假目标对机器视觉目标检测的影响
2021-10-26曾朝阳吴晓强
王 俊, 曾朝阳, 吴晓强
(陆军工程大学 野战工程学院, 江苏 南京 210007)
0 引言
近年来, 得益于大数据和计算机算力的巨大进步和有力支撑, 深度学习的相关理论和实际应用得到迅猛发展,并在目标检测领域大放异彩。而自动目标检测技术发展至今,一直是国防和军事领域的研究重点。相比于传统目标检测模型, 基于深度学习的目标检测模型在检测速率和检测精度上具有极大优势。因此,作为智能化武器系统的重要环节之一,基于深度学习的目标检测技术在军事领域的应用和推广一直备受世界各国的重视。
由于军事目标高度保密的特性, 目前并没有公开的军事目标数据集。关于军事目标检测的研究,学者们多是通过网络收集或自行采集军事目标图片制作数据集,存在样本数量较少的问题。 复杂的战场环境和多变的战场态势使得军事目标检测面临更严峻的考验, 由于探测手段的限制, 敌我双方想要采集对方的军事目标图片作为训练数据十分困难, 且双方在战争过程中会对己方目标采取何种伪装技术措施难以预估, 从而在根本上影响依赖于数据的基于深度学习的目标检测模型的检测效能。而假目标作为隐真示假的重要伪装技术措施之一, 在现代战争中仍发挥着影响全局的作用, 因此面对基于机器视觉的目标检测系统的探测, 基于人眼探测的假目标伪装措施会存在怎样的暴露征候是需要我们亟需探究的问题。 本文通过改变假目标的位置、背景及其颜色、大小、亮度等目标特性, 探究小样本条件下假目标在基于机器视觉的目标检测下“以假乱真”的效果,为下步战场假目标应用提供参考。
1 数据集建立
1.1 军事目标图片采集及数据扩充
利用大疆无人机在野外条件和良好光照条件下,采集了367 张军事车辆目标图片, 图片尺寸为5472×3048。为贴近实际侦察效果,拍摄时选取不同高度,不同俯仰,不同角度等进行拍摄。 图片包含树林、河流、土路、公路、居民建筑物等不同的特征背景。
通过翻转,旋转,裁剪,缩放,颜色增强等数据增强的方式将数据集扩展至1780 张,并采用labelimg 标注工具将其标注制作成PASCAL VOC 格式数据集。 采集的图像及图像标注如图1 所示,图1(c)、(d)分别为图1(a)、(b)图片标注后所对应的标签。

图1 数据集标注Fig.1 Dataset annotation
利用数据集进行训练时, 按照8:1:1 的比例随机将扩展后的军事车辆目标数据集分为训练集、 验证集和测试集。 考虑到假目标相比于真目标在光电特征上存在的差异,通过对真目标进行高斯模糊来模拟细节差异;通过叠加15%不透明度的军绿色 (#0215E21) 来模拟颜色差异;将真目标缩小为90%原面积大小以模拟大小差异。
1.2 不同位置和背景的假目标测试集
在作战区域内, 由于假目标的配置须符合真目标的战场使用要求, 其配置区域无法预判且可能因作战需求而发生变动。故需引入假目标位置和背景变化因素,在原背景中改变假目标的位置,如图2 所示。图2(b)、(d)分别为图2(a)、(c)进行目标位置变换后的图像。 将假目标按照相关配置要求置于包含其它地物特征的三个背景中,如图3 所示。

图2 不同位置测试集Fig.2 Different location testset

图3 不同背景测试集Fig.3 Different background testset
1.3 不同目标特性的假目标测试集
在作战过程中, 敌我双方对军事目标采取的各种伪装技术措施将导致目标特性发生变化, 为探究假目标颜色、大小、亮度等目标特性的改变对检测效果的影响,对假目标分别叠加20%、40%、60%、80%不透明度的军绿色(#0215E21)来改变颜色特性;通过在原基础上分别调整-150、-100、-50、50、100、150 个亮度单位来改变亮度特性;将假目标面积调整为原面积大小的0.5、0.75、1.25、1.5 倍来改变大小特性。
2 实验设计与结果分析
2.1 模型选取
现今而言,目标检测算法大致可分为三类。
(1)二阶段(two-stage)目标检测算法。 如R-CNN[1]、SPP-net[2]、Fast R-CNN[3]、Faster R-CNN[4]、FPN[5]、Mask RCNN[6]、Cascade R-CNN[7]和TridentNet[8]等。 该类算法先从输入图像中提取出可能包含目标的候选区域, 然后对候选区域进行分类, 通过边界框回归来调整边界框的大小和位置,最后利用NMS(Non-Maximum Supression,非极大值抑制)方法清除冗余框。
(2)单阶段(one-stage)目标检测算法。 如YOLO[9]、YOLO v2[10]、YOLO v3[11]、YOLO v4[12]、SSD[13]、DSSD[14]、FSSD[15]、RetianNet[16]等。该类算法则无需提取候选区域,而是将目标检测问题转换为回归问题, 直接对目标分类和边框预测进行回归分析,相对来说精度有所损失,但速度较two-stage 检测算法更快。
(3)anchor-free 目标检测算法。 如CornerNet[17]、CenterNet[18]、FCOS[19]等。 该类算法不引入锚框机制,通过全卷机神经网络得出的热点图确定目标中心点, 进而回归得出目标尺寸、3D 坐标方向、姿态信息等。
本文采用检测速率和检测精度出色平衡的YOLO v4目标检测模型,在单个目标小样本的情况下进行多次迭代训练, 选取最终迭代损失最小的权重值作为预测权重,分别对假目标的位置、背景、颜色、大小和亮度等因素变化前后的测试集进行检测,探究这些因素对检测效果的影响。
2.2 模型训练
实验条件:本实验采用基于Tensorflow 深度学习框架的YOLO v4 目标检测模型,CPU 为i9-10980XE,内存为128GB,GPU 为NVIDIA TITAN V。
对YOLO v4 网络模型进行训练,训练阶段初始学习率为0.001, 每次迭代训练100 轮, 前50 轮batchsize 为8,后50 轮batchsize 为2。 将前一次迭代得到的最低训练损失权重作为下一次迭代训练的预训练权重。
YOLO v4 目标检测网络模型多次迭代训练的训练损失值逐步收敛稳定在4 左右,选取最低训练损失值4.073所对应的权重作为检测模型的预测权重。 YOLO v4 目标检测网络模型多次迭代训练的训练损失值收敛曲线见图4。
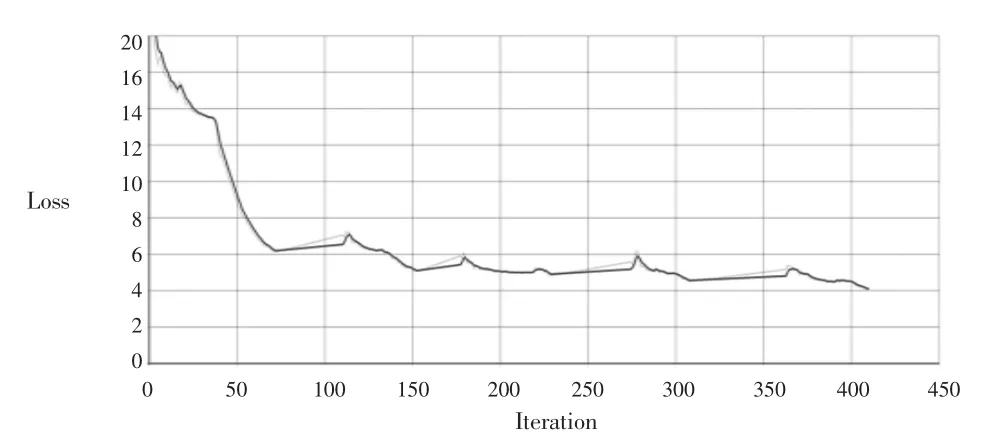
图4 YOLO v4 训练损失Fig.4 YOLO v4 Training loss
2.3 模型测试
2.3.1 实验一
将随机获得的测试集输入训练好的YOLO v4 目标检测模型中进行预测, 图中军事目标标注为Car 这一目标类别,则模型在测试集上的平均精度均值(mean Average Precision,mAP)即为该类的平均精度(Average Precision,AP),由此来衡量模型训练的好坏。平均精度(AP)越高,即该检测模型的性能越好。 平均精度(AP)从精确率(Precision)和召回率(Recall)两个方面进行衡量。
预测目标时预测值与真实值相同,记为T(True),预测值与真实值相反,记为F(False);预测值为正例,记为P(Positive),预测值为反例,记为N(Negative)。 故TP 指真实值和预测值同为正样本的样本数,TN 指真实值和预测值同为负样本的样本数,FP 指真实值为负样本但预测值为正样本的样本数,FN指真实值为正样本而预测值为负样本的样本数,见图5。

图5 模型预测Fig.5 Model prediction
(1)Precision (精 确率)和Recall(召回率):精确率又称为查准率,是针对预测结果而言的,它表示预测结果为正样本的样本中真实值也为正样本的样本所占比例; 召回率又称为查全率, 是针对测试样本而言的, 它表示真实值为正样本的样本中预测值也为正样本的样本所占比例。 计算公式如下所示:

(2)AP(Average-Precision,平均精度)和mAP(mean Average Precision,平均精度均值):AP 指Precision-Recall曲线下面的面积。 mAP 是多个类别AP 的平均值。
YOLO v4 检测模型在测试集上检测结果如图6 所示。

图6 YOLO v4 的AP 曲线Fig.6 AP curve of YOLO v4
2.3.2 实验二
对假目标位置和背景变化前后的测试集图像进行预测,检测结果见表1。

表1 位置和背景变化的检测结果Tab.1 Test results of position and background change
从表格数据中可看出:
(1)位置和背景变化前,假目标检测平均精度高达98.67%,说明在相同背景和相同位置情况下,模型将假目标识别为真目标的概率很高,假目标“以假乱真”的效果较好。
(2)位置变化使假目标的检测精度从98.67%下降至46.68%;背景变化使假目标的检测精度从98.67%分别下降为35.07%、53.27%和44.93%。
位置和背景变化后, 假目标的检测平均精度都有一定幅度的下降,但仍控制在一定程度,说明位置和背景的改变对目标检测效果有一定影响,但程度有限,模型对目标的识别主要基于目标本身特征的识别, 而不是目标与位置和背景的空间关系。
2.3.3 实验三
在假目标所处的位置和背景保持不变的情况下,对进行目标特性变化前后的假目标测试集进行模型预测,检测结果如表2~表4 所示。

表2 颜色变化的检测结果Tab.2 Test results of color change

表3 亮度变化的检测结果Tab.3 Test results of brightness change

表4 大小变化的检测结果Tab.4 Test results of size change
从表格数据中可看出:
(1)随着颜色变化程度的增大,假目标的检测平均精度从98.67%逐步下降至83.58%。可知在假目标位置和背景保持不变的情况下,单种军绿色(#0215E21)的叠加变化对检测效果的影响十分有限。
(2)假目标的检测平均精度随着亮度的增加由98.67%逐渐下降至72.5%, 随亮度的减少先上升后下降并稳定在97.88%左右。 亮度增大使得目标的部分特征丢失,导致检测准确度的下降但影响较为有限; 而亮度的降低反而能在一定程度上稍微提高检测效果。
(3)假目标的检测平均精度随大小的逐渐增大而逐步上升,但变化程度较为有限。目标特性变化后,假目标的检测平均精度波动范围较小,与真目标的检测平均精度较为接近,说明检测模型将假目标误判为真目标的概率很大。
3 结论
为探究假目标对目标检测效果的影响, 本文基于YOLO v4 目标检测模型,对比分析了假目标的位置、背景及其颜色、亮度、大小等特征变化前后的检测平均精度。结果表明,对经过多次迭代、训练效果良好的检测模型,假目标的位置和背景变化会导致检测平均精度有明显的降低,而目标特性的变化对检测效果的影响却较为有限。
当然, 上述结论只能作为基于本次实验数据集的探究结果,不具备普适意义,且实验设置的前提条件是小样本数据和未将假目标作为训练数据进行训练。 但实验结果也在一定程度上说明了目标检测模型对数据的依赖,在数据不足的情况下, 假目标和目标特性控制技术能对检测效果产生重要影响。 这一结论对军事目标检测和假目标的配置使用有一定的参考意义。