飞机起落架舱门作动同步控制研究
2021-10-25赵兴平
赵兴平,彭 纲,常 凯,秦 成,李 巍
(1.航空工业第一飞机设计研究院,西安710089;2.航空工业金城南京机电液压工程研究中心,南京211106)
0 引言
随着航空工业技术的发展,飞机的起落架舱门作动系统都需要更高的可靠性和安全性。设置余度是提高系统和部件可靠性的主要方法,广泛应用于航空航天领域,通过采用双余度作动器驱动控制,整个系统的可靠性及安全性将会得到快速提高并且不会带来过大的代价[1]。
某飞机起落架舱门作动系统采用双余度作动器并联驱动形式,其具有输出力大、故障瞬态小、对故障检测要求低等优点。并联驱动形式中的双路作动器共同驱动飞机同一个起落架舱门结构时,由于控制系统、作动器的各方面误差积累等会导致两路输出不一致,带来了同一舱门作动面两个作动器间的运动不同步问题,严重时两个作动器位移差值较大,极端情况下可能导致舱门结构产生形变乃至撕裂。两个舱门作动器的运动不同步给起落架舱门作动系统的性能带来了许多不利的影响,不仅造成了额外的无用功消耗,使舱门结构内产生了较大的交变内应力,而且长时间累积会使起落架舱门结构面发生扭曲变形,严重时还会引起飞机起落架舱门结构疲劳甚至破坏[2]。
目前国外电传飞机均已应用了各种均衡控制方法来解决类似的双路作动器力运动不同步问题,均衡控制就是针对作动器运动不同步问题,通过监控作动器负载情况调节各运动控制通道的参数,产生控制通道间偏差指令去均衡作动器间相互抗争负载,从而缓解不同步现象[3]。Schaeffer W S[4]描述了B2轰炸机飞控系统通过仿真分析作动器动态运动调整过程,利用积分均衡控制算法迫使各通道压力趋向一致,以达到双路作动器同步运动的目标。国内对余度作动系统的运动不同步问题也开展了研究:范殿梁等[5]利用AMESim软件对主主式舵机驱动运动进行了建模仿真分析,分析了舵机运动不同步的原因及解决办法;付永领等[6]提出了采用均衡控制算法去解决伺服作动系统的多个作动器运动纷争问题;郭巍[7]对作动器运动不同步原因进行了分析,最后采用均衡控制算法来缓解。
本文对起落架舱门作动系统力纷争产生的原因进行了分析,提出了基于等量分流式、伺服闭环、双作动器容积串联等3种同步控制方法,对各类同步控制方法建立了仿真模型进行分析,最后搭建试验平台对3种控制方法进行了试验验证。
1 系统建模与分析
1.1 系统工作原理
图1 所示为飞机起落架舱门作动系统的物理模型。该飞机起落架舱门作动器由单一的液压能源供压,起落架舱门采用双作动器驱动,2个独立的作动器与同一块飞机起落架舱门连接,共同驱动完成起落架舱门收放运动,油路设置节流阀调节作动器运动速度,作动器活塞杆伸出表示起落架舱门打开,缩回表示起落架舱门关闭。两个作动器的未知同步误差要求不大于1%。

图1 起落架舱门作动系统原理
1.2 系统建模
LMS Imagine.Lab AMESim软件是用于解决系统工程建模、仿真和动态特性分析的图形化开发软件,采用AMESim作为液压及电气控制的仿真建模环境,在AMESim中建立飞机起落架舱门作动系统的仿真模型,分别设置飞机起落架舱门作动系统中作动器及运动控制逻辑信号,主要部件模型参数如表1所示。设置重力、平均气动载荷力和预紧弹簧力后,选定仿真算法和仿真时间,仿真过程中将作动器的状态信息(速度、位移)输出。对系统中各个部件建模并结合系统流量方程搭建飞机起落架舱门作动系统模型如图2所示。模型建立后利用AMESim中的Submodel Mode为系统模型中全部元件进行数学模型的关联。由于参与飞机起落架舱门作动系统控制的液压油油液流动为非恒定流,因此建模时充分考虑了管路长度及管路中油液的粘度、压缩性及质量特性[8]。

表1 主要部件模型参数
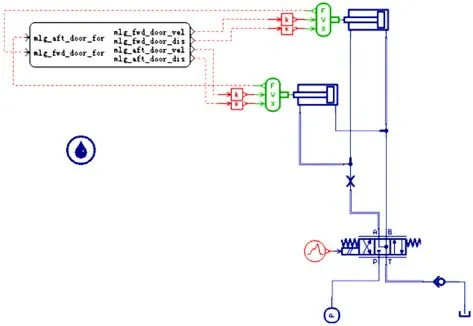
图2 飞机起落架舱门作动系统模型
根据搭建的飞机起落架舱门作动系统模型,对系统运行过程中作动器的动态性能进行仿真分析,如图3所示。由仿真结果可以看出,两路作动器的输出位移在运动过程中不同步,而当输出位移稳定之后会达到同步状态。输出位移不同步的存在不仅对作动机构造成额外的负担,而且这么大的力会一直施加在飞机结构上,长期下去加剧飞机起落架舱门结构的疲劳破坏,所以两路作动器的运动不同步问题必须要重点考虑。
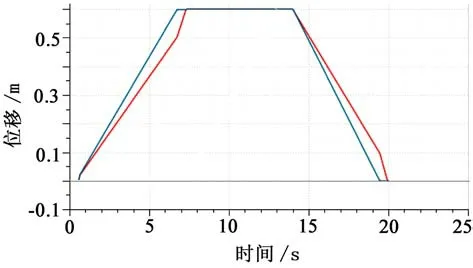
图3 两路舱门作动器位移-时间运动曲线
两路舱门作动器不同步主要是由于部件加工、安装误差和运动控制通道中各种误差的积累和联合作用,使得在操纵过程中每个通道的输入信号相同,控制端的每个作动器的输出位移却往往不一致,造成一个作动器拖动另一个作动器,作动器同一时间运动位置不同步的现象。系统增益误差、物理运动误差、作动器工艺误差等都是导致运动不同步的原因[9]。
基于以上原因进行研究,解决两路舱门作动器运动同步控制的方法主要有:(1)采用等量分流阀实现两路作动器输入流量的动态均衡分配,从而实现作动器的位置同步;(2)采用基于位移反馈的压力伺服控制方法,提高双作动器位移同步精度;(3)将一个作动器的无杆腔串联至另一个作动器的有杆腔,以达到流量等量分配驱动作动器同步运动。
2 飞机起落架起落架舱门作动同步控制
2.1 基于等量分流式的同步控制
基于等量分流式的起落架舱门作动系统同步控制是采用一个等量分流阀,通过其固定节流孔进行流量控制,利用不同流量在各自固定节流孔上产生的压差作为力反馈推动阀芯,实现流量的动态均衡分配,从而实现作动器的位置同步功能。
等量分流阀式同步控制模型如图4所示,仿真结果如表2所示。研究结果发现负载越大时节流阀压差越大,双作动器的同步误差越大。
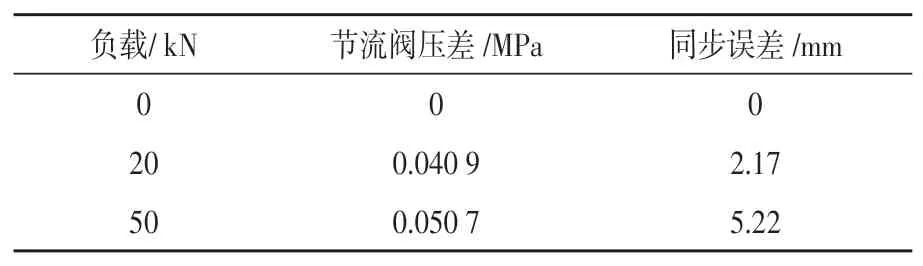
表2 基于等量分流式的同步控制仿真结果
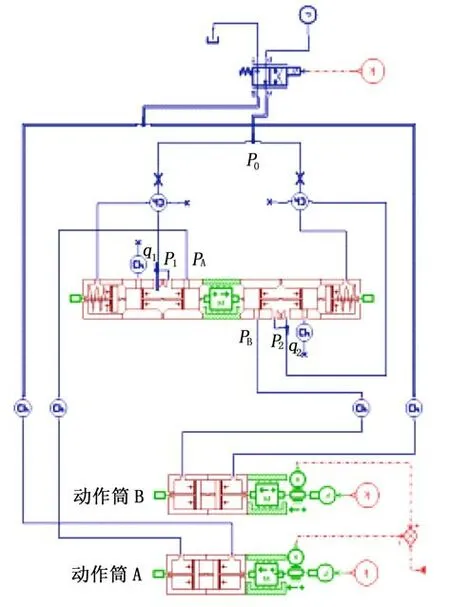
图4 基于等量分流式的同步控制模型
2.2 基于伺服闭环的同步控制
起落架舱门运动的伺服闭环作动系统主要包括伺服阀、作动器和控制器,伺服阀接收控制器发出的控制指令后输出流量给作动器使作动器输出位移,通过位移传感器反馈到控制器指令输入端构成闭环控制,输出位移最终转化至起落架舱门结构运动[10]。
2个伺服阀分别驱动两个作动器,控制过程中作动器的位移、压力值通过传感器信号分别实时反馈至控制器,控制器接收到信号后经过运算、数模转换并放大后提供给伺服阀输出相应的流量驱动作动器运动。
根据飞机起落架舱门伺服控制系统的数学模型,在LMS Imagine.Lab AMESim环境中建立飞机起落架舱门作动系统的仿真模型,分别设置飞机起落架舱门作动系统中作动器及运动控制逻辑信号如图5所示。

图5 基于伺服闭环的同步控制模型
为减缓两个作动器间的运动不同步问题,在伺服作动系统加入了控制算法去均衡负载带来的不同步。起落架舱门作动系统采用跨通道均衡控制算法,即利用额外的反馈回路产生信号来减小通道间的不匹配,通过闭环控制使各个通道的压力趋于相同,从而达到作动器同步运动的目的。对两个起落架舱门作动器间的相互抗争负载跨通道均衡控制时首先通过传感器采集两个作动器各通道的参数,经运算产生通道间的偏差指令,最终调节两作动器压差之差来实现均衡。负载压差的均衡原理如图6所示,其中Δp为作动器两腔压差,ΔDp为作动器间的两腔压差之差。

图6 均衡控制原理
将两作动器间的ΔDp作为反馈输入控制参数,经过比例积分环节,将两个积分输出值形成对超前作动器的负位移增量指令和对滞后作动器的正位移增量指令分别反馈至作动器的控制信号输入端,从而减小作动器间的不同步位移来达到同步控制。
仿真结果如表3所示,研究发现伺服闭环控制方法具有较高的位置同步控制性能,载荷差的变化对伺服闭环控制下的起落架舱门作动系统同步性能影响较小。

表3 基于伺服闭环的同步控制仿真结果
2.3 基于容积串联的同步控制
基于容积串联的起落架舱门作动系统的同步控制方法是将一个作动器的有杆腔与另一个作动器的无杆腔串联起来,系统供压后两个作动筒的流量可实现动态均衡分配,使得两个作动器的输出位移保持同步。容积串联式同步控制模型如图7所示,仿真计算结果如图8所示。

图7 基于容积串联的同步控制模型

图8 基于双作动器容积串联的同步控制仿真结果
根据仿真结果,基于双作动器容积串联的同步控制最大位置同步误差4.5 mm,作动器总行程为500 mm,即0.90%的误差率,可满足系统同步误差不大于1%的要求。
3 试验验证
以起落架舱门作动系统为对象搭建试验平台,试验平台模拟了作动系统的技术参数,测试了3种控制方法下的两个作动器的运动同步控制情况,试验结果如图9所示。
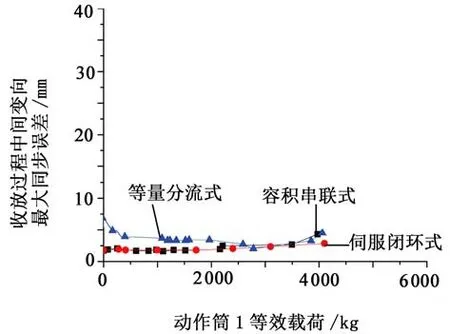
图9 试验结果
试验结果表明:基于等量分流式的同步控制系统同步性能受载荷影响差异明显,同步精度在空载或载荷较小时误差较大;基于伺服闭环、容积串联式的同步控制系统同步性能受载荷变化的影响较小,误差范围为2.1~4.8 mm,同步精度约为0.5%~1%。
4 结束语
本文从飞机起落架舱门作动系统原理出发,建立了飞机起落架舱门作动系统模型,分析了两个舱门作动器的运动不同步原因。研究了基于等量分流式、伺服闭环和容积串联的同步控制方法,搭建了不同控制方法的模型进行仿真分析,试验验证了不同控制方法下的控制效果,仿真及试验结果表明:
(1)基于伺服闭环的双作动器运动同步控制方法同步精度最高,但是伺服闭环控制系统组成复杂,包含附件产品多,会造成系统基本可靠性低;
(2)等量分流式的控制方法关键在于等量分流阀的研制,目前国内没有案例,研制困难,且该控制方法下同步精度受负载影响较大;
(3)基于容积串联式的控制方法同步精度虽然没有伺服控制方法高,但是可满足系统要求,基本可靠性和成熟度响度较高。