转移概率部分未知的正Markov切换系统的故障检测*
2021-10-25王玉杰郭成成齐文海赵明君张瑞雪周国金
王玉杰, 郭成成, 齐文海, 赵明君, 张瑞雪, 周国金, 尹 旭
(曲阜师范大学工学院,276826,山东省日照市)
0 引 言
正系统的特点是:如果对于任意的初始条件和外部输入是非负的,那么系统的状态变量和输出轨迹同样保持非负[1]. 这一类特殊的系统在生态学、网络通讯系统、市场经济学、化学工业、环境科学以及病毒变异系统等领域有着非常广泛的应用,引起了越来越多的不同学科领域专家们的研究兴趣,从而推动了正系统理论的快速发展[2-5].
实际运行过程中的物理系统大多会受到随机参数的影响从而导致系统结构发生突然变化,这些变化可能来自于突发因素,例如工作环境的突然变化、子系统间跳变、工作点的变化以及零部件故障等各种复杂的因素. 此时,上述系统模型难以用传统的系统精确刻画,可以用Markov切换系统模型来表征[6,7]. 近年来,结合正系统理论,人们对Markov切换系统进行了大量的研究,并取得了丰硕的成果[8-11]. 众所周知,转移概率影响着Markov切换系统的动态特性,决定了系统模态之间的切换. 然而,在实际系统中,由于测量条件的限制,转移概率通常是部分未知的,获取完全的转移概率是很困难的,往往需要花费很大的经济代价. 一个典型的例程是网络化控制系统,其中包丢和信道延迟可以描述为Markov过程[12]. 在网络化控制系统的不同运行阶段,丢包以及时延的变化可能呈现出随机特性,导致转移概率矩阵中的全部元素很难获得或者代价很高.
另一方面,在科技和经济高速发展的今天,人们对工业生产以及航天工程等领域中的系统安全提出了更高的要求,使得故障检测技术得到了迅速发展,从而涌现出了众多的故障检测方法[13]. 其中故障检测滤波器是最常用的方法之一,主要思想是基于滤波器产生一个残差信号,并通过比较残差信号和预定阈值来确定残差评估函数,最终判断故障是否发生[14]. 近年来,考虑Markov切换过程,相关的故障检测研究已有部分文献报道[15-18].
然而,Markov切换系统的故障检测研究多数没有考虑正性的要求[15-17]. 有关正Markov切换系统故障检测方面的文献却很少. 文献[18]基于事件触发机制,研究了正Markov切换系统的故障检测问题,其中转移概率是完全已知的,给故障检测滤波器的设计带了一定的保守性.
本文针对转移概率部分未知的正Markov切换系统的故障检测问题. 考虑系统的状态不可获知,基于线性Lyapunov函数,设计了正故障检测滤波器,保证了系统正性、随机稳定性和L1增益性能的要求. 与线性矩阵不等式的求解方式不同,文中采用线性规划的方式实现了正故障检测滤波器的求解.
1 系统描述
考虑如下正Markov切换系统
(1)
其中x(t)∈n,d(t)∈l,f(t)∈r和y(t)∈p是系统的状态、扰动、故障和测量输出;x0,g0,t0分别为初始状态、初始模态和初始时间;{gt,t≥0}表示Markov切换过程,取值集合为S={1,2,…,N}. 转移概率表示如下



为了方便起见,当gt=α时,分别用Aα,Bfα,Bdα,Cα,Dfα和Ddα表示系数矩阵.
定义1[18]如果对于x0≥0,d(t)≥0以及f(t)≥0,使得x(t)≥0和输出y(t)≥0,则系统(1)是正的.
引理1[18]当且仅当Aα是Metzler矩阵,Bfα≥0,Bdα≥0,Cα≥0,Dfα≥0,Ddα≥0,对于∀i∈S,系统(1)是正的.
对于正Markov切换系统(1),构造如下同步故障检测滤波器
(2)
其中xF(t)和rF(t)分别为滤波器的状态和输出;AFα,BFα,CFα和DFα为系数矩阵.
从引理1,可以得出故障检测滤波器(2)是正的当且仅当Afα是Metzler矩阵,BFα≥0,CFα≥0,DFα≥0.

(3)
其中


则系统(3)(w(t)=0)是随机稳定性的.
定义3[9]对于γ>0,如果满足
(a)当w(t)=0时,系统(3)是随机稳定的;
(b)在零初始条件下,
则系统(3)是随机稳定的并且满足L1增益性能.
此时,故障检测滤波器设计问题被转化为L1滤波设计问题. 为正Markov切换系统(1)设计故障检测滤波器(2),使得闭环系统(3)是随机稳定的. 进一步,在零初始条件下,达到满足下式γ下确界小的可行性解
其中γ>0.
下一步,选择阈值和残差评估函数,其中残差评估函数构造为

(5)
其中T为评价时间窗口.
故障信号可以通过以下关系确定,Jr(T)>Jth⟹发生故障⟹警报,Jr(T)≤Jth⟹正常.
2 主要结论
本节将主要研究随机稳定性、L1增益分析以及正故障检测滤波器设计问题.
2.1 随机稳定性分析

(6)
(7)
(8)
那么系统(3)(w(t)=0)是随机稳定的.
证明对于系统(3)(w(t)=0),选择线性余正型Lyapunov函数

(9)
根据弱无穷小算子定义[7],可以得到



(10)

应用Dynkin’s定理可得

进一步,


注1 对于转移概率矩阵的未知部分,在定理1的证明过程中,采用自由权向量方法降低了参数求解的保守性.
2.2L1增益性能分析
接下来,将考虑系统(3)的L1增益分析问题.
(11)

(12)
那么系统(3)是随机稳定性的并且满足L1增益性能指标.
证明由不等式(11)可以得出不等式(6). 基于定理1,系统(3)(w(t)=0)随机稳定. 构造Lyapunov函数(9),可得

如果不等式(7)~(8)和(11)~(12)成立,得到

2.3 故障检测滤波器设计
基于定理2中的L1增益性能分析结果,可以得到故障检测滤波器(2)的参数求解方式.
定理3 定义
Aα=[Aα1,Aε2,…,Aαn]T,Bdα=[Bdα1,Bdα2,…,Bdαn]T,Bfα=[Bfα1,Bfα2,…,Bfαn]T,
Cα=[Cα1,Cα2,…,Cαq]T,Ddα=[Ddα1,Ddα2,…,Ddαq]T,Dαi=[Dfα1,Dfα2,…,Dfαq]T,

(13)
(14)
(15)
(16)
(17)
(18)
(19)
αaαs+εαses≥0,
(20)
其中εα=[εα1,εα2,…,εαn]T,q2α=[q2α1,q2α2,…,q2αn]T,那么系统(3)是正的、随机稳定性的并且满足L1增益性能. 进一步,故障检测滤波器的求解参数为
CFα=[cα1,cα2,…,cαq]T,DFα=[dα1,dα2,…,dαq]T.
(21)
证明由(20)式,根据引理2可得Afα是Metzler矩阵. 由(21)式可得出BFα≥0,CFα≥0,DFα≥0.因此,故障检测滤波器(2)是正的.
由(19)式可得
Aα-AFα-BFαCα≥0,Bdα-BFαDdα≥0,Bfα-BFαDfα≥0,Cα-CFα-DFαCα≥0,
Ddα-DFαDdα≥0,Dfα-DFαDfα≥0.

3 数值仿真
考虑下列二模态的随机Markov切换系统
对于γ=0.1,求解不等式(13)~(20),得到
图1描述系统模态,图2描述故障信号.由图3和图4可知,随着时间的变化,系统状态x(t)和xF(t)保持在第一象限并且趋向大体一致,即系统的估计误差渐近趋近于0.这意味着系统(3)是正的、随机稳定性的并且满足L1增益性能.
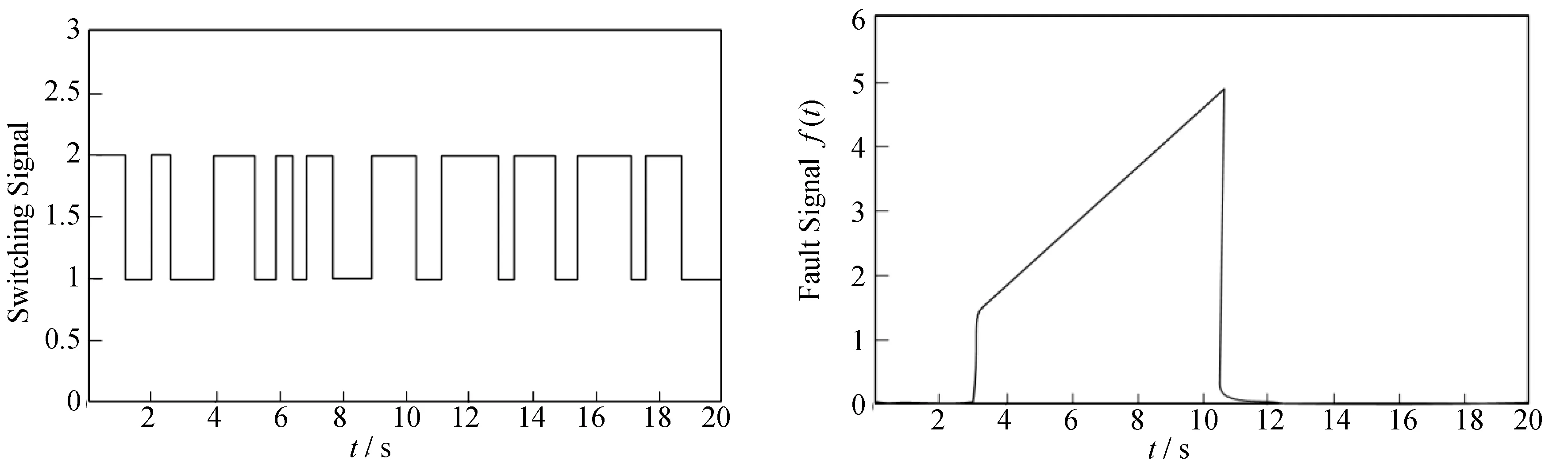
图1 系统模态 图2 故障信号
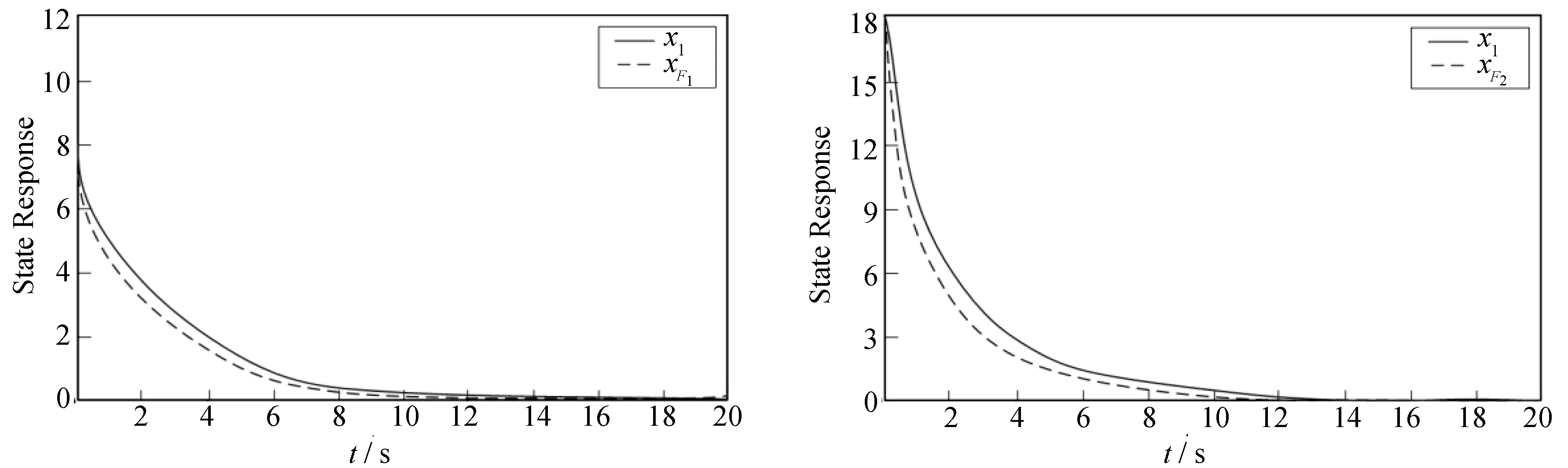
图3 状态轨迹x1(t)和xF1(t) 图4 状态轨迹x2(t)和xF2(t)
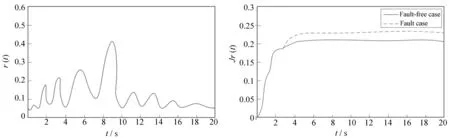
图5 残差响应曲线图 图6 残差评价函数曲线
4 总 结
本文研究了转移概率部分未知的正Markov切换系统的故障检测问题. 基于线性余正Lyapunov函数,得到闭环系统L1有界的充分条件. 进一步,确定故障检测滤波器的线性规划求解方法. 然后,利用残差评估机制判断系统是否发生故障. 理论证明,故障检测滤波器使得闭环系统满足正性、随机稳定性以及L1增益性能指标. 数值仿真表明,设计滤波器在系统发生故障后可以快速检测出故障.
