螺旋桨叶片的逆向设计方法研究*
2021-10-25翟欢乐唐家兴
翟欢乐,唐家兴
(江苏航空职业技术学院工程学院,江苏镇江212000)
0 引言
现如今,无人机已不像从前一样单一的用在军事方面,在民用领域也大放异彩,诸如农业植保、高空摄影、电力巡检、特殊环境监测、灾后救援等方面[1]。无人机螺旋桨,作为无人机动力装置的重要部件,是保证无人机安全性能的重要组成部分,但同时也是无人机生产厂商严格控制和封锁的重要核心技术。螺旋桨叶片如图1所示,叶形呈空间自由曲面状,通过正向设计方法很难得到叶片的三维CAD模型,利用逆向工程技术,获取精确的螺旋桨叶片曲面模型,对螺旋桨再加工以及缩短新模型的研制周期及其制造成本有很大的现实意义[2]。

图1 螺旋桨叶片
逆向工程技术的流程为点云采集、点云处理、模型重建及误差分析。点云处理领域,刘宇[3]提出的基于法矢的点云拼合方法,由高斯映射不变量寻找对应点,再根据对应点间刚体变换的聚类特性来剔除错误的对应关系,通过迭代计算拼合的刚体变换;孙世为[4]提出的基于曲率RGB的多视点云拼合方法,遵循实物内部拓扑不变性,由曲率的RGB值来选取拼合的重叠子集,通过改进的ICP算法来实现重叠子集的拼合,实现了在目标点云中局部最优的整体拼和。模型重建领域,邢悦[5]针对曲面重构过程中存在曲面优化工作繁琐且曲面精度难以达标等问题,提出一种以偏差检测为指导的快速曲面优化方法;杨宝华[6]利用CATIA V5对航空发动机叶片进行了计算机辅助逆向设计,提出以“特征线”为中心进行完整连续的曲面重构的方法;马荣影、储江伟等[7]针对气力推进艇螺旋桨叶片的逆向设计进行研究,通过提取轮廓线来构建曲面网格,然后进行拟合、建模及误差分析;赵小敏[8]利用Geomagic Studio软件中的形状模块功能和fasion功能模块来修复原始损伤桨叶的各种缺陷,从而创建高质量的桨叶曲面。误差分析领域,刘静娜[9]建立了多个子曲面,通过对子曲面的误差控制来提高曲面精度。本文选择螺旋桨的一个叶片作为研究对象,借助Geomagic软件研究点云的拼合过程、模型重建的不同方法。
1 点云拼合
对螺旋桨叶片前后面分别进行扫描及去噪处理,得到点云A与点云B,两块点云的重合区域仅为四周部分,如图2所示。点云拼合有两种方法,一是人为建立对应特征点进行拼合,具有较高的效率;二是根据点云的重合区域曲率特性进行拼合,具有较高的精度。为同时提高拼合效率及拼合精度,本文针对螺旋桨叶片点云的拼合采用两步拼合法:第一步为利用特征点的点云粗拼合,第二步为利用曲率特性的点云精拼合。

图2 螺旋桨叶片点云
1.1 特征点粗拼合
将点云A作为固定点云,点云B作为浮动点云。在点云A的四周重合区域选取5个特征点,并在点云B对应位置选取5个特征点,如图3所示。
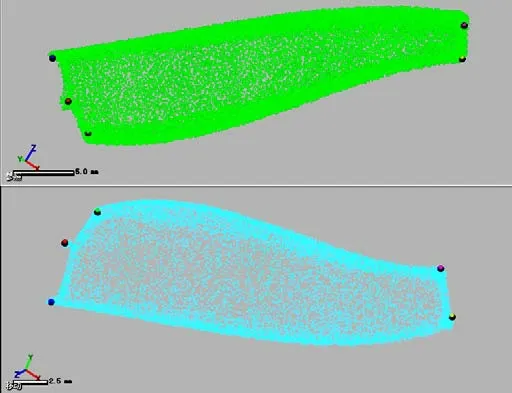
图3 选取特征点
根据5对特征点的参数信息求解点云A与点云B的坐标变换旋转矩阵R与平移矩阵T。
旋转矩阵R可表示为:
平移矩阵T可表示为:

1.2 点云精拼合
利用Geomagic软件自带的点云整体对齐工具进行精拼合,设置迭代次数及最大平均偏差,依据点云重合区域的曲率相同特性,进行点云的对齐,选取叶片的两个截面来评估拼合效果,如图4所示,可判定两块点云的重合效果较好。
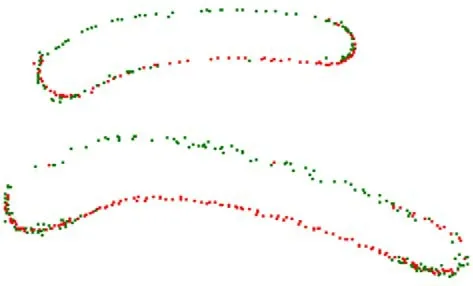
图4 点云拼合效果
2 重建模型
重建模型采用两种方法,一是刷取法,直接用点云去生成面片,再通过领域刷取生成曲面体;二是曲线法,由点云封装、样条曲线绘制等,对曲线分割后通过曲面填补来生成曲面体。
2.1 刷取法重建模型
(1)生成面片模型:通过对几何形状捕捉精度的调节,来提高面片模型准确度。
(2)进行轮廓提取:首先选择与模型平行的平面作为基准平面进行轮廓投影,得到参考轮廓线,再使用直线、样条曲线、圆角等尽可能平滑地绘制出叶片的闭合轮廓线草图,最后使用Accuracy Analyzer检查分离点。
(3)生成胚体:得到轮廓线后进入胚体生成阶段。在面片模型的下方拉伸出一个完全覆盖模型的实体矩形,再将上一阶段得到的轮廓草图拉伸为面片,作为工具切割该实体,最后将得到一个外轮廓与模型相同的实体。
(4)领域刷取:用笔刷工具在面片体的上下两面进行领域的刷取与修正。根据不同位置的曲率将两个面都分为若干个不同的领域,对每个领域进行面片拟合并调整曲面大小与角度,生成若干曲面。
(5)生成模型:将同一面的拟合面片进行曲面修剪合并生成一个完整曲面,将曲面体作为工具去修剪胚体,得到螺旋桨实体雏形,再进行局部细化处理即得到最终模型,如图5所示。
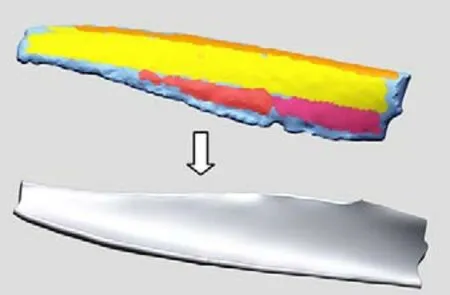
图5 刷取法重建模型
2.2 曲线法重建模型
(1)曲线绘制:沿着表面绘制样条曲线,尽可能地绘制成闭合线圈。在曲率变化较小的区域绘制的曲线稀疏,在曲率变化较大的区域绘制的曲线密集,交错形成四边形。
(2)曲线分割:对曲线进行调整,使其更贴合面片体表面,且曲率变化尽可能的小;使用分割命令,对曲线进行交叉点处的分割,形成若干小四边形。
(3)曲面填补:对每个小四边形逐一进行面填补,全部填补完成后进行曲面缝合,得到曲面体。
(4)生成模型:将封闭的曲面体直接生成三维模型,再进行局部细化处理即得到最终模型,如图6所示。
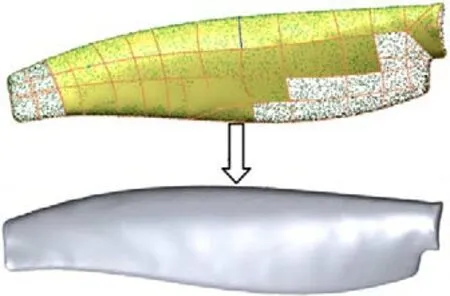
图6 曲线法重建模型
3 误差分析
针对两种方法重建的模型进行直观比较,曲线法重建的模型更加光顺,与实物更相似;刷取法重建的模型在轮廓上有缺陷,主要是由于部分区域点云缺失导致。
针对重建模型与点云数据进行误差分析,分别在刷取法和曲线法重建的曲面体上各截取了12条曲线,每一条曲线与点云的偏差如图7所示,针对每一条曲线与点云的偏差取平均值,可得到重建模型与点云的误差情况,如图8所示。通过比较发现,两种方法重建的模型与点云数据相比,误差分布情况相差不大,但与实物相比,曲线法重建的模型误差明显小于刷取法重建的模型误差。

图7 截面曲线与点云的偏差
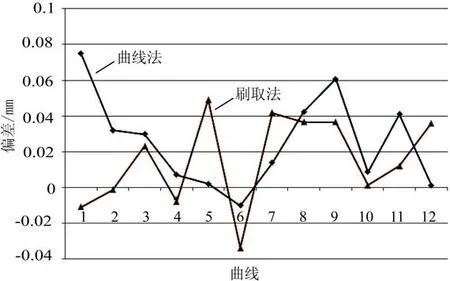
图8 重建模型与点云的误差
4 结束语
(1)先建立特征点进行粗拼合,再根据曲率特性进行精拼合,能够使得螺旋桨叶片点云的拼合同时具有较高的拼合速度和拼合精度。
(2)刷取法重建模型的优点是操作简单;缺点是仅适用于质量较高的点云,当点云质量不高时,生成的曲面体比较扭曲,边缘处会产生许多缺陷。
(3)曲线法重建模型优点是由于操作时加入了正向设计理念,对点云的适用性较强,能克服局部点云缺陷问题,生成的曲面与实物更相符;缺点是操作过程比较复杂。
(4)误差分析数据仅能体现模型与点云的误差,无法表达出模型与实物的误差,需要人为测量、判断。