基于自适应摩擦补偿的复合非线性轨迹跟踪控制*
2021-10-23程国扬
石 暕, 程国扬
(福州大学 电气工程与自动化学院,福建 福州 350108)
0 引 言
摩擦现象存在于伺服机构中产生相对运动(或趋势)的2个接触表面之间。摩擦力(或力矩)不但与运动速度和位移有关,也与外部作用力有关,体现出复杂的非线性动态特性[1]。特别是,在运动速度趋于零时,摩擦阻力的幅值反而增大,这种Stribeck效应使摩擦在低速区域的影响更显著,原因是伺服系统在接近目标位置时,运动速度和控制力度通常均要减小,而这时由于摩擦阻力变大,将导致系统减速乃至停顿下来,从而出现了稳态误差。若控制系统直接采用积分器来补偿摩擦阻力引起的静态误差,则积分器必须积累到足以克服最大静摩擦力的数值,系统才能由静止转为运动,而系统开始运动之后,摩擦阻力急剧变小(Stribeck效应),但这时控制力度并未明显变化,将导致系统加速度增大而出现过冲。这就是伺服系统产生“爬行”现象和极限环振荡的根本原因。摩擦现象严重影响了伺服系统的性能,甚至威胁到系统的稳定性[2-3],这在实际应用中意味着生产效率的降低和能源的浪费。因此,在设计伺服系统时,必须考虑采用适当的控制与补偿方法来消除摩擦对系统的影响,才能实现精确伺服控制[4]。
由于摩擦的非线性、复杂性和可变性,摩擦补偿的研究往往存在许多困难,现有研究结果并没有达到让人满意的效果,目前还没有一种方法能完全消除摩擦带来的不利影响。研究人员主要从基于模型和不基于模型2方面进行摩擦补偿的研究。摩擦的机理较为复杂,难以建模,且摩擦力的大小可能取决于速度、位置、状态等,因此摩擦模型并不完全准确,又考虑到摩擦具有时变性,可以利用自适应技术对补偿器参数进行在线调整,从而改善摩擦补偿的效果[5-6]。目前,国内外已经提出了各种各样的自适应技术,并应用于摩擦补偿中。文献[7]采用双观测器估计LuGre摩擦模型中的部分不确定性参数,提出非线性自适应反步摩擦补偿控制方法,提高了系统的控制性能。文献[8]提出基于自适应区间二型模糊逻辑系统对摩擦力进行补偿建模,并在该补偿方法的基础上设计一个鲁棒自适应控制器,提高了系统的跟踪性能。文献[9]提出了一种用于伺服机构速度控制的自适应扰动补偿方案,采用基于LuGre摩擦模型设计的摩擦补偿器,有效减小了反向运动时经常出现的大轮廓误差。文献[10]提出了一种带有摩擦观测器的自适应非线性控制方案,用于电动液压执行器的位置控制。文献[11]针对数控机床提出了一种对摩擦参数进行在线学习的方法,并生成摩擦补偿脉冲幅值函数,实现了摩擦的自适应补偿。
本文针对电机伺服系统,采用文献[12-13]中的控制方法,设计了一个带有扰动补偿的复合非线性轨迹跟踪控制器,使伺服系统能对给定的目标轨迹信号进行跟踪。在轨迹跟踪控制器的基础上,加入了自适应摩擦补偿环节,进一步消除摩擦带来的不良影响,提升系统的控制性能,并通过对不同类型目标轨迹信号进行轨迹跟踪试验的方式验证该方法的有效性和自适应性。
1 复合非线性轨迹跟踪控制
本节为电机伺服系统设计一个轨迹跟踪控制律,实现对给定的目标轨迹的准确跟踪。系统的简化模型(假定摩擦力矩已预先补偿)如下[13]:

(1)

定义轨迹跟踪的误差信号为:

(2)
式中:ey(t)为位置误差;ev(t)为速度误差;r(t)为有界的目标轨迹信号,其一阶和二阶导数均有界。
则可得:

(3)
且有

(4)
则误差系统的动态方程为

(5)
针对系统式(5),采用文献[13]的方法,可设计一个复合非线性控制律,如下:

(6)
式中:F为状态反馈增益矩阵,使(A+BF)具有稳定的特征值,且系统的输出响应较快;Fn为非线性反馈增益矩阵。
F、Fn分别如下所示:
(7)

(8)
式中:ζ和ω为闭环主导极点的阻尼和自然频率。
ρ[ey(t)]为非线性增益函数,可选为

(9)
式中:α、β均为非负的可调参数。
(10)

系数矩阵如下:
(11)
式中:ζ0、ω0分别为观测器极点的阻尼系数与自然频率。
将观测器估计的值代入式(6),可得:

(12)
再与式(4)相结合,得到轨迹跟踪控制律为:

(13)
式中:fd为扰动补偿增益系数,是一个可调参数,取值范围为[0,1],其值越大,则补偿效果越好,但过大的fd会使系统对噪声干扰较敏感。
2 自适应摩擦补偿
复合非线性轨迹跟踪控制律虽然可以在一定程度上进行扰动补偿,提高伺服系统的性能,但是系统中存在的时变非线性摩擦力矩会对系统的性能产生较大的影响。为了消除摩擦带来的不利影响,需要对摩擦进行补偿,本文使用的是自适应摩擦补偿方法。
本文中,摩擦力矩建模为一个时变摩擦系数乘以一个分段函数,如下[14]:

(14)
式中:kc(t)为时变摩擦参数,且kc(t)≥0;σ0(·)为一个分段函数。
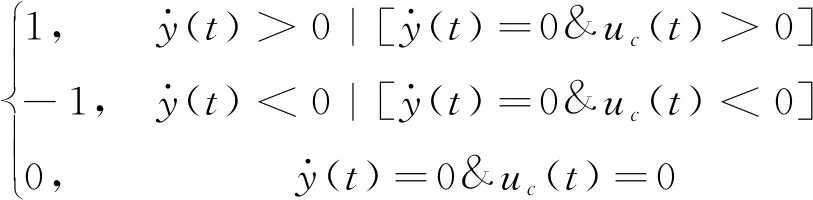
σ0(·)定义如下:

(15)
虽然该摩擦模型不涉及复杂的数学计算,但它包含了零速度下静摩擦力矩的主要特性,且摩擦模型中的kc(t)为时变的,因此,该模型可以表示普遍的摩擦行为。
总控制输入u(t)由轨迹跟踪控制的控制量uc(t)和摩擦补偿动作uf(t)组成,即
u(t)=uc(t)+uf(t)
(16)
其中uf(t)定义为

(17)


(18)
改进的符号函数与标准sgn函数不同的地方是,能确保一个足够的补偿动作。若使用标准的sgn函数,则当速度为零(即系统处于静止状态)时,即使当前的位置不是期望的位置,摩擦补偿量也将变为零。因此,需要使用改进的sgn函数使系统的补偿能力进一步提高,在系统处于静止状态时,也能进行适当的补偿。只有在系统静止,且uc(t)为零的时候,才停止补偿。

(19)
式中:ey(t)为位置误差;ev(t)为速度误差;δ、λ为用户定义的非负调优参数。

因此,系统的总控制输入为

(20)
3 仿真验证
为了验证轨迹跟踪控制的效果以及自适应摩擦补偿的性能,进行仿真试验。
在仿真中,设置采样周期Ts=0.1 ms,二阶系统模型参数为,a=-5,b=260;轨迹跟踪控制算法的参数设置为,ζ=0.3,ω=30 rad/s,ζ0=0.8,ω0=100 rad/s,α=10,β=0.8,umax=12 V;摩擦补偿器的参数为,λ=25,δ=40,ε=0.001。
系统中的摩擦模型为

(21)
kc(t)为时变的摩擦参数:

(22)
在仿真中,给定一个正弦输入信号r(t)=sin(πt+π/6),系统中存在摩擦环节和一个值为-0.5 V的定常扰动(负载),通过仿真观察轨迹跟踪控制算法和自适应摩擦补偿的应用效果。图1~图3分别为无补偿(fd=0且不补偿摩擦)、 仅扰动补偿(fd=1且不补偿摩擦)、扰动补偿加摩擦补偿3种情况的仿真结果。
从图1可以看出,如果既不补偿扰动也不加入摩擦补偿,系统的输出信号与目标信号之间将出现明显的偏差,并且存在平顶现象,扰动和摩擦的存在导致了跟踪误差,而平顶现象主要是由摩擦导致的。从图1中还可以观察到,第2 s之后的跟踪效果明显不如第2 s之前的跟踪效果,这是因为摩擦力的大小发生了变化,随着摩擦力的增大,跟踪误差也越来越大,轨迹跟踪性能显著下降。

图1 无补偿时的正弦波跟踪仿真结果
从图2可以看出,扰动补偿的加入,减小了跟踪误差,但平顶现象仍然存在,这说明了扰动补偿虽能对系统中的定常扰动起到良好的抑制作用,但对系统中存在的时变摩擦并不能有效地加以抑制,因此,有必要引入额外的措施对摩擦环节进行补偿。

图2 仅扰动补偿的正弦波跟踪仿真结果
从图3中可以看出,在扰动补偿的基础上,再加入自适应摩擦补偿,系统的跟踪性能得到了很大的提升,消除了平顶现象,说明该补偿器有很好的补偿效果,能有效地消除摩擦环节带来的不良影响。
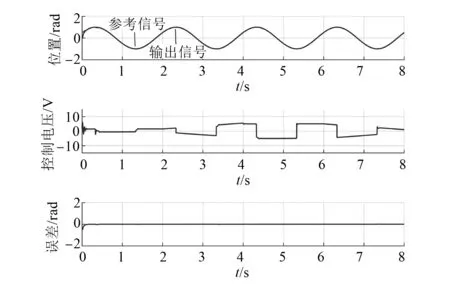
图3 扰动补偿加摩擦补偿的正弦波跟踪仿真结果
为了验证摩擦补偿方法的适应性,现将目标轨迹信号改为超越函数信号r(t)=2·esin πt来测试轨迹跟踪效果,仿真结果如图4~图6所示。从图4可以看出,无补偿时,系统的跟踪性能较差,存在较大的跟踪误差和平顶现象。从图5可以看出,加入扰动补偿后,显著地减小了跟踪误差,但依然存在平顶现象。从图6可以看出,加入摩擦补偿后,原先存在的跟踪误差和平顶现象均被消除,系统能很好地对超越函数信号进行轨迹跟踪,摩擦补偿起到了令人满意的效果。仿真结果证明了该控制方法在不同的目标轨迹下也能实现摩擦补偿,具有自适应性。

图4 无补偿时的仿真结果(超越函数)
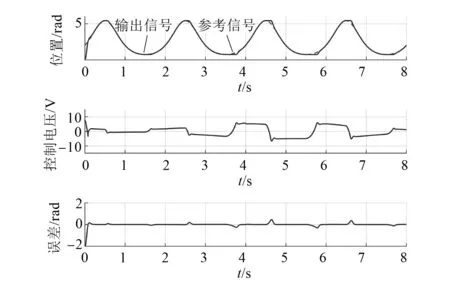
图5 仅扰动补偿的仿真结果(超越函数)
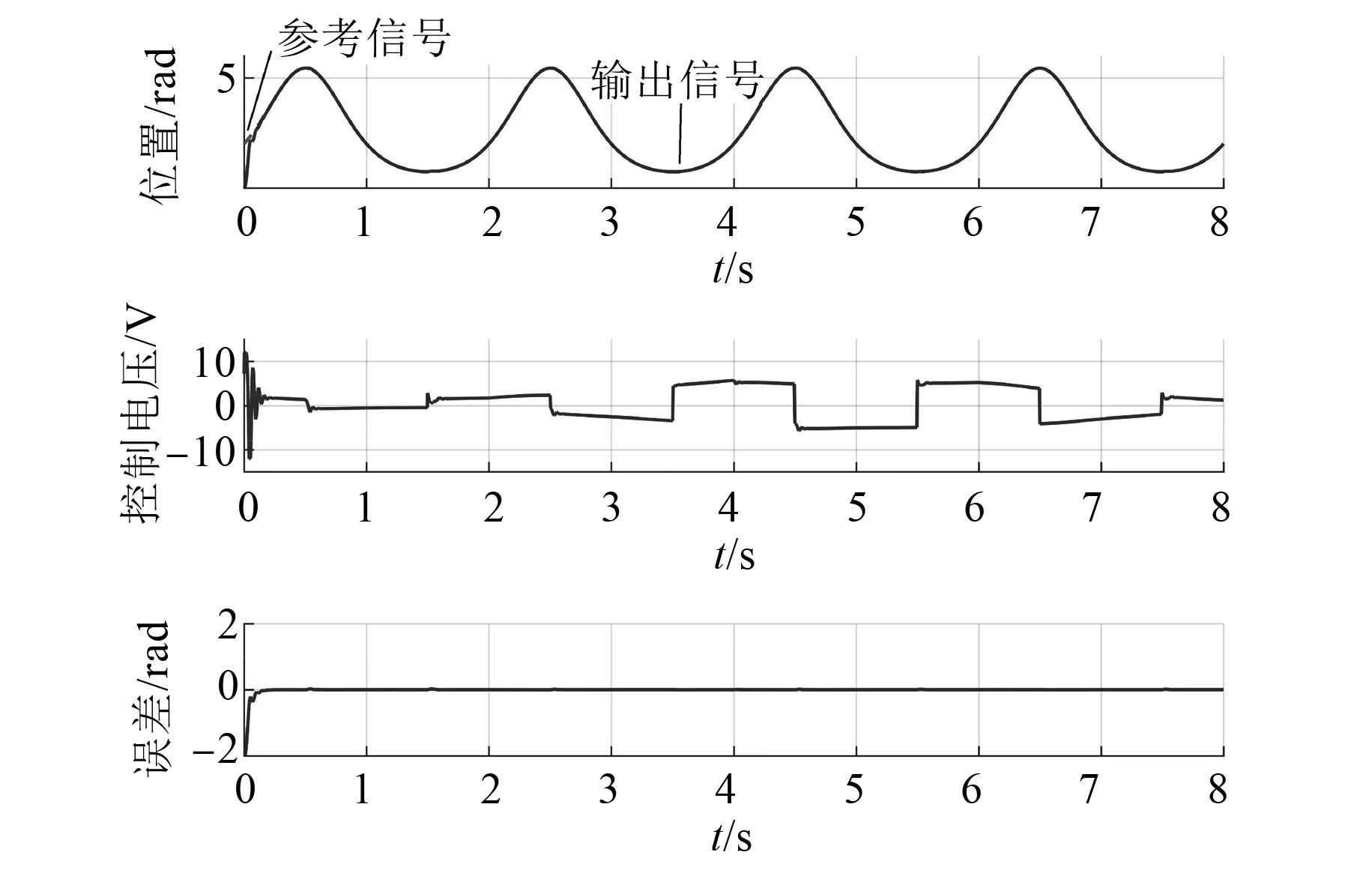
图6 扰动补偿加摩擦补偿的仿真结果(超越函数)
4 试验验证
利用TMS320F28335DSP对复合非线性轨迹跟踪控制和自适应摩擦补偿算法进行编程,并通过一个直流电机伺服系统进行试验验证,如图7所示。

图7 直流电机伺服系统
为了验证控制律中扰动补偿与自适应摩擦补偿的效果,将分别进行无补偿、有扰动补偿、扰动补偿加自适应摩擦补偿3种方案下的轨迹跟踪试验。试验中给定的输入信号为r(t)=πsin 2πt,并在程序中设置了一个方波信号,当方波处于高电平时,控制电机对目标轨迹进行跟踪,当处于低电平时,电机位置回零。既能看到完整的正弦波轨迹,又能看到轨迹跟踪的瞬态和稳态过程。试验的采样周期设为Ts=2 ms,模型参数和控制律的参数设置均与仿真中相同,自适应补偿器的参数设置为,λ=60,δ=4,ε=0.001。各方案的试验结果分别如图8~图10所示。
由图8可以看出,当控制律中无补偿(fd=0)时,系统的跟踪性能较差,存在较大的稳态误差和明显的平顶现象。由图9可以看出,加入扰动补偿(取fd=0.95,在控制精度和噪声敏感度之间折中),能明显地改善系统的跟踪性能,但仍然会存在平顶现象。由图10可以看到,在扰动补偿的基础上加入自适应摩擦补偿之后,几乎完全消除了平顶现象,并且能够很好地进行轨迹跟踪,降低了稳态误差,提高了跟踪精度,证明了所提摩擦补偿方法的有效性。

图8 无补偿时的正弦波跟踪试验结果
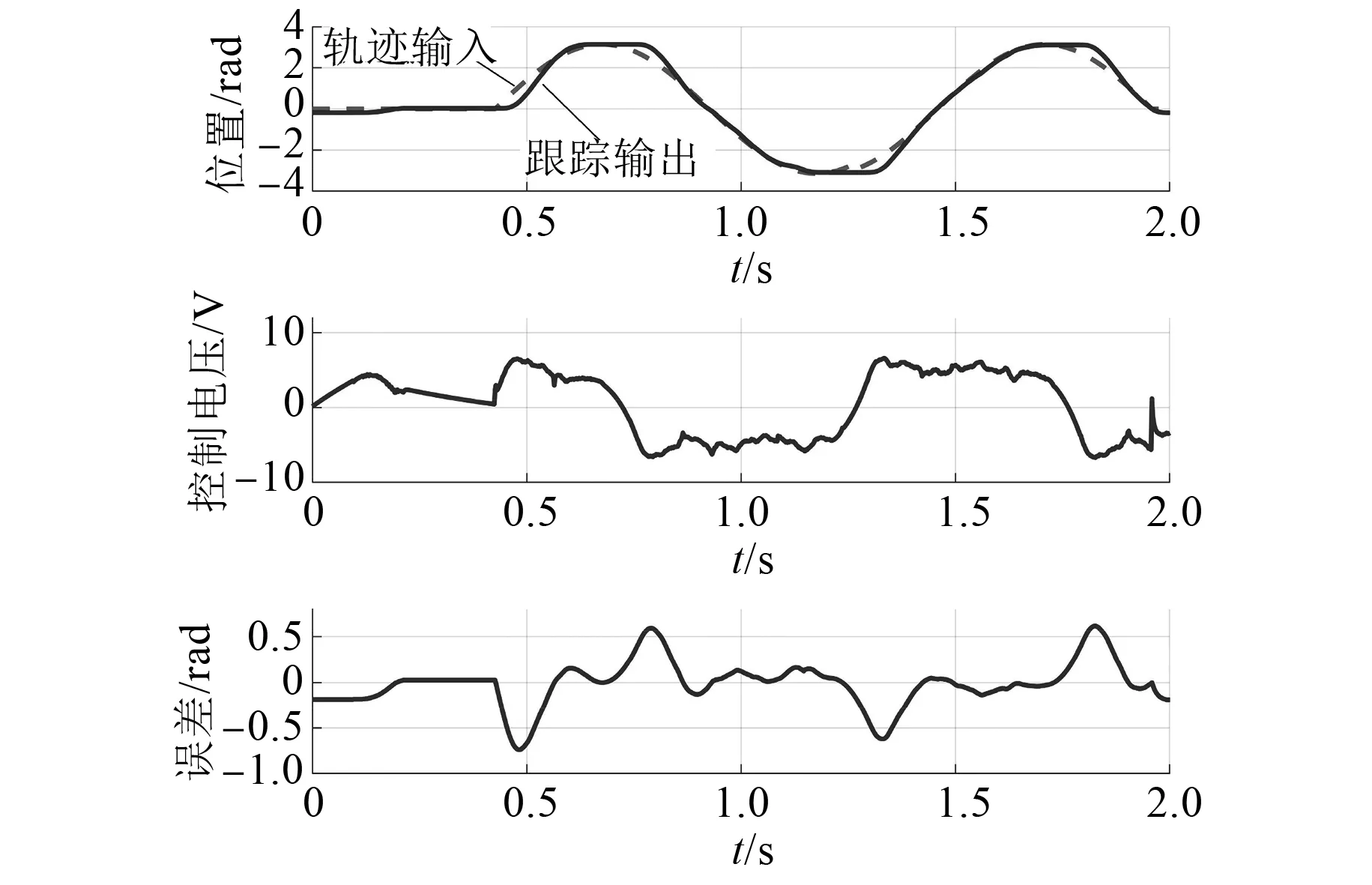
图9 仅扰动补偿的正弦波跟踪试验结果

图10 扰动补偿加摩擦补偿的正弦波跟踪试验结果
为了进一步验证该摩擦补偿方法的自适应性,将输入信号改为超越函数信号r(t)=esin(4πt),再进行轨迹跟踪试验。试验结果如图11、图12所示。从试验结果可以看出,加入摩擦补偿后,消除了原来存在的平顶现象和稳态误差,使系统能对超越函数信号很好地进行轨迹跟踪,说明该控制方案对不同类型的目标轨迹也能达到很好的跟踪效果,体现了摩擦补偿方法的适应性。
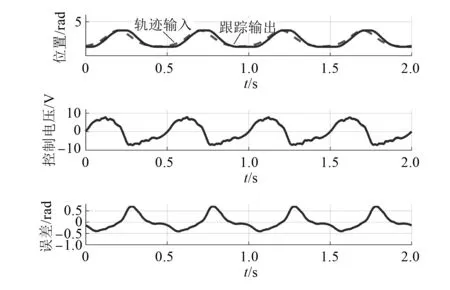
图11 仅扰动补偿(摩擦不补偿)时的超越函数信号跟踪的试验结果

图12 扰动补偿加摩擦补偿的超越函数信号跟踪的试验结果
5 结 语
针对电机伺服系统,设计了一个带有扰动补偿的复合非线性轨迹跟踪控制器,又考虑到系统中存在的非线性摩擦环节将导致系统性能的下降,使其不能很好地对目标轨迹进行跟踪。因此,在轨迹跟踪控制的基础上,加入一个自适应摩擦补偿环节,以消除摩擦力对系统产生的不良影响。为了观察摩擦补偿的效果,在无补偿、仅扰动补偿、扰动补偿加自适应摩擦补偿3种情况下,进行了轨迹跟踪的仿真与试验。仿真与试验结果一致表明,复合非线性轨迹跟踪控制中的扰动补偿能有效改善系统的跟踪性能,但并不能很好地消除峰顶和谷底的平顶现象。而自适应摩擦补偿的加入,则消除了平顶现象,明显降低了系统的稳态误差,几乎完全消除了摩擦力带来的不良影响,实现系统对目标轨迹的准确跟踪,体现了该自适应摩擦补偿方法的有效性,并且通过给定一个不同类型的目标轨迹信号再次进行轨迹跟踪试验,证明了该方法对不同类型的目标信号也能很好地进行轨迹跟踪,具有期望的适应性。