航海模拟器中的港口精准流场的数值模拟
2021-10-25苏鹏华尹勇蔡松
苏鹏华,尹勇,蔡松
(大连海事大学 航海学院,辽宁 大连 116026)
大型船舶进出港受航行外环境限制采取低速航行时,易受流的影响发生碰撞或驶出航道边界线[1],操纵人员需熟悉航道流场环境。目前操纵训练较多在船舶操纵模拟器中进行[2],模拟器中港湾的流场较多采用定向定速的实测值,不能体现港湾水流的不定常性和不均匀性。
国内外应用较为广泛的海洋数值计算模型为POM模型[3]和FVCOM模型[4],其中FVCOM模型更适用于浅海、河口和港湾的流场的计算[5]。二维流场能够满足传统航海模拟器对视景仿真[6]的需求,也可用于均匀流体对船体作用计算。模拟器中船舶数学模型需解析船舶在非均匀流场中的受力,二维流场在垂直方向上不能满足计算要求。为此,考虑选择更适合港口环境的FVCOM模式,水平方向上加密局部重要区域,在垂向上采用σ坐标变换进行分层,计算湛江湾的精准三维动态流场。将计算结果应用于Dragon V5000型航海模拟器,使模拟器中湛江湾流场更为真实。
1 模型构建
1.1 模型方程
FVCOM[5]模型具有边界容易拟合、可进行局部加密、离散计算方程组的特点。港口区域地形、流场相对复杂,使用此模型可较好地进行计算区域和边界条件的拟合,也可针对复杂区域进行局部加密。
为了拟合不规则变化的地形情况,在垂向上采用σ坐标变换。
(1)
式中:σ的值为-1~0,-1表示海底,0表示海面;D=H+ζ为瞬时总水深。
1.2 模型参数
模型的计算区域为湛江湾(110°20′21.251 43″E,21°2′23.287 92″N,110°34′0.694 18″E,21°11′17.223 46″N),模型所用地形与水深数据来自电子海图图幅CN488102.000、CN512314.000,数据的可信度较高。数学模型采用无结构三角形网格对水平空间进行离散,并对港区、航道、码头以及水深变化剧烈的区域进行局部加密。计算区域内最小网格步长50 m,最大网格步长679 m。开边界为远离湛江湾入口的一条弧线,可以减小对于湛江湾内关心区域的强烈影响。模型在垂向采用σ坐标,均匀分10层。数值计算网格见图1。

图1 计算区域以及生成的网格
经过多次数值实验,得到适合本模型的底摩擦系数,取值为0.002 5。为了更好模拟湛江湾水域的水动力特征,采用大小模型嵌套的方式,大模型为中国东海大区潮模型,小模型为FVCOM模型。FVCOM模型开边界条件由中国东海大区潮模型嵌套提供,中国海大区模式计算的逐时水位驱动小区模型。
为减少计算模拟的时间,采用内外模态交替的计算方法。模型时间步长设定为:外模时间步长10 s,内模时间步长2 s,满足模型收敛条件。时间步长设定满足CFL条件。
(2)
式中:ΔtE为时间步长;ΔL为网格三角形中最短的边长;U为水平方向最大的速度;D为网格三角形中心水深。
2 模型验证与结果分析
利用2019年12月中旬实测大、小潮潮位和流速、流向资料对模型进行验证。其中:潮位验证采用湛江潮位站(21°10′N,110°24′E)大潮(12月14日00∶00-12月15日00∶00)和小潮(12月19日00∶00—20日00∶00)资料;流速流向验证包括三条固定垂线(P1~P3)特征点验证。潮位站和观测点见图 2。
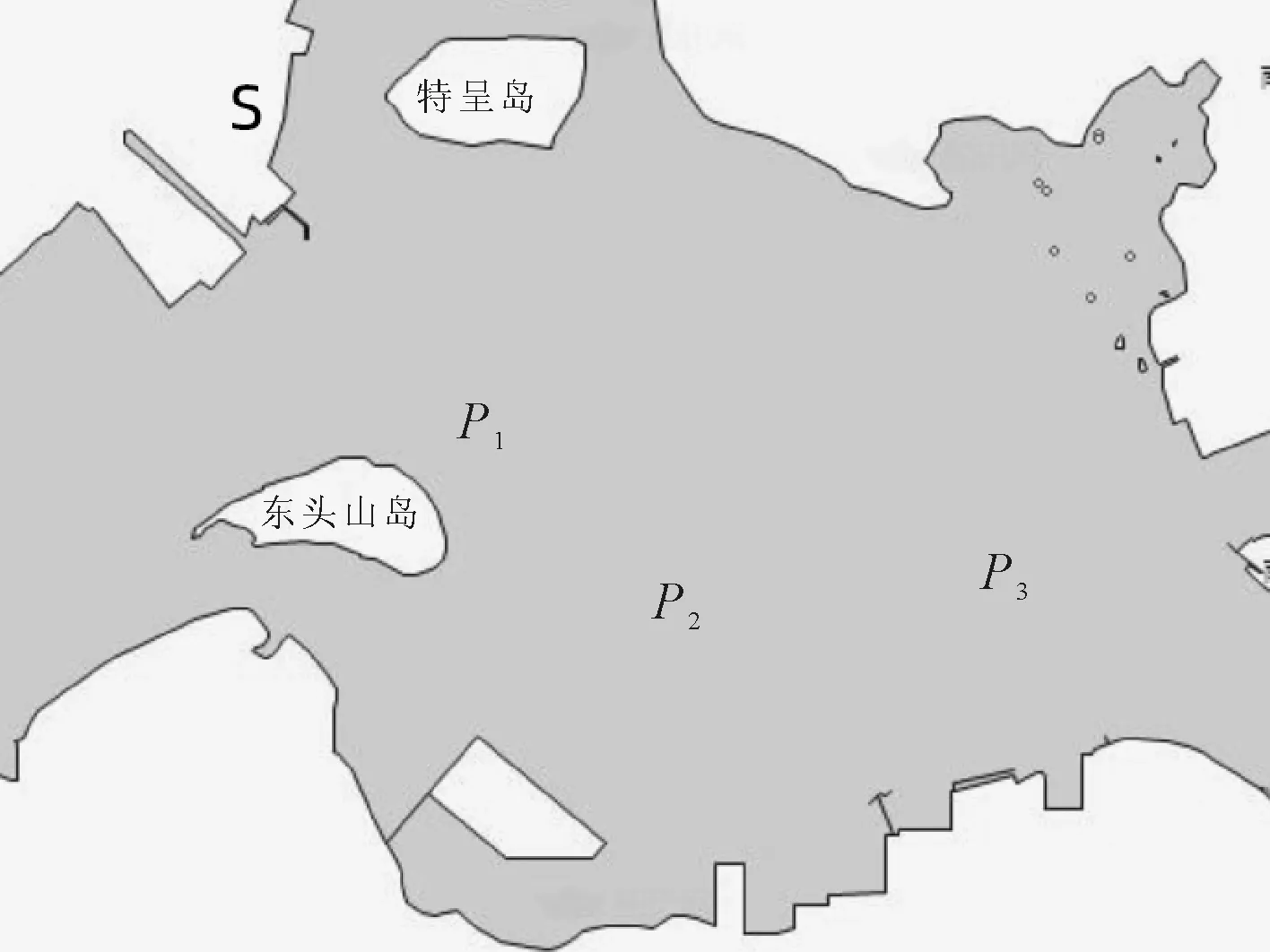
图2 潮位站(S)和观测点(P1~P3)
大、小潮潮位验证见图3,使用目前海岸模型中应用最为广泛的量化指标均方根误差(RMSE)和Skill参数[8]。RMSE度量模型所预测值与真实值之间的平均差值,其值越接近0,模型的质量越好。Skill度量模拟值和观测值的相关性,其取值值越接近1,表明拟合程度越好。
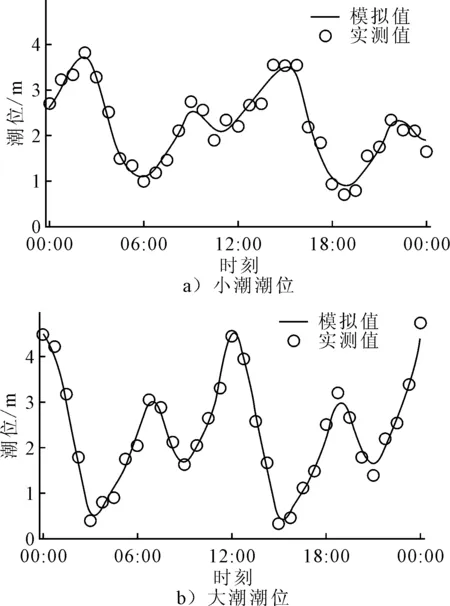
图3 2019年12月19日潮位模拟值与实测值对比
(3)
(4)
潮位验证结果表明,所用模型计算的潮位与实测潮位吻合较好好。整体上潮位误差在12 cm以内,相位误差在20 min以内,符合规范要求。
大潮期间,模型的RMSE为0.014 1,Skill值为0.990 2;小潮期间,模型的RMSE为0.011 6,Skill值为0.995 6。可以看出,模拟值与实测值吻合较好,且小潮的的吻合度高度大潮。
3个观测点流速、流向验证见图4、5。

图4 3个观测点流速验证(2019年12月19日)

图5 3个观测点流向验证(2019年12月19日)
从潮流过程线看出,由模型计算的流速和流向与实测数据在垂向表层和中层(约一半水深处)吻合度好,垂向流速由上层至中层的变化趋势与实测趋势一致。总体的涨落潮流速、流向以及转流时间均与实测数据吻合度良好。
因此,模型总体上可以表现实际海域水动力场特征。
3 流场数据在航海模拟器中的应用与分析
3.1 流场数据的应用
使用航海模拟器电子海图系统中的CurrentConvert模块对计算结果进行处理,形成配置文件CurrentDisplay.ini和CurrentField.ini。模拟器通过配置文件CurrentDisplay.ini调用CurrentField.ini中的数据进行流场显示以及水动力计算。
通过上述模型计算了2019年12月11日00∶00—20日23∶59湛江港潮流场,选取模型稳定运行阶段的计算结果,经过数据处理后集成到航海模拟器中。航海模拟器电子海图中显示的流矢量见图6。
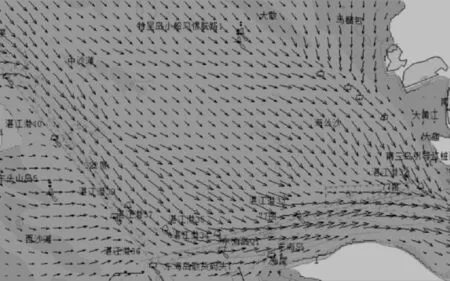
图6 电子海图中的流矢量图
3.2 模拟实验
3.2.1 试验方案
船舶在进出港航道航行时,船速通常较低,风、流等环境干扰力对船舶运动的影响显著[9]。为突出流场对船舶运动的影响,设计实验过程无人员操纵,使给定初始航速的船舶能够安全航行。由训练记录提取船舶的在实验中的运动数据,进行处理和分析。
初始位置、初始航向,以及计划航线设置见图7。实验设置起点为湛江港32号灯浮南面(21°5.067 1′N ,110°30.444 1′E),初始航向设置为142.3°;主机转速设置为20%,以保证船舶可到达石头角航道;实验过程不进行操舵。

图7 初始船位、初始航向
3.2.2 基本参数设置
1)船舶设置。为突出流场作用效果,测试使用中型船舶。选用船模为集装箱船Yinhe,见图8。船模具体参数:船长168 m,型宽28 m,型深24.9 m,设计吃水9.5 m,排水量28 849 t。
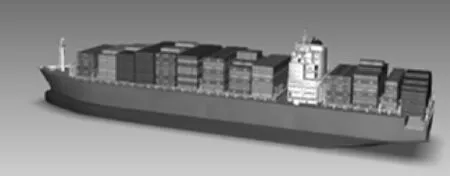
图8 船模
2)环境设置。实时动态流场设置为12月15日11∶30—12∶30的模拟结果,此时为潮涨阶段;流场数据来自海图图幅CN512314.000。风、浪定量:3级风,风向为275°;波高为0.5 m;潮汐采用2019年9月15日湛江港潮汐信息,见表1。

表1 湛江港潮汐表
3.2.3 实验结果及分析
严格按照试验方案、船模和环境设置,进行动态流场与模拟器自带定向流场对船舶航行影响试验。进行多组实验,并对一组典型的训练结果进行数据提取和分析。
不同流场中航速的变化见图9。

图9 不同流场中航速的变化
从图9可见:三维动态流场和模拟器自带定向流场对船舶航速影响差异明显:整个航行过程中,动态流场中的航速均大于定向流场中的航速,动态流场中的航速变化趋势随时间发生变化;定向流场对航速的作用效果比较单一,不能很好地体现出特定区域的流场动态作用特点。
不同流场中转艏角速度的变化见图10。

图10 不同流场中转艏角速度的变化
从图10可见:三维动态流场和模拟器自带的定向流场对船舶转艏的作用差异较大:动态流场较好地体现了真实流场对船舶转艏的作用,起点处流场受狭窄湾口的影响,水流由湾口由外向湾内扩散,方向约265°,使船舶产生较大的右转艏角速度。船舶行驶3 min后,流向接近航道方向约143°,转艏角速度逐渐减小。6 min后,流向接近270°并逐渐增大到305°,转艏角速度再次逐渐增大。与此相比,定向流场未能较好的体现出真实流场的作用效果。
船舶在精准动态流场中的航迹见图11。

图11 精准动态流场中的航迹图
对比分析发现,航海模拟器中定向流场和三动态流场对船舶航速和转向的影响有较大差别。三维动态流场更接近真实环境的流场,使模拟器中流场对船舶速度、转向的影响更贴近真实的情况。因此,操船者在模拟器进行模拟操纵时,可以得到更为真实的流场作用感受,可以进一步提升操纵者的训练效果;在航海模拟器中进行通航安全评估时,可以更好地评测流对航行安全的影响,进一步提升评估的可信度。
4 结论
基于FVCOM模式可计算港口的三维动态流场,计算结果可应用于Dragon V5000型航海模拟器并进行船舶运动解算。不同分层水体流动特征不同,三维水动力模型更能体现这种区别,更适于非均匀流对船体作用力计算。三维动态流场的应用可提升航海模拟器的环境真实感和行为真实感,有利于提升航海模拟器的性能和应用效果。
