基于DNN的舵机用永磁式线性力电机驱动力预测模型*
2021-10-23王子旋黎向锋张宇翔胡嘉琨徐礼林左敦稳
王子旋, 黎向锋, 张宇翔, 胡嘉琨, 徐礼林, 左敦稳
(1.南京航空航天大学 机电学院,江苏 南京 210016;2.南京机电液压工程研究中心,江苏 南京 211106;3.航空机电系统综合航空科技重点实验室,江苏 南京 211106)
0 引 言
传统电液舵机采用喷挡伺服阀驱动主控阀,分配流量控制下游的作动筒,喷挡伺服阀的工作特性决定了该类舵机不可避免地存在内漏大、抗污染能力差等不足[1]。随着永磁材料和数字伺服控制技术的发展,直驱式电液伺服阀逐渐发展成熟。在马达和滑阀之间没有喷嘴挡板的液压放大器,而是采用直线电机直接驱动阀芯运动[2]。因此具有结构简单、装配调试方便、静动态性能好、内漏小及抗污染能力强等优点。目前F-22、B-2、EFA-2000、JAS39等机型均应用了这一技术,国内军机也正逐步采用此技术[1]。
在舵机产品的制造与装配使用过程中,零星金属碎片会随流体在产品中流动,如果在主控阀关闭过程中阀口被碎片挡住,阀芯不能回中,则会导致产品工作失效。如果考虑对可能进入阀口的金属碎片进行切割,阀芯和阀套是一种很有效的切削工具[1]。永磁式线性力电机通过比较输入指令的极性和阀位移极性,使其具备故障检测能力。若2次以上重复出现故障指示,系统会短时施加一个较大反向剪切电流,对可能进入阀口的金属碎片进行切割,使阀芯能够回中,从而具备恢复能力。因此,在电机结构设计中需要调整电机结构参数使电机具有足够大的碎片剪切力。电机分析方法主要包括磁路法、解析法和有限元法。当涉及电机复杂几何结构、严重的磁饱和情况,有限元法比磁路法和解析法有更大的优势[3]。
传统预测模型能够针对少数样本数据拟合目标值与输入变量的数学关系,在很大程度上减少有限元仿真次数,适合于有限元仿真和计算流体动力学仿真等高计算成本的应用场合[4-6]。其主要包括Kriging模型、响应曲面设计方法(RSM)、径向基函数(RBF)、支持向量机(SVM)、最近邻居法(KNN)等[7]。文献[3]针对磁通切换永磁直线电机,使用Kriging模型建立了有效的电机推力预测模型。文献[8]针对双侧线性游标永磁电机,利用RSM建立了永磁体宽度等电机结构参数与电机功率因素、平均推力及推力波动的映射关系。文献[9]针对永磁同步电机采用RBF建立了电机速度预测模型。文献[10]研究了用于微秒激光切割机的永磁同步直线电机,通过SVM建立了电机结构参数(永磁体高度、空气间隙等)与电机平均推力、推力波动和谐波失真率之间的映射关系。文献[11]针对双层反向倾斜线圈的永磁同步直线电机,使用KNN建立了电机高精度快速计算模型。
深度神经网络(DNN)是由多层自适应的非线性单元组成,通过逐层学习不断减小模型预测误差,现已在语音声学[12]、轴承故障诊断[13]和船舶检测[14]等回归建模中证明了有效性。文献[15]针对双次级直线电机,使用基于ReLU激活函数的DNN模型建立了电机结构与电机推力和推力波动的映射关系。在拥有大量样本的情况下,可通过DNN中多隐藏层的逐层参数学习来有效提高模型的预测精度[16]。本文综合使用有限元磁场仿真和DNN建立永磁式线性力电机驱动力的预测模型。
1 舵机用永磁式线性力电机原理
1.1 舵机用永磁式线性力电机结构
舵机用永磁式线性力电机主要由端盖、轴承、轴、衔铁、外套等部件及密封圈、螺母、螺钉等标准件组成,如图1所示,其中衔铁是其核心零件,以此构成完整的电磁回路。如部件7,环形磁钢共有2块,对称分布在左右两侧;线圈环绕在线圈骨架之上。
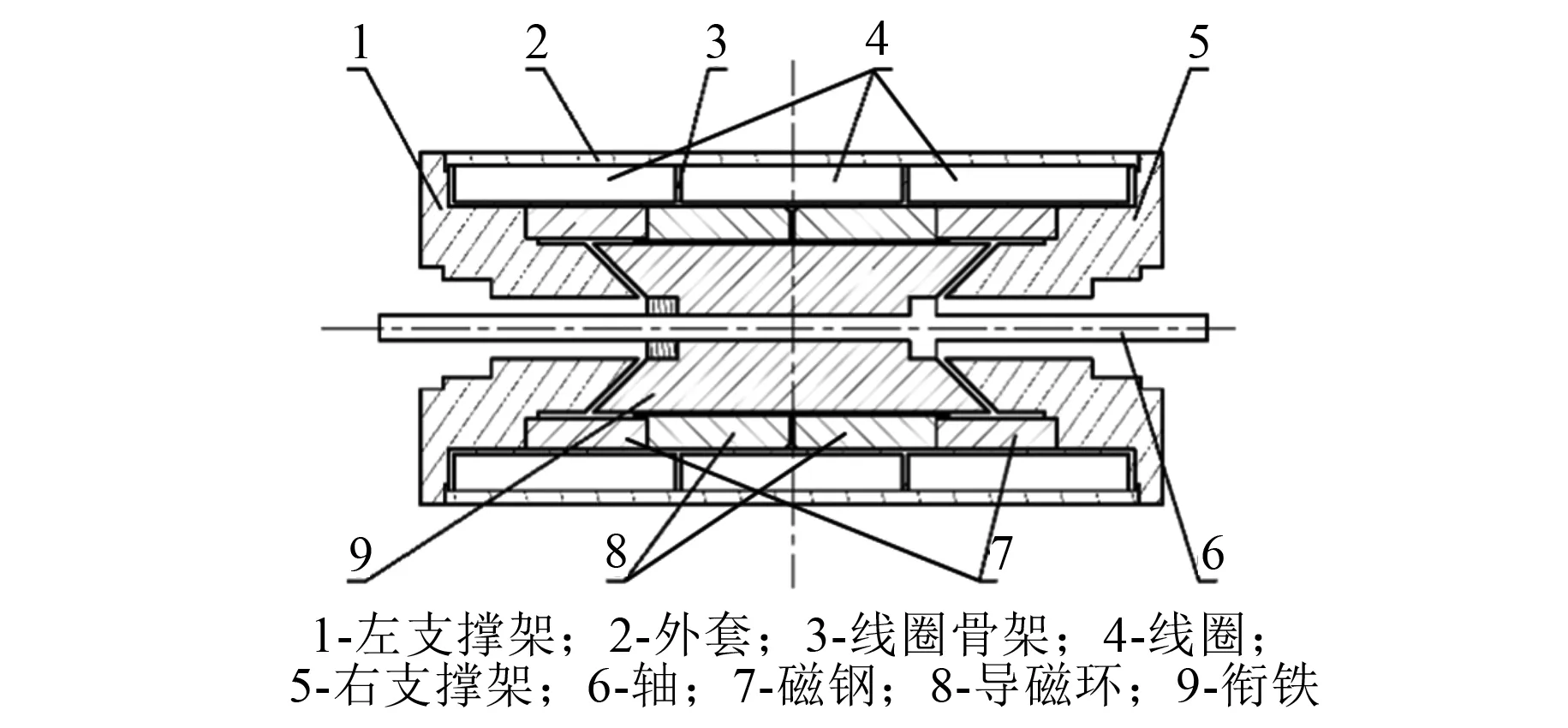
图1 舵机用永磁式线性力电机简化结构
1.2 永磁式线性力电机驱动力
该永磁式线性力电机的驱动力主要由气隙磁场产生,而气隙磁场由2部分产生:(1)由永磁体建立,是气隙磁场的主要部分;(2)由辅助励磁绕组的电流来激励产生,起调节磁场的作用。此外,永磁式线性力电机结构中的支撑弹簧具有失效对中功能,在切断系统输入电流时,其回中力刚度能够克服滑阀摩擦力,从而使阀芯回到中位。输入电流为0时,衔铁处于中位,此时左、右工作气隙相等,永磁体的磁势在工作气隙处产生固定磁通且大小相等,且弹簧力为0,故驱动力为0。图2所示的衔铁偏离中位向左,则弹簧力和固定磁通力的合力向右。如果此时衔铁受力自平衡,即对外的驱动力为0,需要通电流提供向左的电磁力,继续加大此方向电流,电机就能提供向左的驱动力。反之减小甚至改为反向电流,则电机就能提供向右的驱动力[1]。

图2 电机驱动力组成示意[1]
在电机实现碎片剪切功能时,其电磁综合力(即电磁力与固定磁通力的合力)与弹簧力不再平衡,此时衔铁仅受回中方向的弹簧力以及瞬时改变方向的电磁综合力,此电磁综合力和弹簧力的合力即为碎片剪切力。在进行电磁场有限元仿真和设计时,弹簧力并不是影响因素。并且为了便于测试验收,0位时的电磁综合力与极限位置的电磁综合力也存在着一定的内联关系。故本文使用0位时的电磁综合力来替代碎片剪切力。由于0位时电机驱动力中的弹簧力为0,故此位置的电磁综合力即为电机驱动力。
2 永磁式线性力电机驱动力预测模型建立流程
永磁式线性力电机驱动力预测模型建立流程如图3所示。该预测模型建立流程主要包括电机结构参数确定、样本库建立、DNN模型搭建及精度检验。其中永磁式线性力电机结构参数确定包括:ANSOFT有限元电磁场仿真模型建立以获得其驱动力,并明确其优化目标(足够大的电机驱动力)和约束条件(电机外径尺寸恒定),选取关键的电机结构参数(气隙轴向间距、衔铁厚度、气隙角度、磁钢及导磁环厚度);样本库建立是指采用拉丁超立方采样方法和最大最小距离准则,通过ANSOFT仿真得到1 000组采样数据,作为训练集和测试集用于下一步DNN的训练和精度检验;DNN模型搭建包括转换层关键点的确定、损失函数及激活函数的确定及批标准化算法;精度检验部分是将DNN与传统预测模型RBF和Kriging进行比较,以检验DNN模型的准确性。
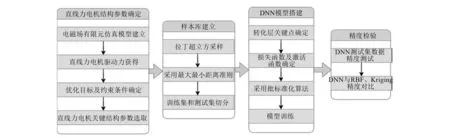
图3 永磁式线性力电机驱动力预测模型建立流程
3 永磁式线性力电机结构参数的确定
3.1 基于ANSOFT的永磁式线性力电机电磁场有限元仿真
研究永磁式线性力电机的结构参数(如气隙宽度等)对电机力性能影响时,通常使用ANSOFT Maxwell商用低频电磁场有限元软件进行电磁场的仿真[17]。依据电磁驱动装置的原理,将该永磁式线性力电机简化为二维轴对称图形。图4为0位时施加极限电流的磁感强度分布图,由图4可知左侧气隙磁感应强度大于右侧气隙。此外,由ANSOFT仿真结果还能获得衔铁所受合力,该合力即为0位极限电流的电磁综合力,也是电机驱动力。

图4 永磁式线性力电机磁感强度分布图
该仿真模型中材料主要分为3类:左右支撑架、外套、衔铁和导磁环等软磁材料;磁钢等永磁材料;线圈和骨架等铜类材料。软磁材料DT4A的B-H(磁化)曲线及永磁材料(剩磁和矫顽力)等参数由相关研究所提供。为了防止过大的求解区域造成计算成本增加,仿真中引入气球边界条件。
为了验证ANSOFT仿真的有效性,要测量电机0位极限电流下的电磁综合力,其测试装置结构简图如图5所示。利用拉压力传感器测量电磁综合力,利用激光传感器测量位移使电机衔铁处于0位,电机衔铁位置用螺纹机构调节。

图5 永磁式线性力电机电磁综合力测试示意与测试
相关研究所提供的3组试验数据。对比仿真模型结果和试验测试值之间误差在15%以内,如图6所示。分析后认为仿真值与试验值之间的误差一方面来源于电机的材料及热处理影响;另一方面来源于所用拉压力传感器精度不高带来的测量误差。

图6 仿真有效性对比
3.2 永磁式线性力电机关键结构参数的选取
本文中电机结构外径尺寸不变,电机轴向尺寸可微调,其微调是通过改变电机内各个零件(包括衔铁、左右支撑架、磁钢、导磁环及线圈骨架,如图1所示)的尺寸及位置等参数实现的。故永磁式线性力电机结构的关键结构参数[18]如图7所示,其中δ代表气隙轴向间距;R1代表衔铁厚度;α代表气隙角度;R2对应着衔铁厚度、磁钢及导磁环厚度及其间的缝隙高度之和。R1不变时,R2的变化能够代表磁钢及导磁环的厚度。永磁式线性力电机关键结构参数初始值及选取范围如表1所示。

图7 永磁式线性力电机结构的关键结构参数
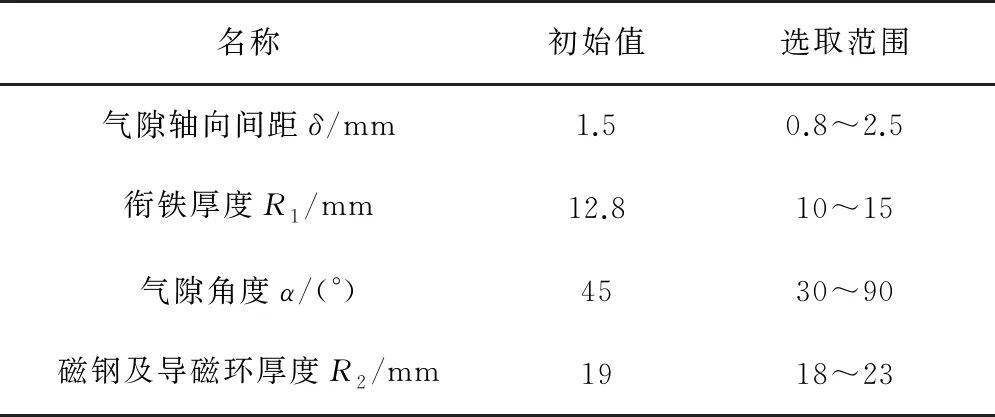
表1 永磁式线性力电机的关键结构参数
4 样本库建立
根据表1确定的关键结构参数,使用ANSOFT有限元仿真其电机驱动力,如果采用4因素5水平的变量就会有1 024种组合方式。考虑到获取代表性良好的抽样点是建立其预测模型的基础,为此应尽可能使抽样点均布于整体抽样空间。拉丁超立方采样[19]提供了一个非常有效而实用的小样本采样技术,已广泛应用于具有随机输入变量的复杂分析模型的统计和概率分析,是一种生成准随机采样分布的统计方法。假设输入数据为m维,需要采样n个样本,传统拉丁超立方采样步骤如下:
(1) 将每个维度均分为n个等分的取样空间;
(2) 在每个维度的n个小区间内分别随机取一个点;
(3) 依次从每个维度中随机抽取步骤2中选取的点,将这些点组成向量即为1个抽样样本。所有的点均随机组合完成后即可获得n个样本。
传统的拉丁超立方设计的样本点均为随机取得,因而会存在一些空间填充度较低以及两两因素间的相关性过大的问题[20]。使用优化准则替代步骤3中的随机组合,可以让样本点在设计空间中分散开,使每一个样本点均能够充分描述样本空间性能。优化准则包括最大最小距离准则、φp准则、后验熵准则和中心L2偏差准则等[21]。其中常用最大最小距离准则,即最大化试验样本点对之间的最小距离,满足以下条件:
max{min1≤j,j≤n,i≠jd(xi,xj)}
(1)
其中
本文使用在最大最小距离准则下的拉丁超立方采样方法采样1 000个样本,其中随机抽取700个样本作为训练集,剩余300个样本作为测试集。抽样点分布示意图如图8所示,将采集到的1 000个样本投影到6个平面中,获取的抽样点在各投影平面内均保持有良好的均匀性与随机性,即具有良好的空间填充效果。依次观察各幅图的各坐标轴可知,抽样点在各因素取值区间内划分的各小区间上均有分布,即具有良好的边界分布效果。
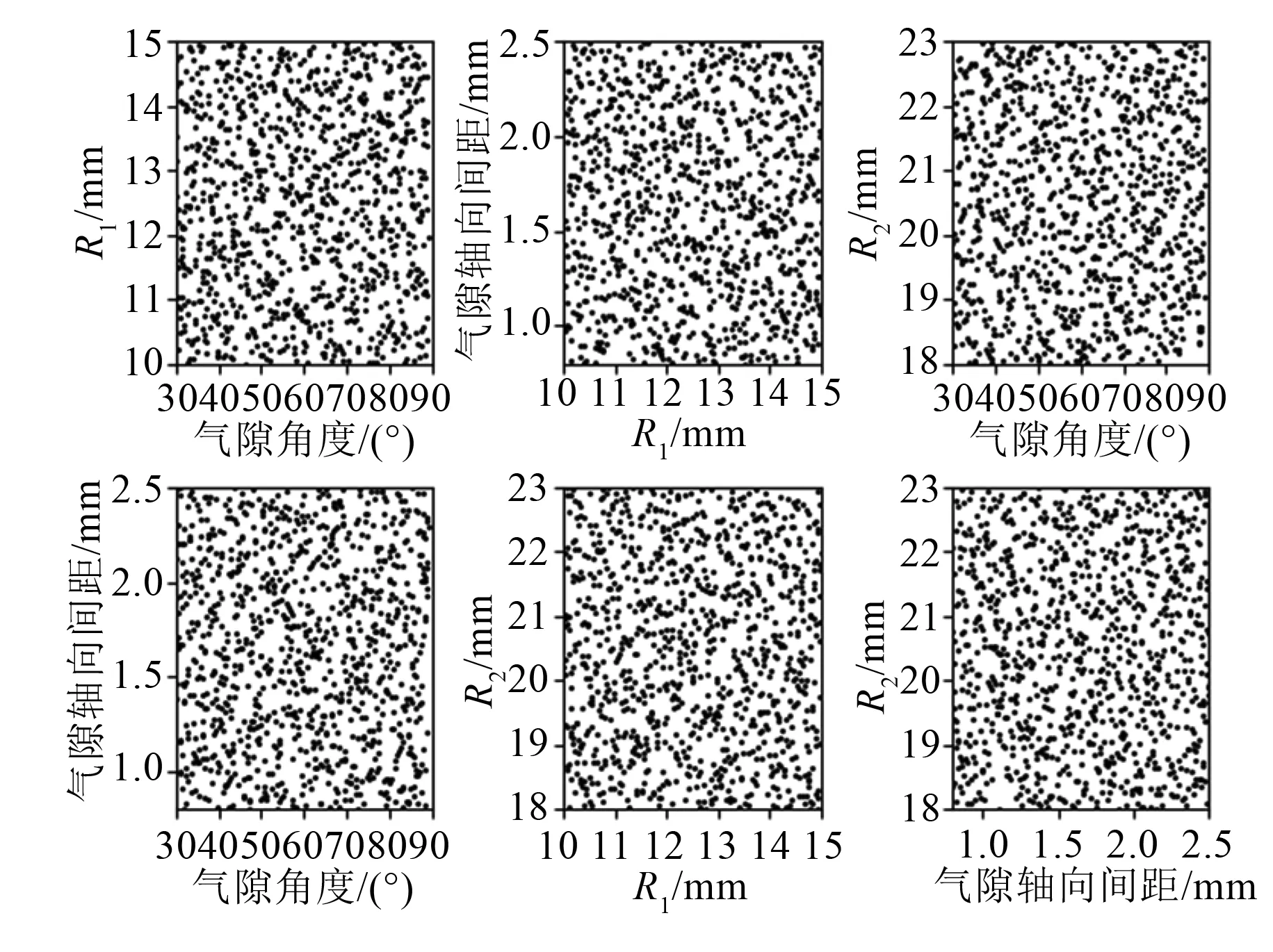
图8 抽样点分布示意图
5 DNN模型搭建
5.1 DNN的结构
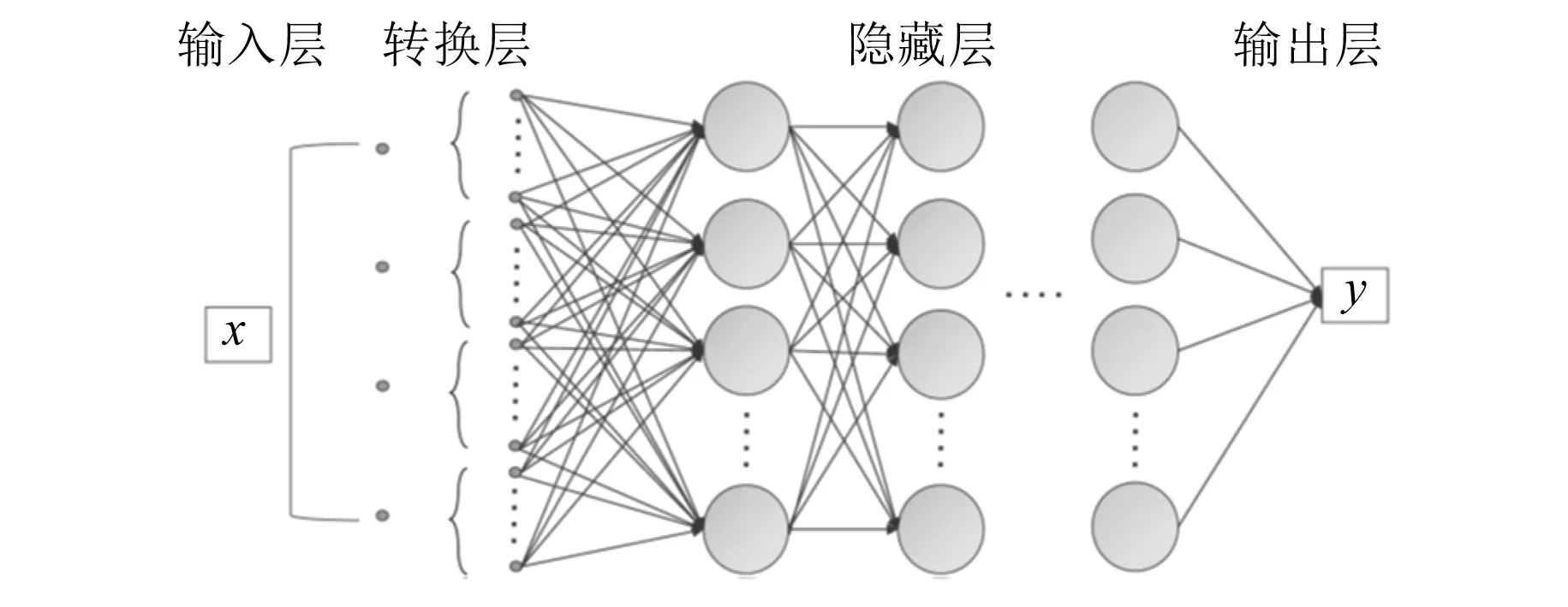
图9 DNN结构

图10 转化层关键点选取规则
本文采用PyTorch(1.7.1版本)机器学习框架搭建和训练DNN模型。优化器采用自适应矩估计优化(Adam)算法;隐藏层激活函数采用参数化修正线性单元(PReLU)函数[23],其数学表达式如下:

(2)
PReLU是一个带有参数α的ReLU函数,当参数α为0时,PReLU会退化为ReLU;如果α是一个很小的固定值,则PReLU退化为LReLU。由此可见PReLU可以自适应地学习ReLU的参数从而提高预测准确率。
对于回归问题,损失函数一般使用均方根误差即L2损失函数或者平均绝对值误差即L1损失函数。L2损失函数计算预测值与真实值之间距离的平方和,给予离群样本较大的权重,预测模型会以牺牲其他样本的误差为代价,朝减小离群样本误差的方向更新,最终降低模型的整体性能。L1损失函数计算目标值和预测值之差的绝对值之和,相对于L2损失函数来说,没有给予离群样本较大的权重,因此对于离群样本拥有更好的鲁棒性,但是L1损失函数大部分情况下梯度相等,这意味着即使对于小的损失值,其梯度也是大的,不利于函数的收敛和模型的学习[24]。本文使用SmoothL1Loss损失函数,其数学表达式如下所示:
(3)
其中,
式中:β为SmoothL1Loss损失函数的超参数,其取值与具体应用相关,本文β取值为20。
由上式可见,该损失函数是一个分段函数,相当于L1损失函数与L2损失函数的结合,当预测值和真实值差别较小时使用的是L2损失,解决了L1损失的不光滑问题;当预测值和真实值差别较大时使用的是L1损失,解决了L2损失的离群点梯度爆炸问题。
5.2 DNN的批标准化
为了控制各隐藏层内神经元的参数波动和提升网络的收敛速率,在DNN的每层隐藏层开始计算前,对输入的数据要进行批标准化(BN)[25]处理。如图11所示,使用批标准化和不使用批标准化的神经网络在训练过程中的训练集损失值变化曲线,可以看出,由于使用小批量梯度下降,每次微批的数据均不一样,批标准化会改变其均值和方差,可以看作引入了噪声,相对于不使用批标准化来说其损失函数的波动更大。使用批标准化可以增加模型的收敛速度,由图11可以分析出,在第200次迭代后使用批标准化可以让模型收敛到一个更小的损失值。
以前在农村,他们都是用座机,他也不觉得一个好端端的人,没事对着一个小匣子龇牙咧嘴地傻笑有什么好。就算女儿很有出息,他也不想活得那么得瑟,他不让我给他盖上城市人的戳,因为他永远都是个农村小老头儿。
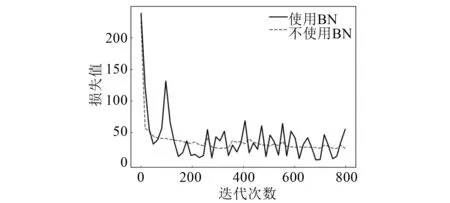
图11 有无批标准化处理训练集损失函数值的对比
6 DNN的精度验证
图12为DNN与传统预测模型(Kriging和RBF)的结果对比。其中Kriging模型是一种插值模型,能同时给出未知函数的估计值,对非线性和多峰函数能很好地近似拟合;RBF模型是一种局部逼近网络,能够逼近任意的非线性函数,具有良好的泛化能力以及很快的学习收敛速度,但是相对DNN模型只有1个隐藏层,特征学习能力更差,学习得到的特征对数据没有更本质的刻画。由图12可看出,从测试集中选出前15个样本,Kriging模型对0、1和2号样本拟合程度较高,但是对3~14号样本拟合程度较差;RBF实际值与预测值之间的差距比较明显;DNN模型对3~14号拟合程度比Kriging模型好。这是因为DNN的模型更加复杂,所以表达能力更强,能够用来表征更复杂的情况,对于离群样本有更好的拟合能力。如表2所示,测试集中前15个样本的DNN模型预测值与仿真模型实际值对比,模型预测的误差范围大致在2%~10%之间。

图12 DNN与传统预测模型结果对比

表2 DNN电机驱动力预测值和仿真值对比
通过DNN预测了测试集的电机结构参数对应的电机驱动力指标值,与测试集样本点数据比较后,计算了均方根误差(RMSE)、平均绝对误差(MAE)和R2(决定系数),以此对DNN与传统预测模型(Kriging和RBF)模型的预测精度做详细分析。各个指标的计算式如下所示:

(4)
(5)
(6)

如图13和表3所示,对于MAE来说,DNN模型对应的值较低,意味着其拟合精度较高。对于RMSE来说,DNN模型比传统模型低了接近一半,由于均方根误差对较大的残差更敏感,说明DNN模型的残差波动更小,符合图12的分析结果。决定系数R2反映模型拟合优度,用来评价回归模型的优劣,该值越接近1说明模型拟合程度越高。Kriging模型和RBF模型均低于0.8,而DNN模型的R2高于0.9,可见其间的精度差距比较明显。

图13 DNN与传统模型预测精度对比

表3 DNN与传统模型预测精度对比
7 结 语
本文研究一种基于DNN的舵机用永磁式线性力电机驱动力预测模型建立方法,作为后续启发式智能算法优化电机结构参数的代理模型。本文研究内容及结论如下:
(1) 对用于直驱式电液伺服阀的永磁式线性力电机的碎片剪切力分析和ANSOFT电磁仿真模型建立的基础上,确定了关键结构参数。
(2) 采用最大最小距离准则的拉丁超立方采样方法,获得较好随机性和均匀性的样本点。
(3) 引入DNN,基于样本库建立了电机驱动力预测模型。该DNN模型应用了PRuLU激活函数和SmoothL1Loss损失函数,使用BN控制各隐藏层内神经元参数的波动和提升网络的收敛速率。
(4) 设置结构参数到关键坐标点的转换层,增加网络输入的有效特征数量。
(5) 测试表明,与传统的预测模型Kriging和RBF相比,对于RMSE、MAE,本文的DNN模型表现更好,具有更高的预测精度和稳定性。该DNN模型的决定系数大于0.9,具有较好的拟合优度。