雷达感知下的自动跨越飞行,从而实现无人机全自动巡检,其过程即无人机完成塔间导线跟随飞行后在该导线绝缘处悬停飞行后,完成跨越杆塔的飞行任务,主要利用RTK 地理坐标信息建立多塔间的几何关系实现。
2.1 建立多塔之间的几何关系
由于电力杆塔的GPS 位置都是先验的,可获知的,所以可根据该GPS 位置可以建立多塔之间的几何关系,为了建立连续三塔之间的简化几何关系模型,将无人机始飞塔、待跨越的塔及下一个待跨越的塔,分别表示为1 号塔、2 号塔、3 号塔,其几何关系如图6 所示。
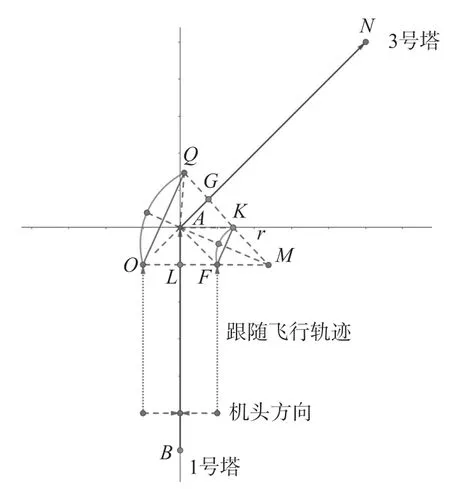
图6 过塔飞行几何模型
在该坐标系中需要的跨越塔位置A点为中心,始飞塔与跨越塔连线为坐标系的x负半轴。
2.2 过塔飞行模型
在上述过塔飞行几何模型下,对其过塔飞行过程进行分析,要实现过塔飞行主要需要计算无人机跨越飞行路程,为了完成过塔后无人机尽量减少跟随姿态的调节控制时间,采取圆弧式跨越,即需要计算该圆弧的长度,如。而且过塔飞行会因为无人机飞行在杆塔左右位置导致飞行路程的不同。定义∠BAN小于180°为内角跨越角度β,其另一侧为外交跨越角度δ。
所以进一步需要判断当前跨越塔飞行类型,即需要考虑当前过塔飞行跨越的是外角过塔飞行还是内角过塔飞行,若为则外角过塔飞行,则为内角过塔飞行。
判断条件为当机头方向与2 号塔向3 号塔方向的夹角θ为钝角时,为外角过塔飞行。当θ为锐角时,为内角过塔飞行。根据外内角过塔的不同,飞行路程也不同。在内角过塔飞行中根据几何关系可以知道飞行路程LFK的计算过程为

式中:γ代表无人机绕圆周飞行的弧长在整个圆周长中的占比。
d=LAF为通过无人机GPS 位置信息和杆塔GPS位置信息计算的无人机与杆塔的距离。
s=LLF为无人机与导线保持的安全距离。
同理,在内角过塔飞行的飞行路程的计算过程为

2.3 过塔飞行控制算法
根据定义的过塔飞行模型,系统可在2 个速度方向对飞机进行控制,从而实现过塔飞行,即无人机的航向偏转角速度νa、无人机侧飞速度νs。由过塔飞行的路程L,控制无人机在设定的过塔航向偏转角速度νa,可计算过塔时间t,在该过塔时间t和过塔飞行路程L上计算得出侧飞速度。当该设定的过塔航向偏转角速度νa和计算得出的侧飞速度νs在时间上积分,得到的结果分别为β和L时,认为过塔飞行任务完成,接下来可以根据任务来继续塔间导线跟随飞行。
3 系统架构
3.1 ROS 架构
为了实现三维激光雷达、无人机、RTK 多设备之间可靠通信,系统架构采用ROS 架构,ROS 是用于编写机器人软件程序的一种具有高度灵活性的软件架构,非常适合本文中多传感器之间通信的特点。系统采用大疆M210 作为测试无人机,Velodyne 16线的三维激光雷达,板载计算机采用大疆的妙算2,在大疆提供的板载软件开发包(Onboard Software Development Kit,OSDK)的基础上对大疆无人机进行控制,在ROS 架构上节点话题发布和订阅如图7所示。
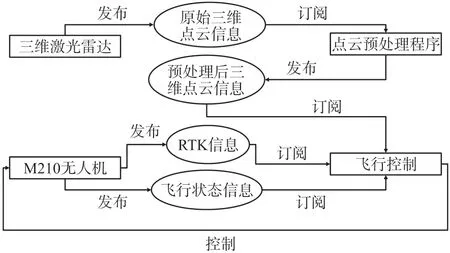
图7 系统中ROS 架构
3.2 巡检流程
在该系统架构下实现无人机电力自动巡检系统,只需再搭载高清摄像头或者其他检测装置,在自动飞行过程中对导线进行检测任务即可。其具体流程为:首先巡检人员只需将无人机操控到在始飞塔,捕抓导线成功后,设定安全悬停距离Ds、巡检速度ν、导入巡检塔的GPS 位置后,利用遥控器向飞机发送开始巡检任务,板载计算机获取飞机控制权,完成接下来的巡检任务,其具体流程如图8 所示。
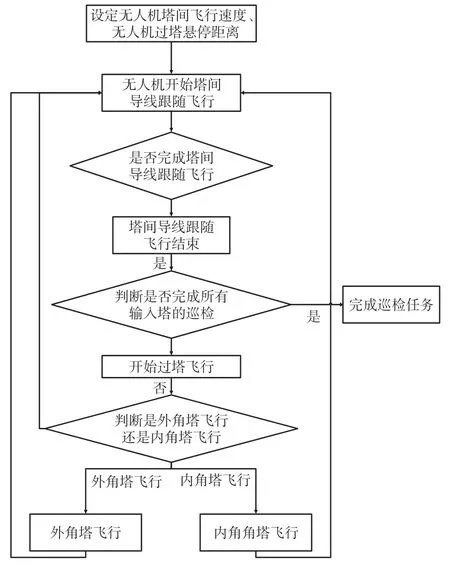
图8 自动巡检流程图
4 实验分析与结果
4.1 实验设计和条件
实验主要包括3 个部分:第1 个是验证跟随飞行姿态中的导线平行飞行姿态控制的可行性。第2个是验证跟随飞行姿态中的导线中心飞行姿态控制的可行性。第3 个是验证过塔飞行控制的可行性。
首先,对于验证导线平行飞行姿态控制和导线中心飞行姿态控制的可行性,我们在实地场景测试,无人机对线后,开始自主巡检,主要是观察无人机在开始被控制后RTK 信息中的航向角是否能够与导线走势角度一致,并且一段时间能够收敛稳定于该值。然后,主要是观察无人机在开始被控制后,对于参数采用δ=0.05 m,ε=0.05 m,λ=0.1 m,Ds=7 m,ν=5 m/s 的情况下,是否能够收敛于可接受区间。
最后验证过塔飞行的可行性。我们采用仿真实验对其过程进行验证,参数νa=1 °/s,观察其飞行轨迹是否能够跟塔保持一定距离下使得飞机跨越外角塔和内角塔,到达下一塔间。
4.2 实验结果分析
在实地场景中我们采集到无人机开始自动巡检后的RTK 航向角数据如图9 所示,采集到EAA′-BB′的变化如图10 所示。

图9 导线平行飞行姿态控制中RTK 航向角变化趋势

图10 导线中心飞行姿态控制中EAA′-BB′变化趋势
由图10 可以看出航向角在较短的时间内能够收敛于导线走向角度,验证了其导线平行飞行的可行性。由图可以看出当EAA′-BB′超出可接受区间时能够得到反馈控制,使得下一个周期的EAA′-BB′在可接受区间,说明无人机在飞行过程中能够紧紧跟随导线弧垂走势飞行。另外我们在仿真实验中利用所设计的过塔算法,其无人机过塔飞行的轨迹如图11所示。

图11 无人机过塔飞行轨迹
由图11 可以观察其飞行轨迹如期望一致,能够在保持杆塔一定距离的情况下完成外角塔和内角塔的过塔飞行。验证了过塔飞行的可行性。
5 结论
为了解决人工操控无人机电力巡检作业的困难,我们提出利用三维激光雷达作为测距传感器、RTK 作为位置信息反馈,对无人机实现塔间导线跟随飞行、过塔飞行,从而实现无人机巡检流程全自动化。对于系统中需要实现的导线跟随飞行,我们将其飞行姿分为导线平行飞行姿态和导线中心飞行姿态,对每个姿态的不同满足条件建模得出相对应的数学表达,通过PID 控制对其飞行过程的姿态误差进行控制。另外对过塔飞行采用RTK 信息建立多塔之间的几何关系,通过该关系计算过塔飞行的路程,得出飞行控制所需的速度来实现过塔飞行。实验验证了导线跟随和过塔算法的可行性,为自动化巡检提供新的思路和解决方案。