三维激光扫描技术在异形建筑竣工测绘中的应用
2021-10-24许飞
许飞
(德州市自然资源局,山东 德州 253000)
1 引言
近年来,我国出现了大量异形建筑,异形建筑具有外观独特、空间大、跨度宽等特点,传统测绘手段已不能满足其竣工测绘的需求。三维激光扫描技术是于上世纪90 年代中期发展成熟的一项高新技术,无需接触测量目标就可快速、全自动、高精度获取物体表面的密集点云数据,后期结合相关软件不仅能快速复建物体的三维模型,还能进一步提取物体的二维平面信息,因此又被称作“实景复制技术”[1]。当前,随着三维激光扫描技术软硬件价格的不断下探,该技术已被越来越多地应用于各种工程测量中,本文就三维激光扫描技术在异形建筑竣工测绘中的应用进行探讨。
2 三维激光扫描技术简介
2.1 技术原理
三维激光扫描技术原理和免棱镜全站仪系统类似,即通过激光发射器周期地驱动二极管脉冲信号到达被测物体,回波信号经漫反射返回被接收器接收,计时器同步记录发射时刻和返回时刻,控制编码器同步测量激光脉冲水平角和垂直角,仪器自带的微电脑计算扫描点到仪器中心的斜距,进而按极坐标法即可求出被测物体表面扫描点的三维坐标。不同的是,免棱镜全站仪是单点作业,而三维激光扫描仪可实现对目标全方位立体扫描,将扫描获取的密集点称作点云[2]。
三维激光扫描技术通常采用的都是内部坐标系统,采集到的点云数据以扫描坐标系为基准,扫描坐标系的定义为:以发射激光束处为该坐标系原点,X 轴为扫描仪水平转动轴的零方向,Z 轴为扫描仪水平时的天顶方向(理论竖直轴),Y 轴与X 轴、Z 轴成右手坐标关系,三维激光扫描技术测量原理如图1所示。
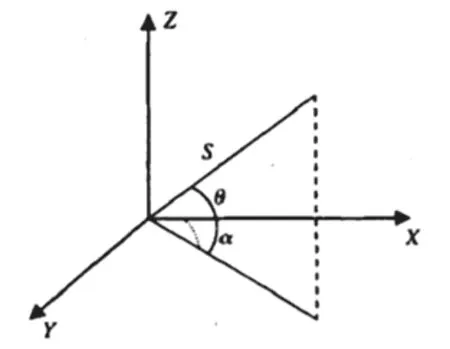
图1 三维激光扫描技术测量原理
图1 中,S 为坐标原点到被测目标点的距离,α 为扫描仪激光脉冲水平角,θ 为扫描仪激光脉冲竖直角,那么就可以用公式(1)来表示目标点在扫描坐标系中的x、y、z 三维坐标:

2.2 误差分析
三维激光扫描系统作业时,影响扫描精度的误差源于多方面,主要包括距离和角度误差、坐标拼接误差两部分,测量误差传播的基本规律同样适用该系统。(1)距离和角度误差
根据三维激光扫描技术测量原理公式(1)可知,激光点的坐标由3 个变量构成,即距离S、扫描仪激光脉冲水平角α 和竖直角θ,根据误差传播定律,扫描到的激光点的误差也是由这3 个变量引起的。
(2)点云拼接误差
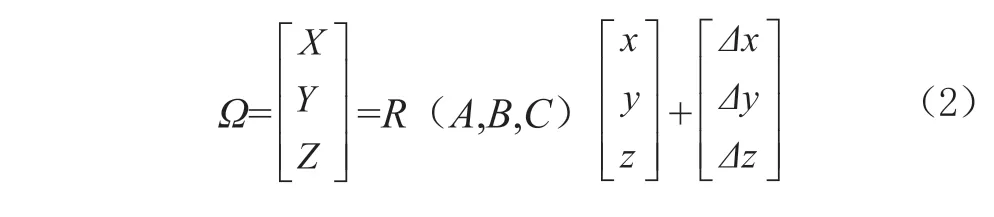
当测量一个目标需要设立N 个测站时,必须要把N 个测站扫描到的面状“点云”拼接起来,即通过标靶点的坐标与点云坐标进行匹配来实现多个面状“点云”的拼接,在此过程中会产生拼接误差,拼接误差由全站仪与三维激光扫描仪共同产生,若点云坐标向量与坐标轴的交角分别为A、B、C,平移参数分别为Δx、Δy、Δz,则有公式(2)的拼接误差模型Ω:
3 应用实例
3.1 项目概况
某国际会展中心集五星级酒店、商业写字楼于一体,外形独特时尚,塔楼设计采用几何式立面结构,宛如随意凌乱叠放的方块,层层纵横交错,属于典型的异形建筑。考虑到采用传统方法进行竣工测绘非常困难,项目组应用三维激光扫描技术对其进行竣工验收测量。
3.2 外业数据采集
(1)控制测量
依据扫描目的和精度要求,结合异形建筑周边环境,项目组决定采用闭合导线多站扫描的方案,扫描站点分布在建筑物周边,各站点两两通视并保证扫描仪能扫描到建筑物的所有表面,站点坐标由SDCORS 网络RTK 测量得出。扫描控制网布设如图2 所示。
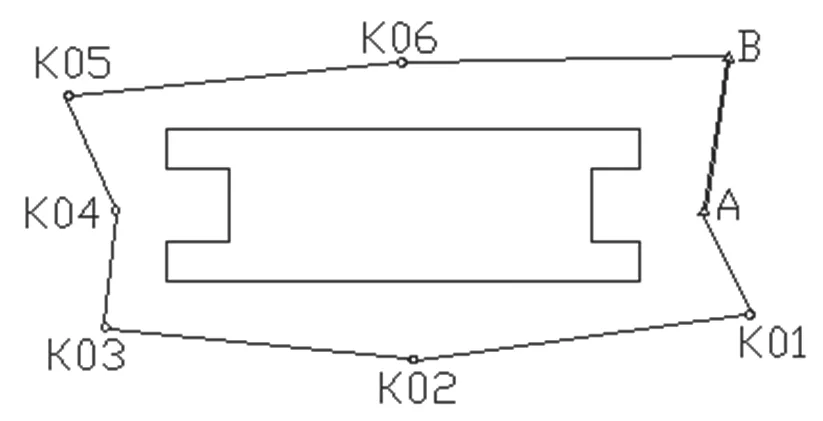
图2 扫描控制网布设
(2)点云数据采集
点云数据采集采用Leica ScanStation C10 扫描仪,采集流程如图3 所示。

图3 点云数据采集流程
3.3 点云数据处理
将采集到的点云数据导入和仪器配套的Cyclone软件中,点云数据处理主要有点云拼接、点云去噪、点云统一三个步骤。
(1)点云拼接
为保证建筑物表面点云配准精度,采用序列拼接方法,即从第一站开始,先利用前站球形标靶进行初配准,再利用相互重叠的点云进行ICP 配准。按照此方法将8 站所有点云数据拼接完成,经检测首尾重叠处的点云相差小于6mm,满足相关规范的精度要求。
(2)点云去噪
利用Cyclone 软件手动去除点云中含有粗差的数据和无效的形体数据,这一过程属于去噪处理,在Cyclone 软件中打开拼接完成后的8 站点云总图,通过旋转、放大操作将点云调整到理想位置,根据需要在工具栏中选择合适的工具去除噪声点。
(3)点云统一
相邻两站的点云数据在去噪以后存在大量冗余,造成数据量增大、采样间隔不一致的状况,因此需要对点云数据进行重采样,具体过程就是在保证质量的前提下,再次利用Cyclone 软件对点云进行统一化处理,同时将多站点云进行压缩并合并成一个整体。
3.4 三维建模
为准确建立建筑物的三维实体模型,反映该建筑的现状,借助Geomagic Studio 软件进行三维建模,主要构建过程分为点阶段、多边形阶段和曲面阶段,该国际会展中心的外观图和局部三维模型如图4所示。

图4 异形建筑外观和局部三维模型
(1)点阶段
点阶段是对扫描的海量点云数据进行精细化处理,具体包括:点云坐标摆正、去除噪声点、点云的重采样和封装、点云的导入和着色等,此阶段主要是为后续建模打好基础。
(2)多边形阶段
此阶段包括多边形的简化、多边形表面的光滑化处理、多边形孔洞和缺口的修补等,由于该阶段会关系到模型曲面生成的质量,因此处理工作必须认真细致,最终得到形状完整、光滑的多边形模型。
(3)曲面阶段
曲面阶段是为了减少模型空间三角面片之间的棱角,使得多边形模型表面更加光滑逼真。该阶段主要利用曲面片拟合的方法,经混合、过渡、连接三个过程创建成曲面模型来实现。
3.5 精度验证
为验证本次三维激光扫描成果的质量,在该异形建筑物上选取10 个特征点,分别用徕卡TCR402 免棱镜全站仪测量出所有特征点坐标,将其结果与在三维模型中量取的坐标值进行比较,统计结果如表1 所示。
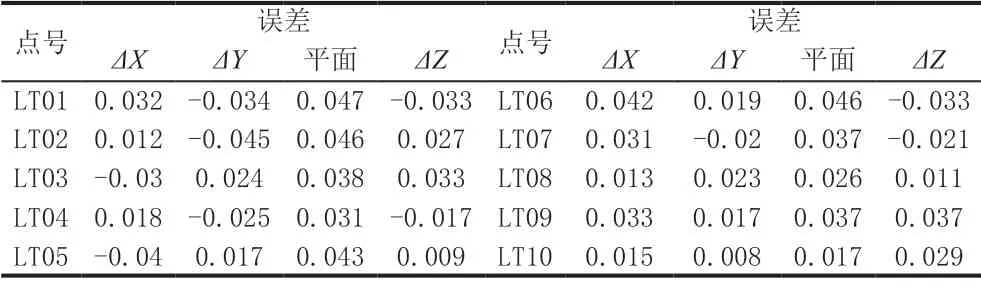
表1 异形建筑三维模型精度统计表(单位:m)
从表1 统计数据看出,10 个特征点的平面位置最大误差为0.047m,高程最大误差为0.037m,满足《城市建设工程竣工测量成果规范》(CH/T 6001-2014)关于建筑物检测点点位中误差不大于50mm、高程中误差不大于40mm 的精度要求。
3.6 竣工测量专题图绘制
根据建筑物竣工验收要求,绘制建筑物竣工测量专题图是一项重要工作,项目组利用Cyclone 软件的创建参考面功能截取建筑物截面和立面点云数据,再利用CAD 软件即可轻松实现竣工专题图的绘制。将绘制的竣工图与设计图进行对比分析,就可以准确地对竣工建筑物进行验收。
4 结束语
利用三维激光扫描技术成功完成了某异形建筑的竣工测绘工作,该种作业方式具有高效快捷等特点,经验证,其测量精度能够满足相关规范的要求,该技术应用于复杂、不规则的异形建筑竣工测绘中具有无可比拟的优势。应用发现:利用三维激光扫描技术难以获取异形建筑物顶部的数据,而且其遇到扫描对象为玻璃幕墙等反射率较低的建筑材料时,点云数据的质量不是非常理想[3],相信随着仪器的不断升级以及相关软件功能的不断完善,以上问题都会得到解决,三维激光扫描技术在测绘领域具有广阔的应用前景。
