NVST垂直双光谱切换扫描系统*
2021-10-26李正刚金振宇许方宇
谭 旭,李正刚,金振宇,许方宇,袁 沭,徐 稚
(1. 中国科学院云南天文台,云南 昆明 650216;2. 中国科学院大学,北京 100049)
太阳光谱观测是研究太阳大气表面精细结构的温度、密度、磁场和多普勒速度等物理参量的重要手段[1]。传统的太阳光谱观测是针对与光谱仪狭缝对应的太阳像面狭窄区域进行长时间观测的一维定点光谱观测,主要用于太阳光谱诊断,分析由太阳内部结构各种动力学过程导致的太阳谱线轮廓出现的复杂、快速的变化[2]。这种光谱观测模式由于只能获取与狭缝对应的狭窄太阳区域的光谱,无法满足需要获取面源光谱信息的观测需求[3],因此研究人员提出了二维光谱观测模式,通过二维光谱观测,可以同时或者准同时获取日面较宽区域的光谱信息[2]。目前,二维光谱观测已经成为太阳光谱观测的主流。
实现二维光谱观测的方式主要有3种:(1)基于积分视场单元法,同时成谱成像;(2)基于窄带可调滤光器在波长方向进行扫描,先成像后成谱;(3)利用光谱仪狭缝在面源目标某一个空间方向进行扫描,先成谱后成像[2-4]。这3种二维光谱观测方式通常需要对应不同结构类型的分光设备,其中,第3种方式需基于狭缝式光栅光谱仪。
1 m新真空太阳望远镜作为我国太阳物理观测的主要设备之一[5],配备一台多波段光谱仪在可见光波段对太阳进行光谱观测,一台大色散光谱仪在近红外波段对太阳进行光谱观测,两台光谱仪都是狭缝式光栅光谱仪。为了实现二维光谱观测,1 m新真空太阳望远镜采用第3种方式,即狭缝扫描观测。1 m新真空太阳望远镜终端仪器系统的结构如图1,其中,两台光谱仪垂直分布在望远镜光谱筒内,也叫垂直式光谱仪。多波段光谱仪与大色散光谱仪的色散方向相互正交,且两者对应同一个狭缝位置,因此两台光谱仪不能同时观测,切换光谱仪时,根据需要更换狭缝并旋转90°,同时切换光谱仪的准直镜。在不同光谱仪的扫描观测之间进行切换时,系统需要改变光谱扫描的方向。

图1 1 m新真空太阳望远镜终端仪器系统结构Fig.1 Structure of NVST′s terminal instrument system
基于1 m新真空太阳望远镜实现二维光谱观测的需求以及光谱仪系统的具体结构形式,本文设计了望远镜垂直双光谱切换扫描系统,既能实现二维光谱观测,同时也参与两个光谱仪之间的切换。1 m新真空太阳望远镜配备的其他终端仪器还包括多通道成像系统、高分辨率磁像仪以及自适应光学(Adaptive Optics, AO)系统等。垂直双光谱切换扫描系统位于自适应光学系统与其他仪器之间,起到对接自适应光学系统与后端仪器的作用。
1 垂直双光谱切换扫描系统实现二维光谱扫描观测的原理
采用狭缝扫描方式对太阳进行二维光谱扫描观测时,太阳像面相邻区域依次通过焦面狭缝[6-7],如图2(a)。电荷耦合器件(Charge-Coupled Device, CCD)对每一区域的光谱信息依次曝光并由计算机进行数据采集,最终得到目标面源的光谱信息[8]。图2(b)展示了光谱信息包含两个空间维度和一个波长维度,两个空间维度分别为狭缝方向和扫描方向。
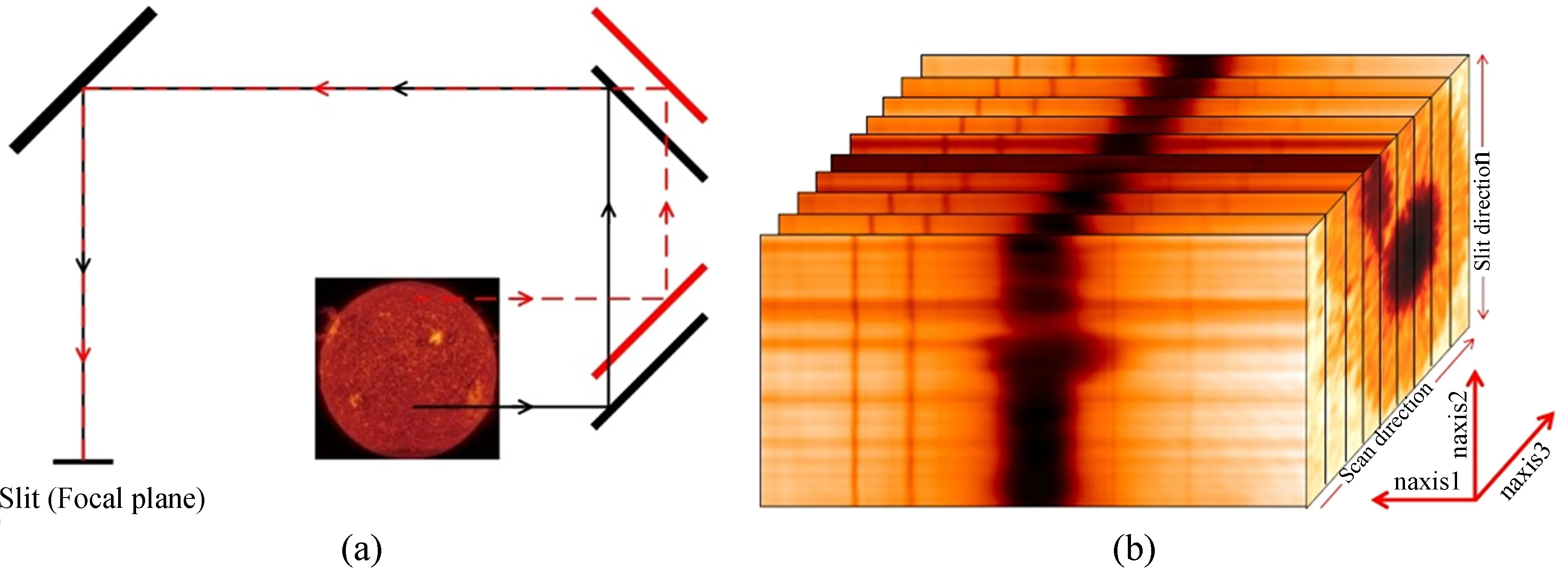
图2 二维光谱扫描观测原理[2]。(a)二维光谱观测的狭缝扫描方式;(b)二维光谱观测获得的光谱三维信息
图3为1 m新真空太阳望远镜光谱观测系统的整体结构示意图。1 m新真空太阳望远镜包含两个正交的光谱仪,图中只展示其中一个,用于描述光谱扫描观测的工作原理和过程。扫描系统包含A1,B1和A2,B2两个相互垂直的平面反射镜组,其中A2,B2镜组垂直于纸面向内。望远镜收集的太阳光束经过中继模块平面反射镜M8进入自适应光学系统,光束从自适应光学系统出射后,依次经过扫描系统、中继模块平面反射镜M9进入焦面狭缝,通过狭缝的光束经准直镜后,反射至光栅进行分光,然后经成像镜反射至CCD曝光,并由计算机采集数据。扫描系统执行任务时,首先由计算机根据预设的观测模式发送指令到电机驱动器,驱动器根据接收的指令控制扫描系统中的步进电机按指定模式运动,带动两组平面反射镜中的一组平移运动,从而实现二维光谱扫描观测。

图3 1 m新真空太阳望远镜光谱观测系统结构示意图Fig.3 Structure of NVST′s spectral obervation system
1 m新真空太阳望远镜有两个相互正交的光谱仪,当切换不同光谱仪工作时,将狭缝旋转90°(根据观测需求更换不同缝宽的狭缝),并更换场镜,同时负责上一个光谱仪扫描任务的扫描镜组在步进电机的带动下恢复零位,由与之垂直的另一组平面反射镜组执行扫描观测任务。
1 m新真空太阳望远镜二维光谱扫描观测采用步进扫描模式[9]。观测过程中,探测器每采集一个狭缝区域的数据,移动狭缝到下一区域继续采集。狭缝相对太阳像面的移动实际由太阳像面在垂直于狭缝的方向移动实现,太阳像面的移动由扫描系统步进电机带动扫描镜组做步进平移实现,步进平移的距离与狭缝宽度相对应。
2 光机结构设计
2.1 结构设计
1 m新真空太阳望远镜垂直双光谱切换扫描系统的功能需求包括实现正交方向的二维光谱扫描观测任务以及实现自适应光学系统与多通道成像系统、磁像仪和光谱仪系统对接,保证这些终端仪器工作时其物面分别与自适应光学系统的像面重合。图1显示了1 m新真空太阳望远镜仪器系统的整体结构,其中多通道成像系统和自适应光学系统分布在仪器上平台两侧,仪器上平台下方为光谱筒,多波段光谱仪和大色散光谱仪正交布置在光谱筒内,磁像仪也吊装在光谱筒内。从图1可以看出,自适应光学系统出射光与多通道成像系统前端光轴没有重合,图上显示的只是高度方向不重合,在实际三维空间中,自适应光学系统出射光与多通道成像系统的前端光轴存在水平和垂直两个方向的偏差。当光谱仪工作时,自适应光学系统出射光应对准平面反射镜M9,将光束反射到狭缝处。M9镜中心理论上位于多通道成像系统、光谱仪和磁像仪的前端光轴上。此外,自适应光学系统出射光像面和各终端仪器物面不共面,存在偏差。
基于上述功能需求,垂直双光谱切换扫描系统采用图4的结构。主体结构由两组相互垂直的反射镜组模块组成,合理设置扫描系统结构的相关尺寸参数和反射镜之间的位置参数,使自适应光学系统出射光与多通道成像系统前端光轴重合,并保证自适应光学系统出射光像面与各终端仪器物面齐焦面。通过光路分析以及现场实测得出扫描系统结构的具体尺寸参数、反射镜之间的位置关系。
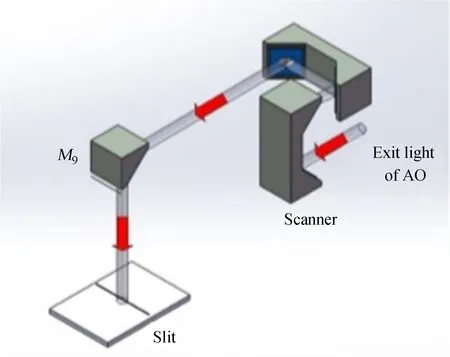
图4 垂直双光谱切换扫描系统结构Fig.4 Structure of switching and spectral scanning system of the vertical double spectrometer
图5为所设计的垂直双光谱切换扫描系统三维模型。图5(a)为整体结构三维模型,包含垂直方向和水平方向两组正交的反射镜组模块,分别执行大色散光谱仪和多波段光谱仪的二维光谱扫描观测任务。两组反射镜通过相应的步进电机驱动。两组模块结构形式大体一致,在水平方向镜组上配备调焦机构,可以通过调整水平方向镜组与垂直方向镜组之间的距离来调节光束在扫描系统中的光程,从而调节自适应光学系统出射光焦面的位置,满足自适应光学系统出射光与后端仪器齐焦面的需求。图5(b)为水平方向反射镜组模块爆炸视图。
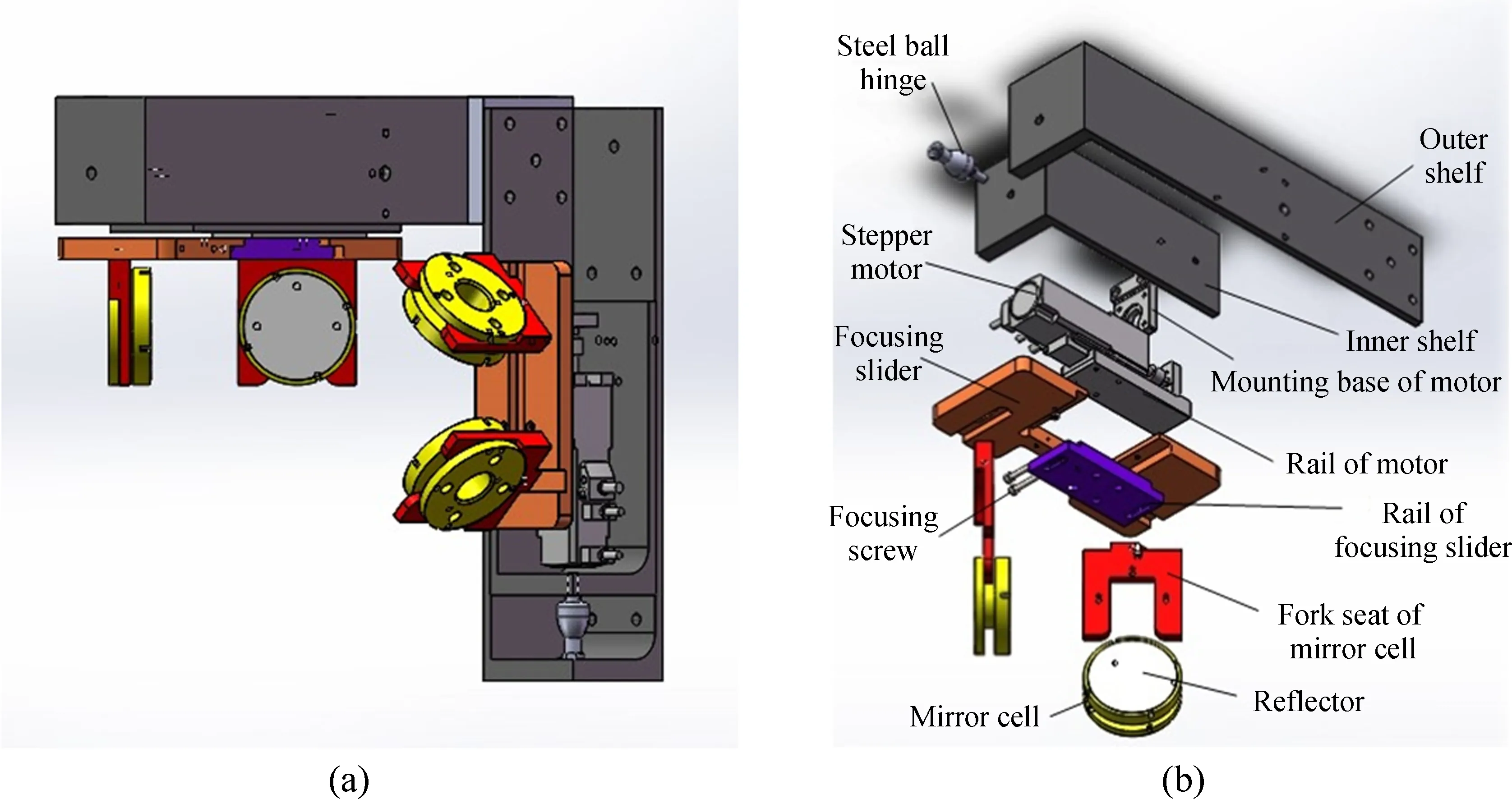
图5 垂直双光谱切换扫描系统三维模型。(a)整体三维结构;(b)水平方向反射镜组模块爆炸视图
步进电机安装在内层槽架上,内层槽架通过钢珠铰链安装在外层槽架上,内层槽架相对外层槽架有多个偏转自由度可调。反射镜组通过调焦板安装导轨安装在电机导轨上。调焦板的作用是调节水平方向和垂直方向镜组之间的距离,使自适应光学系统出射光焦面与后端仪器物面齐焦面,通过调焦板与调焦板安装导轨之间的螺丝进行调节。反射镜位置可以通过镜室叉与调焦板上的滑轨滑动调节,此外,反射镜姿态相对于镜室叉可调。
2.2 焦面处太阳像斑的移动步幅与扫描镜组位移量的数值关系。
光谱扫描观测时,焦面处太阳像斑的移动步幅应与狭缝宽度相等。平面反射镜组在步进电机驱动下的移动步幅与焦面太阳像斑移动步幅的数值关系如图6和图7。
图6表示当大色散光谱仪进行光谱扫描观测任务时,扫描系统水平方向镜组处于零位,垂直方向镜组做步进平移执行扫描任务。此时水平方向镜组不运动,以图6(a)中x轴负方向为视图方向,分析垂直方向镜组移动步幅与焦面太阳像斑移动步幅的数值关系。根据图6(b),垂直方向镜组在y轴正方向移动距离d,焦面太阳像斑同时在z轴负方向移动距离2d。

图6 垂直方向镜组移动步幅与焦面太阳像斑移动步幅的数值关系。(a)视图方向;(b)数值关系
当多波段光谱仪进行光谱扫描观测任务时,扫描系统垂直方向镜组位于零位,水平方向镜组做步进平移执行扫描任务。此时垂直方向镜组不运动,以图7(a)中y轴负方向为视图方向,分析水平方向镜组移动步幅与焦面太阳像斑移动步幅的数值关系。根据图7(b),水平方向镜组在x轴负方向移动距离d,焦面太阳像斑同时在x轴负方向移动距离2d。

图7 水平方向镜组移动步幅与焦面太阳像斑移动步幅的数值关系。(a)视图方向;(b)数值关系
3 性能测试
基于1 m新真空太阳望远镜光谱仪的结构参数和观测需求,扫描系统相关性能要求在焦面狭缝处满足:
(1)扫描最小步长25 μm;
(2)扫描速度0.044~3.33 mm/s;
(3)最小扫描范围25.34 mm(约对应太阳像面1.9′);
(4)扫描过程中图像偏移量的均方根小于扫描步幅的1/10。
其中,第1~3条通过选择合适的步进电机来满足要求。根据焦面处太阳像斑的移动步幅与扫描镜组位移量的数值关系,电机导轨移动步幅d,望远镜焦面F3处,即光谱仪狭缝处光斑移动距离2d。因此,步进电机应满足最小移动步幅25÷2=12.5 μm;移动速度0.022~1.665 mm/s;最小移动范围25.34÷2=12.67 mm。根据上述要求,我们选取东方马达DRS2系列DRSM42RG-04A2AZMK型步进电机,性能参数见表1。电机最小移动步幅0.001 mm,最高速度可达50 mm/s,最大移动距离(冲程)40 mm,满足第1~3条的性能需求。

表1 步进电机参数Table 1 Parameters of stepper motor
对于性能要求的第4条,我们对设计完成的垂直双光谱切换扫描系统进行了实验测试,具体的测试内容包括3项:系统稳定性、扫描过程直线度和扫描步幅精度。实验中,通过在扫描系统前端架设激光光源,利用1 m新真空太阳望远镜仪器平台现有的成像通道进行数据采集,分析采集数据的质心来测试扫描系统的性能。
3.1 系统稳定性
望远镜在进行观测任务时,除了仪器自身的误差外,仪器平台震动、光路中空气湍流、CCD相机散热风扇导致的抖动都影响光学系统的稳定性,在CCD上表现为图像的随机抖动。在对扫描系统进行扫描的直线度和步幅精度进行测试前,我们需分析上述因素导致的随机误差,评估仪器系统的稳定性。
实验时,保持扫描系统反射镜组静止,在2 s内采集100幅图像。实验所用激光光源在CCD上的光斑直径约30个像素,CCD每个像素对应6.5 μm,所以光斑直径约为195 μm。图8(a)为扫描系统反射镜组静止时,由随机误差导致的光斑抖动情况。图中x轴和y轴表示光斑质心在CCD上的坐标,单位为像素。红色星号为光斑抖动时的质心分布,蓝色三角形为取所有点x坐标和y坐标平均值得到的均值点,以该点为基准分析光斑的抖动范围,得到光斑质心相对于基准点的偏差如图8(b)。最大偏差约为1.5像素,9.75 μm,所有点相对于基准点的偏差均方根值为0.625像素,4.06 μm。考虑到光斑尺寸约为195 μm,均方根远小于光斑大小的1/10,因此系统稳定性满足要求。

图8 系统稳定性测试结果。(a)扫描系统静止时光斑质心分布;(b)光斑质心相对于基准点的偏差
3.2 直线度与扫描步幅精度
光谱扫描观测过程中,扫描路径的直线度以及扫描步幅精度是衡量系统是否满足观测要求的关键指标。1 m新真空太阳望远镜垂直双光谱切换扫描系统通过垂直方向和水平方向两组相互正交的反射镜组分别执行大色散光谱仪和多波段光谱仪的扫描观测任务,因此需分别分析两种观测模式下扫描的直线度和扫描步幅精度。直线度参考垂直于扫描方向的图像偏移量,扫描步幅精度参考沿扫描方向步幅大小的偏差。
根据焦面处太阳像斑的移动步幅与扫描镜组位移量的数值关系,电机导轨移动步幅d,望远镜焦面F3处,即光谱仪狭缝处光斑移动距离2d。实验中,控制扫描机构的电机导轨每步移动150 μm,移动60步,共9 000 μm。望远镜焦面F3处光斑每步移动300 μm,根据成像系统放大率25/40,CCD上光斑每步移动距离为187.5 μm,在CCD上移动的总距离为11 250 μm。图9和图10分别为大色散光谱仪和多波段光谱仪的扫描直线度与扫描步幅精度的实验数据,对应到扫描系统反射镜组上,分别为移动垂直方向反射镜组时扫描直线度与扫描步幅精度的实验数据,以及移动水平方向反射镜组时扫描直线度与扫描步幅精度的实验数据。

图9 大色散光谱仪的扫描直线度与扫描步幅精度。(a)扫描轨迹;(b)y坐标分布;(c)x坐标分布
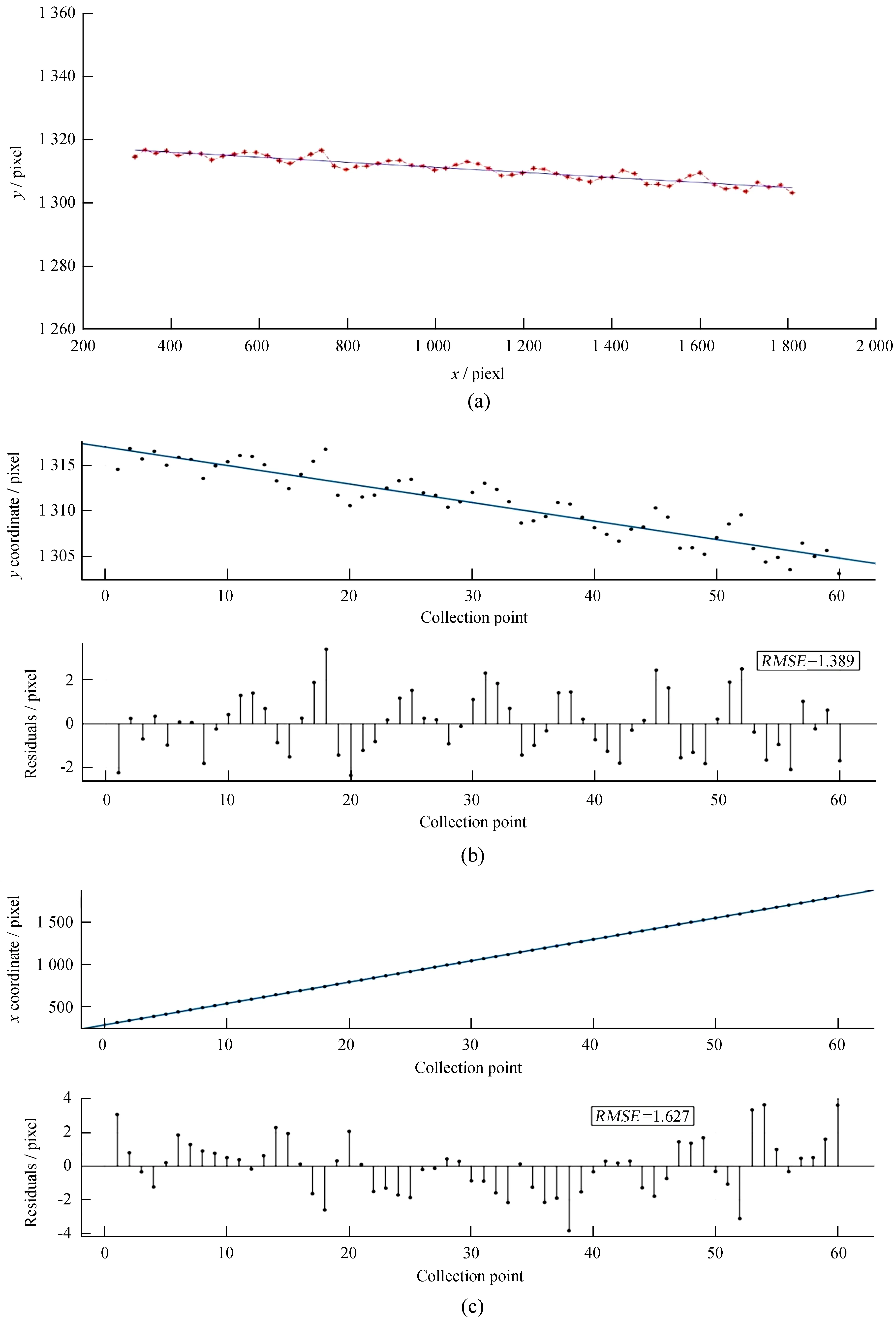
图10 多波段光谱仪的扫描直线度与扫描步幅精度。(a)扫描轨迹;(b)y坐标分布;(c)x坐标分布
图9(a)为移动垂直方向反射镜组时的扫描轨迹,即扫描过程中光斑在CCD上的质心轨迹。由于实验中CCD的边缘与扫描轨迹不完全平行或垂直,CCD上的质心拟合轨迹存在一定斜率,这种情况在两个测试实验中都存在。该斜率较小,对分析结果的影响可忽略。图9(b)上图为光斑质心在CCD上y坐标分布及线性拟合,下图为光斑质心y坐标相对于拟合值的残差图。图9(b)为光斑质心在垂直于扫描方向的偏差,均方根误差为1.044。图9(c)为扫描方向上的扫描步幅偏差,其中,图9(c)上图为光斑质心在CCD上x坐标分布及线性拟合,下图为光斑质心x坐标相对于拟合值的残差图,其均方根误差为1.105。
图10(a)为移动水平方向反射镜组时的扫描轨迹。实验中,该扫描轨迹与移动垂直方向反射镜组时的扫描轨迹在CCD上的方向垂直,这里为了便于分析和对比,将x坐标值和y坐标值进行了对换。图10(b)为光斑质心在垂直于扫描方向的偏差,均方根误差为1.389, 图10(c)为扫描方向上的扫描步幅偏差,均方根误差为1.627。
实验数据表明,两种模式下的直线度和扫描步幅偏差的均方根误差都在1~2像素之间,最大偏差的均方根为1.627,约为10.58 μm。根据1 m新真空太阳望远镜二维光谱扫描观测对扫描系统的性能要求,扫描时图像偏移量的均方根应小于扫描步幅的1/10,实验结果显示的图像偏移量的均方根相对于187.5 μm的步幅长度和195 μm的光斑尺寸,其大小在允许的范围内,因此,扫描系统扫描时的直线度和扫描步幅精度满足要求。
4 总 结
本文基于1 m新真空太阳望远镜二维光谱扫描观测的需求,设计了一套垂直双光谱切换扫描系统,实现光谱扫描观测的同时两台光谱仪自动切换,并起到自适应光学系统与各终端仪器对接的作用。我们对设计完成的垂直双光谱切换扫描系统进行了加工装调并初步完成了与自适应光学系统及终端仪器系统的对接。扫描系统性能测试实验表明,系统能够实现指定的运动,扫描精度满足要求,符合设计预期。
当前的实验测试是以激光作为点光源,多通道成像系统作为数据采集通道,所以并不能完全替代实际的太阳光谱扫描观测过程。因此下一步的工作需进一步测试扫描系统在实际太阳光谱扫描观测时的性能,并根据测试结果对扫描系统进行优化调节以进一步提高性能,确保1 m新真空太阳望远镜稳定可靠地进行太阳光谱扫描观测。
