永磁同步电机注入谐波电流减小振动噪声的设计研究
2021-10-23许龙飞马艳秋胡利民
许龙飞, 马艳秋, 胡利民
(中国船舶重工集团公司 第705研究所昆明分部,云南 昆明 650101)
0 引 言
永磁同步电机(PMSM)具有控制简单、价格低廉、功率密度大等优点,在船舶动力推进、交通运输、航空航天、国防等伺服控制系统以及家用电器领域应用越来越广泛,但特有的电磁转矩脉动以及位置检测误差限制了其在高精确度位置、速度控制系统的使用。装备动力系统用PMSM及其逆变控制器属关重件,其振动噪声指标对装备质量目标的实现有较大影响。
国内外学者对如何抑制谐波电流,改善电机电流波形,抑制转矩脉动开展了大量研究工作。针对电机本体设计,抑制谐波电流的研究主要以优化电机本体设计,改善气隙磁场分布的正弦度为主[1-3]。针对逆变器开关器件的固有特性和死区时间引起的谐波电流,一般采用无死区开关控制模式[4-5]、时间补偿法和电流反馈型电压补偿法[6-7]等方法来抑制,但这些方法存在电流过零点检测不准确,导致误补偿的问题,且需要增加新的硬件,算法过于复杂,适用性差。
PMSM电流谐波分为5、7、11、13低次谐波和开关频率及其倍数次的高次谐波。对于脉冲宽度调制(PWM)斩波导致的高次电流谐波,通常采用改变逆变器拓扑、优化PWM策略、增加滤波器等方式降低逆变器输出的高次电压谐波[8]。对于水下辐射噪声来说,低频振动产生的噪声比高频振动产生的噪声传播得更远,因此,低次谐波电流的抑制更为重要。
对于低次谐波电流产生的转矩脉动,本文选择采用注入一定幅值和相位的低次谐波电流,产生谐波转矩与之抵消。本文将分别从谐波电流的提取、控制、注入系统等方面展开,并进行仿真和试验验证。
1 低次谐波电流幅值和相位提取
谐波电流的次数固定,负序分量和正序分量分别为6n-1和6n+1,在已知电机转速的前提下谐波电流频率则为已知量,因此本节的目的是在电机三相电流中提取出需要抑制频率的谐波电流的幅值和相位信息,本节以5、7次谐波电流为例,给出一种谐波电流提取技术即二阶广义积分滤波器。
谐波电流的提取本质上是滤除三相电流中其他频率的分量,得到所需要频率的变量并且保证所得到的信号没有幅值失真和相位失真,二阶广义积分器(SOGI)用于提取谐波电流较为合适。SOGI作为一种针对特定频率的滤波器其原理框图如图1所示。
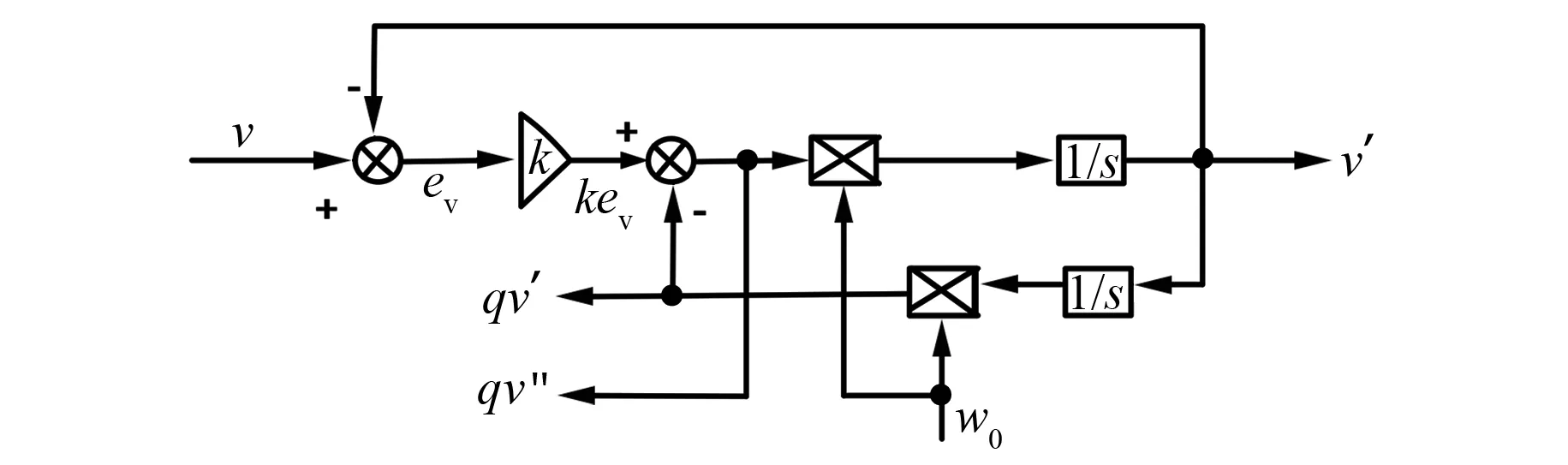
图1 二阶广义积分器原理图
图1中,k为阻尼系数;ω0为目标频率;SOGI的输入为v;v′为经过滤波后的输出信号,即v′表示输入v信号中频率为ω0的分量;输出信号qv′滞后信号v′相位0.5π;输出信号qv″超前信号v′相位0.5π;一般用于计算所提取正弦信号的幅值和相位。由图1可以推导得到SOGI的传递函数如下:

(1)
式中:ω0=2πf0,f0表示电机基波频率。
若电机基波频率为10 Hz,则5、7次谐波电流频率分别为50 Hz和70 Hz。令k=0.1,制作f0分别为10、50、70 Hz时SOGI传递函数的系统频率响应图(Bode图),如图2(a)所示。由图2(a)可以发现,SOGI在中心频率ω0附近的幅值增益为0 dB,相位衰减为0°,而对其他频率的交流信号均有幅值衰减和相位衰减,这种特性决定了SOGI适用于特定频率交流信号的提取。
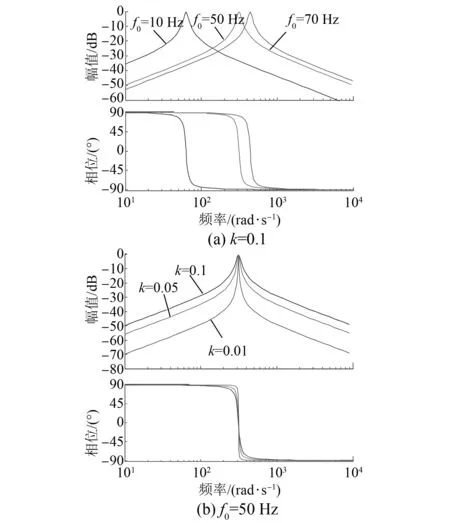
图2 SOGI传递函数的Bode图
图2(b)为f0=50 Hz,k分别为0.1、0.05、0.01时的Bode图,当系数k减小时,SOGI的幅频特性曲线变尖,相频特性曲线曲折处接近90°,这表明k值越小,SOGI对非中心频率的交流信号衰减越大,滤波效果越好,但是由滤波所带来的信号提取延迟则越大。若按照图3中正方向的规定,令中心频率ω0为5倍的电机基波频率,对于5次谐波电流iα5滞后iβ5的相位为0.5π,则在使用SOGI对α轴信号滤波时,v′为iα5,qv″为iβ5。对于7次谐波电流,令中心频率w0为7倍的电机基波频率,iα7超前iβ7的相位为0.5π,则在使用SOGI对α轴信号滤波时,v′为iα7,qv″为iβ7。所用到的基于SOGI的5、7次谐波电流检测算法如图3所示。
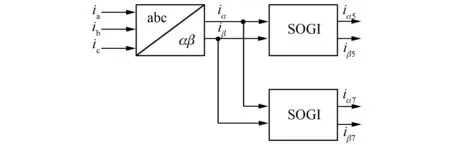
图3 基于SOGI的5、7次谐波电流检测框图
2 谐波电流控制
在传统的矢量控制中,实时采样得到的三相电流需要坐标变换至同步旋转轴系下,稳态时三相电流中的基波分量在同步旋转轴系下为直流量[9-10]。基于同样的坐标变换原理,稳态时5、7次谐波电流在对应的谐波同步旋转轴系下同样为直流量。本文中谐波旋转轴系定义如图4所示。
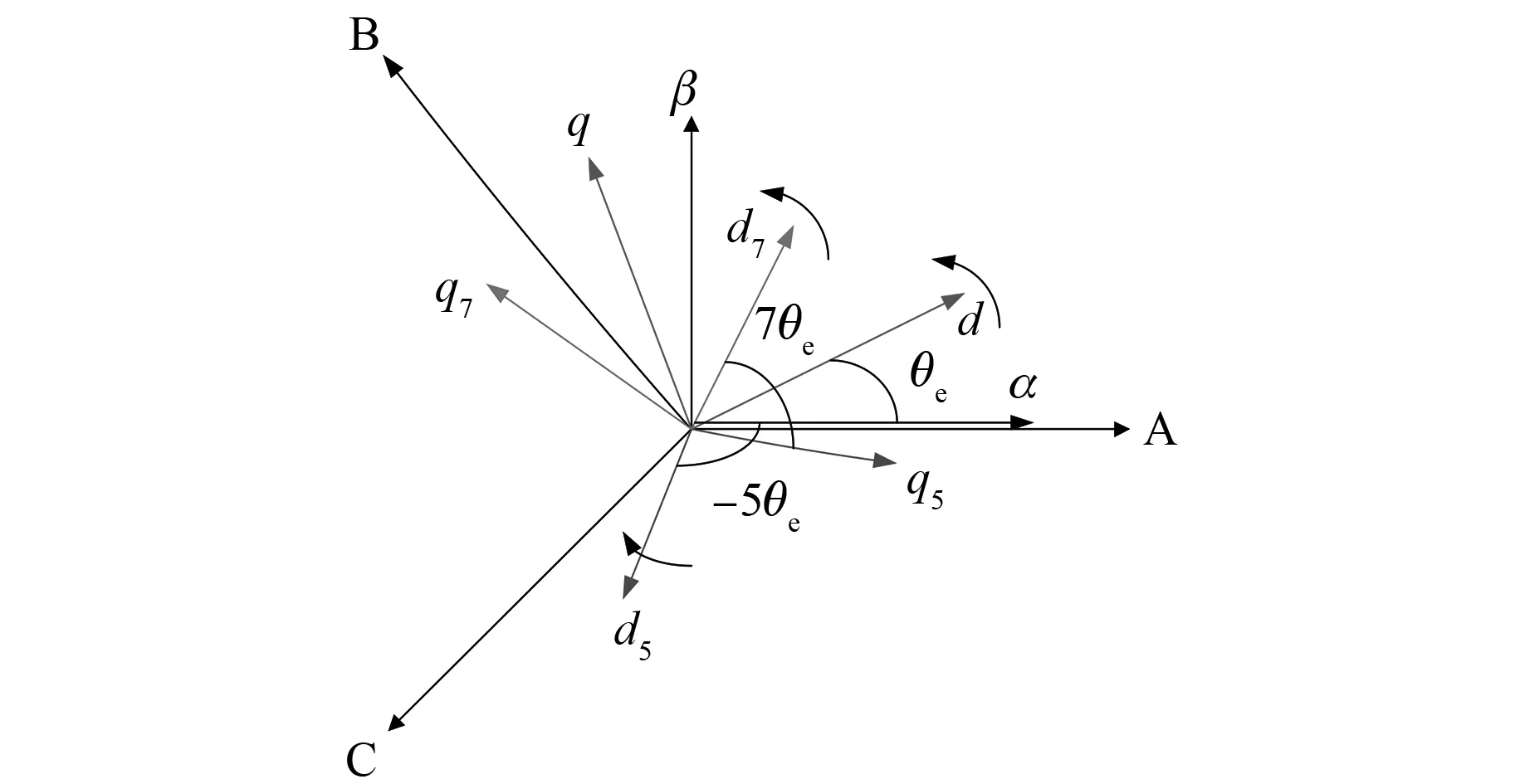
图4 谐波旋转坐标轴系定义图
在图4中,ABC代表静止坐标轴,分别对应三相绕组轴线,dq为同步旋转坐标轴;d5、q5为5次谐波同步旋转坐标轴,其转速为5倍同步电角速度,方向与同步旋转轴系转向相反;d7、q7为7次谐波同步旋转坐标轴,其转速为7倍同步电角速度,方向与同步旋转轴系转向相同。对于5、7次谐波电流的幅值和相位,分别用Id5、Iq5、Id7、Iq7来表示。
基于坐标变换的原理,同步旋转轴系下的6次谐波电流幅值、相位满足如下等式:

(2)

(3)
θd6=-arctan[(-Iq7+Iq5)/(Id7+Id5)]
(4)
θq6=-arctan[(Id7-Id5)/(Iq7+Iq5)]
(5)
由式(2)~式(5)可得转矩脉动幅值的大小与Id5、Iq5、Id7、Iq7之间所满足的关系为
Te6=
[(C1Iq7+C1Iq5+C2Id7+C2Id5+Te6_hcosθe6_h)2+
(-C2Iq7+C2Iq5+C1Iq7-C1Iq5+Te6_hsinθe6_h)2]-1/2
(6)
式中:C1、C2为常系数,C1=P(LdId+ψfd0-LqId),C2=P(LdIq-LqId)。
由式(6)可以发现,PMSM带恒定负载而工作于某一工况时,转矩脉动中的齿槽转矩不随电流大小而变化,其基波电流与谐波磁场产生的转矩脉动幅值和相位也为恒定值,因此可以通过控制谐波电流的幅值、相位来抑制总的转矩脉动。
在传统的矢量控制系统中,电流环采用同步旋转dq轴系下的PI控制器[5-9],这种控制器可以实现基波电流对直流指令无静差跟随,但是PI控制器对交流信号的控制能力有限,不能完全抑制谐波电流或无静差跟随交流指令。本节在以往研究的基础上,改进了谐波电流控制方法。
在图4的5、7次谐波旋转坐标轴系下,若不考虑逆变器谐波电压、永磁体谐波电动势,则PMSM系统的稳态电压方程为
(7)

(8)
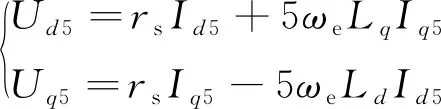
若考虑逆变器谐波电压、永磁体谐波电动势,则PMSM系统的稳态谐波电压方程可以写为

(9)

(10)
式中:Vd5、Vq5为逆变器5次谐波电压在5次同步旋转轴系下的直流量;Vd7、Vq7为逆变器7次谐波电压在7次同步旋转轴系下的直流量;Ed5、Eq5为永磁体所产生的5次谐波反电动势在5次同步旋转轴系下的直流量;Ed7、Eq7为永磁体所产生的7次谐波反电动势在7次同步旋转轴系下的直流量;Ud5、Uq5、Ud7、Uq7为5、7次谐波电流控制器输出的参考电压。
式(8)与式(9)中所有变量均为直流量,逆变器谐波电压V与永磁体产生的谐波反电动势E可以作为直流扰动,通过在控制器末端加入直流补偿电压,提升谐波电流控制器在电机加减速过程中对谐波电流的控制能力。
在PMSM系统中加入一个谐波电流环是传统的谐波电流抑制或控制方法之一[11-12]。一般谐波电流环分为谐波电流提取和谐波电压控制2个部分,其中谐波电流提取原理就是将三相电流经过坐标变换至5、7次同步旋转坐标轴系下,经过低通滤波器滤除交流量,得到直流量Id5、Iq5、Id7、Iq7作为传统谐波电流控制部分的反馈信号。


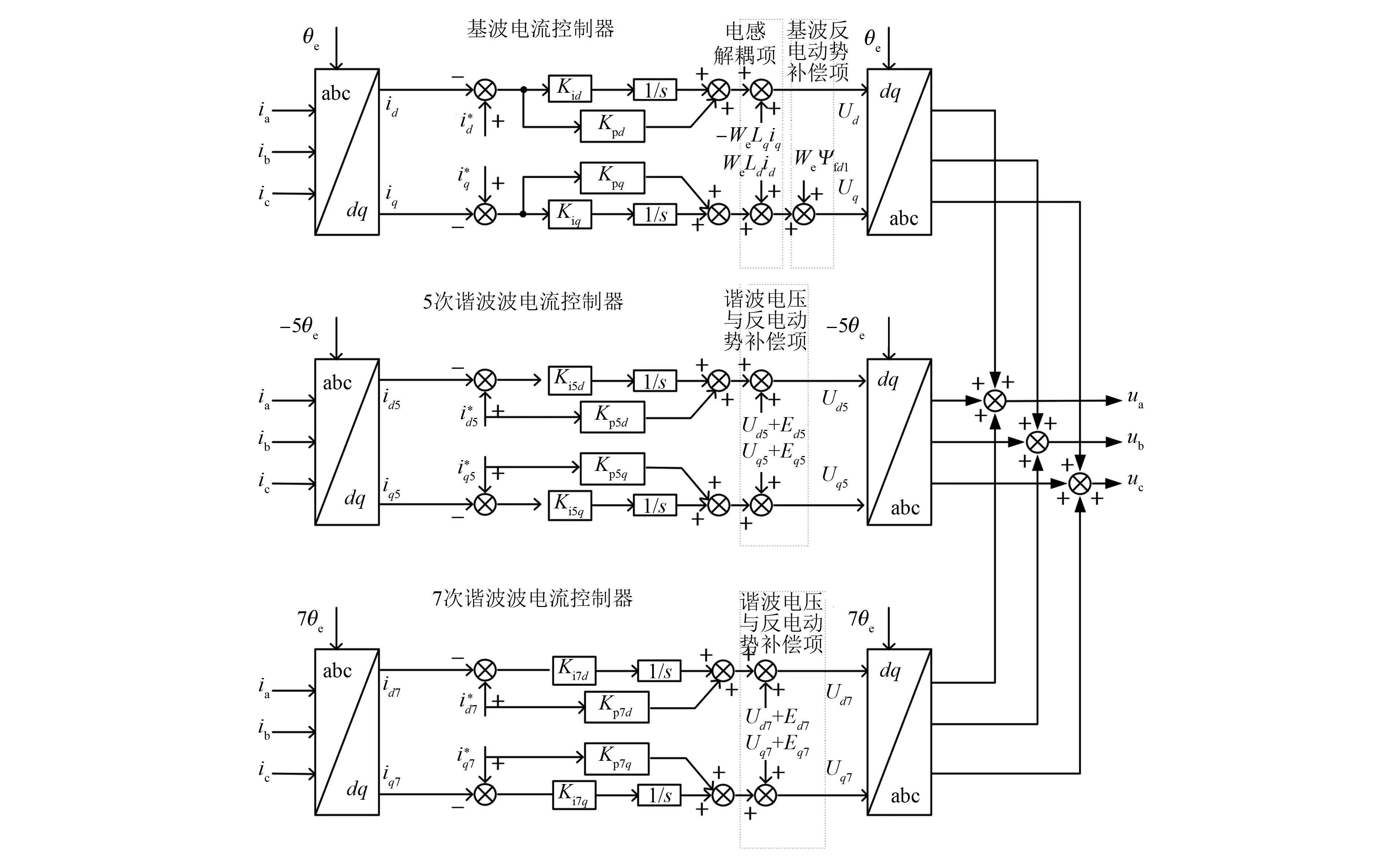
图5 改进型5、7次谐波电流控制框图
在5、7次谐波电流控制器中加入谐波电压和谐波反电动势补偿项,能够较好地补偿逆变器谐波电压和永磁体所产生的谐波电动势,提升控制器在电机加减速过程中的控制性能。此外,改进型的谐波电流控制器中舍弃了低通滤波器,这很好地解决了由于滤波器造成的控制延时,并极大加快了谐波电流对指令的跟随速度。
3 转矩脉动抑制策略
循环迭代法是智能控制系统中一种基础的方法,其本质上属于迭代学习算法,还可以用于求解非线性问题,因此适合用于PMSM这样一种非线性多输入多输出的系统[11-13]。循环迭代法的原理图如图6所示。
图6中,在n时刻已知自变量x(n)和函数y(n)的值,以及函数y在n时刻对自变量x的梯度∇n,若在n+1时刻自变量沿着n时刻梯度的反方向变化一个值,即:
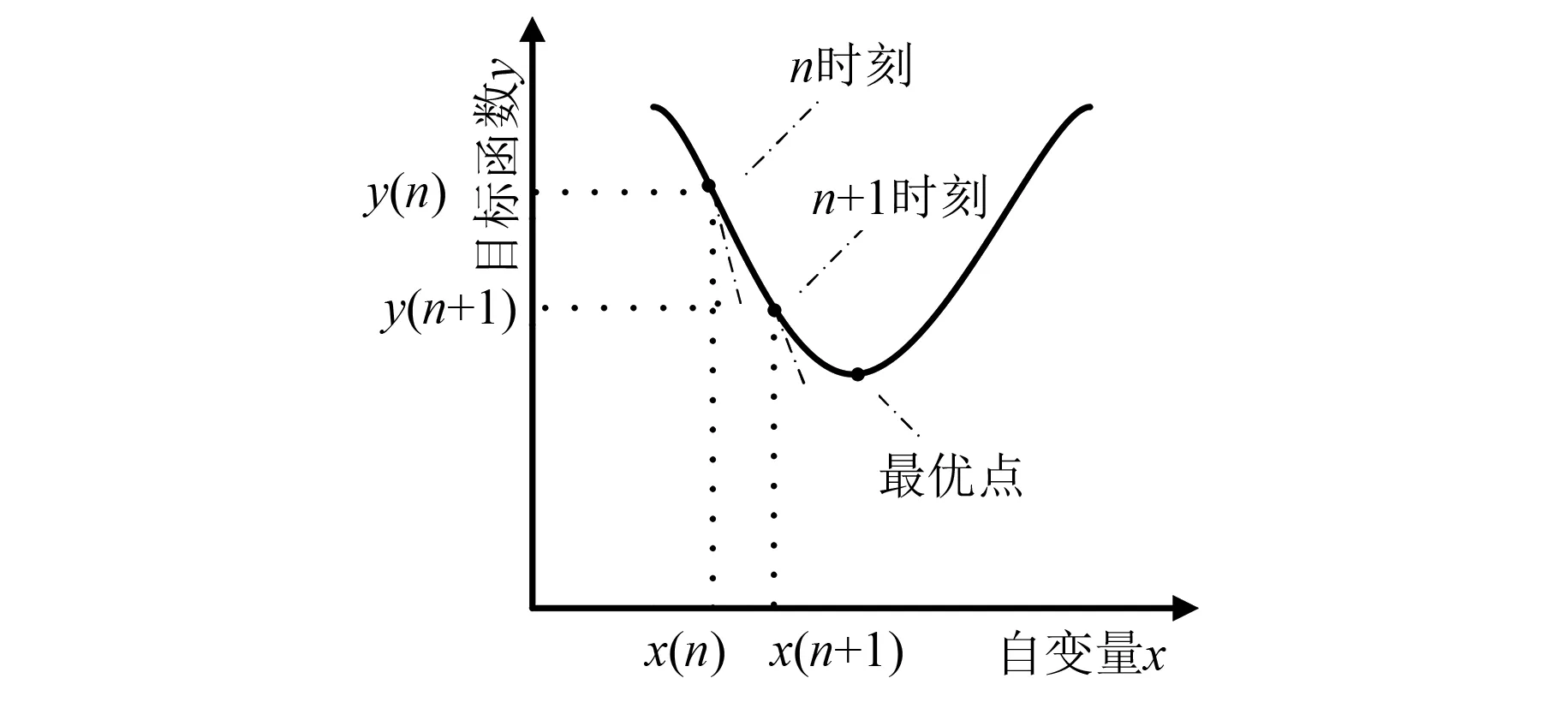
图6 循环迭代法原理图
x(n+1)=x(n)-η∇n
(11)
式中:η∇n为步长。
在n+1时刻,函数值y(n+1)比y(n)会减小,若在n+1时刻重复式(11)的过程,函数y会继续减小,通过迭代,函数值y最终会下降到最低点。
基于循环迭代法原理,以6次转矩脉动为例,本文在转矩脉动抑制策略中选取6次转矩脉动幅值Te6最小值为初级目标函数。由文献[8]可知6次转矩脉动幅值与5、7次谐波电流之间满足如式(6)所示的表达关系。
若要完全抑制6次转矩脉动,5、7次谐波电流必须满足:

(12)
理论上,式(12)有无穷解组,因此在其他变量不变时,2个自变量便足以实现6次转矩脉动完全抑制,本文中选取5次谐波电流对应的2个变量Id5、Iq5作为循环迭代法的自变量,同时利用谐波电流控制器保证其余变量Id7、Iq7为恒定值。目标函数表达式如下:
minf(Id5,Iq5)=Te6
(13)
根据图6,若要实现目标函数调整至最优点,必须根据当前i时刻的梯度,更新下一时刻谐波电流指令,梯度计算方法如下:

(14)
在(i+1)时刻,5次谐波电流指令更新为


(15)
式中:η1和η2为步长或学习率;“-”代表梯度的反方向。
若保证7次谐波电流为恒定值,则由以上方法,经过多次迭代后,6次转矩脉动必定会下降至最小值。
这种基于循环迭代的转矩脉动抑制方法本质上是注入特点幅值和相位的谐波电流,使其所产生的谐波转矩与原有对应次数的转矩脉动对消。
6次转矩脉动抑制算法总的控制框图如图7所示,该算法不仅适用于6次转矩脉动抑制,还可以扩展至高次如12次、18次转矩脉动的抑制中。

图7 转矩脉动抑制算法整体控制框图
在传统转速-电流环双闭环矢量控制调速系统基础上,加入了转矩脉动抑制算法。基于转速波动检测建立转矩脉动观测器得到转矩脉动幅值大小。利用循环迭代找到最优的谐波电流指令,再通过谐波电流控制器实现对最优谐波电流指令的准确、快速跟踪。
4 谐波电流注入仿真和试验
4.1 仿真验证
此处在MATLAB/Simulink下进行了对比仿真分析,为了模拟电机产生的空间谐波磁场,电机仿真模型中引入了谐波磁链。
仿真中所用PMSM参数如表1所示。图8为电机带负载运行于200 r·min-1,电机定子电流基波频率为4 Hz时,加入谐波电磁转矩抑制算法前后仿真结果波形对比图。
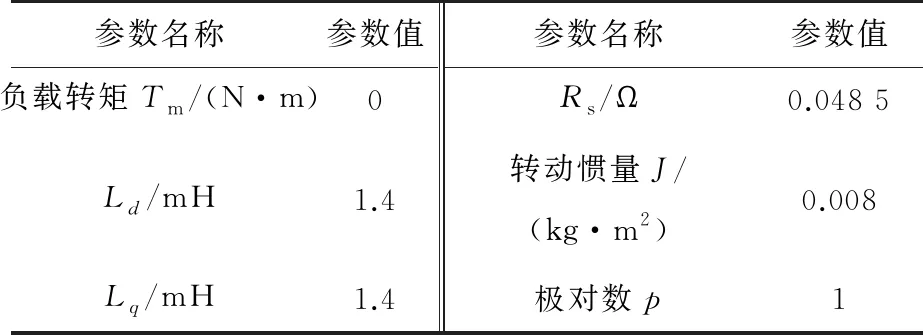
表1 永磁同步电机参数

图8 仿真结果
如图8(a)所示,在加入谐波电流抑制算法之前,电机电流波形谐波分量较重,出现严重的波形畸变。如图8(b)所示,加入谐波电流后,电机电流的波形有明显的改善,正弦度明显提高。而图8(c)、图8(d)是将电机转速波形经傅里叶变换得到的电机转速的6次脉动幅值对比图,注入谐波电流前后,电机转速的6次脉动幅值由8.8 r·min-1下降到0.01 r·min-1以下。
经过对比分析可知,采用注入谐波电流的方法后,5、7次谐波电流均得到了很好的抑制,对三相电流进行傅里叶分析后可知,其中A相电流中的5、7次谐波电流分量的占比分别从7.29%、4.00%下降到0.08%、0.06%。
4.2 试验验证
为了验证所提出算法的有效性,将该算法应用于一套基于DSP28335平台的内置式PMSM系统。
图9为电机转速为60 r·min-1,定子电流频率为20 Hz时,注入谐波电流前后的试验结果对比波形。加入算法前,电机反电动势波形较为正弦,振动噪声最大值达到了110 dB左右,在加入算法后,在电机绕组中注入了幅值为47.5 A、相位160°的5次谐波电流,电机反电动势波形明显畸变,虽然正弦度小了,但电机的振动噪声测试结果却表明电机在运行过程中产生的振动噪声明显减小,振动幅值大幅度下降了10 dB。经试验验证后的注入谐波电流方法在满足平台可靠性等质量通用特性管理及电磁兼容要求前提下,实现搭载平台对此测试并取得较好结果。
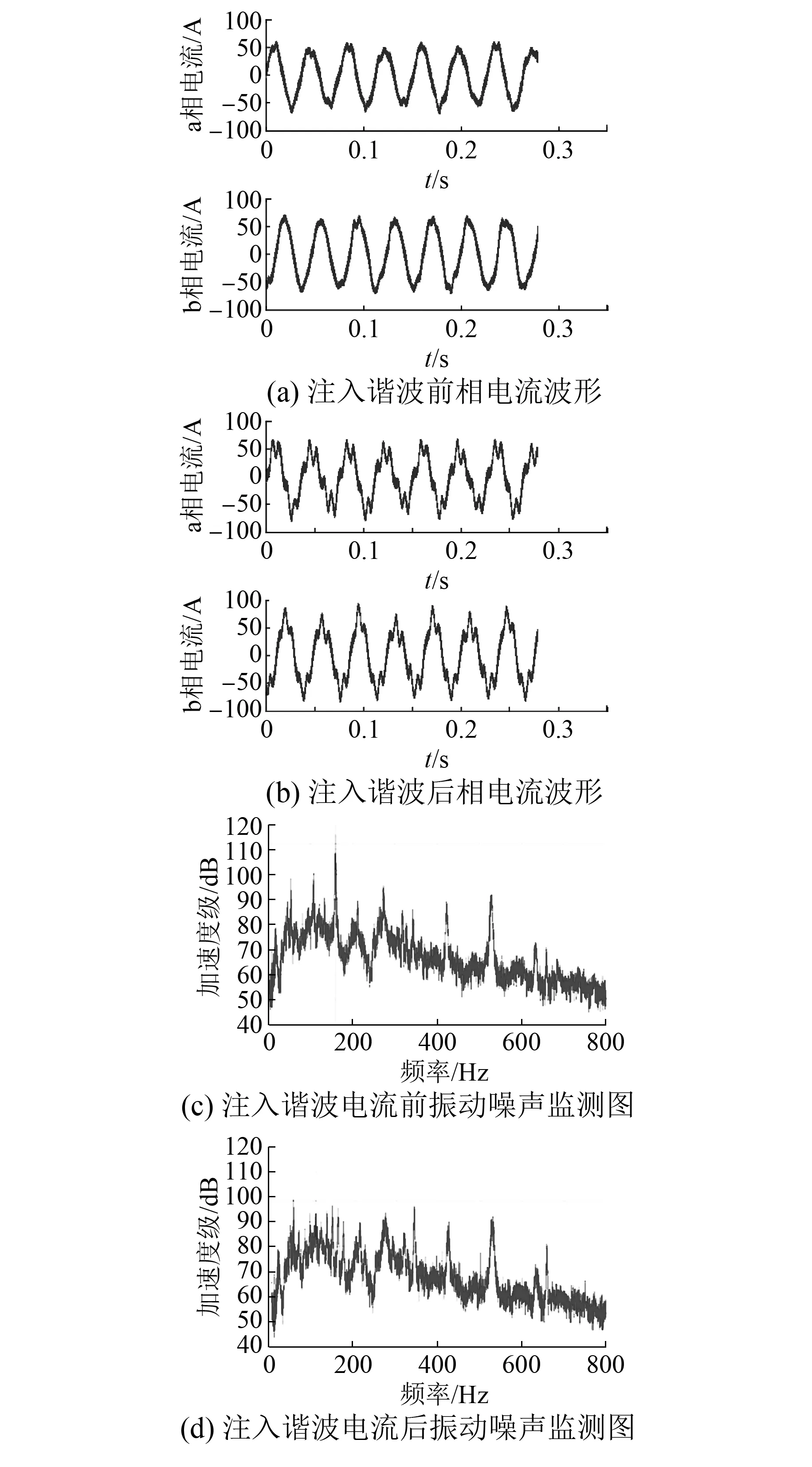
图9 试验结果
在本次试验中,采用B&K PULSE振动噪声测试系统来监测试验过程中电机的振动噪声,该系统基于PULSE Lab shop分析软件和LAN-XI数据采集硬件。
由表2可知,在注入谐波电流前后,振动噪声下降了10 dB,在输入电压值不变、电流值稍微增大的前提下,电机的输出功率没有变化。电机的效率下降了0.07,虽略有下降,但达到了减小电机振动噪声的目的。

表2 注入谐波前后输出功率、效率对比表
5 结 语
本文提出了一种通过向相电流中注入低次谐波电流产生谐波转矩来抵消原PMSM中谐波电流引起的转矩脉动的策略,可对装备动力系统质量目标的实现提供一种减振降噪技术支持,仿真和试验结果表明所提出的策略对永磁无刷电机的转矩脉动、转速波动以及机械振动(谐波注入只对对应次数的谐波引起的振动有削弱作用,对其他原因引起的振动无效)均有明显的削弱作用。但注入谐波电流后不仅会使电机电流波形畸变,还会产生铜耗和铁耗,降低系统的效率,在此策略的基础上如何提高效率是进一步的研究方向。
