基于动态边缘率的长大隧道车辆控速系统构建与效果分析
2021-10-22狄海波李世佳杨飞雄刁成良
黄 兵, 狄海波, 李世佳, 杨飞雄, 刁成良
(1.四川雅康高速公路有限责任公司,四川 成都 610047;2.武汉理工大学,湖北 武汉 430063)
0 引 言
随着社会的发展,人民生活水平的提高,汽车保有量逐渐上升,交通事故率也随之增加,据统计,有90%的高速公路交通事故由驾驶员因素导致,其中比例最高的是车辆超速,达到了10%[1],由此可见,超速现象在我国较为多见,形势严峻。因此,为了减轻事故强度、降低事故发生率,必要措施是降低车速和车速差。通常把在某一路段上行驶的所有车辆因速度不同造成的车速不均匀现象称作车速差,也叫车速离散度。
为降低车速及车速离散度,国内外学者基于视觉信息对驾驶员影响的规律,利用边缘率改变时空频率,通过增大路缘标线相对于人眼运动的时间频率使驾驶员高估车速,进而诱导驾驶员主动采取制动降低车速[2]。国外有学者[3]研究发现,驾驶员会受边缘标线的影响从而采取降低车速的行为;还有学者[4]发现驾驶员在决策停车距离和跟车距离时会受到边缘标线的影响,这一结果是通过计算机仿真试验实现的,并得出了边缘率和光流率与理想加速度的关系模型。Katz[5]设计了相同距离的边缘率路面标记实验,前后试验的数据对照结果表明车辆平均速度下降了6 km/h。关于国内的研究,杜志刚等[6]根据驾驶员对速度和车距的视觉效应与环境相适应的原则,将视错觉标线和韵律感曲线相结合,诱导车辆提前减速,使隧道运营安全水平得到了提高。另外还有国内的学者[7-9]研究了驾驶员在行车过程中控制车速或调整跟车间距时边缘标线的影响模型,模型验证了能显著影响车头时距和车速的主要因素是边缘率标线的时间频率、铺设角度等因素。
但目前的研究都停留在静态边缘率的层面,其对所有的车辆均采取同一控速方案,针对性较低。
鉴于此,本文以现阶段的静态边缘率算法模型,设计系统内部控制逻辑图,构建动态边缘率控制系统,使控速系统更具针对性,提高隧道运营安全。同时还设置静态边缘率对比实验,分析动态边缘率的降速效果。
1 适用性分析
边缘率的研究主要集中在高速公路,现阶段对于隧道内的边缘率研究较少,鉴于隧道内的环境与高速公路环境存在着差异,其亮度不足、有害物质浓度高、噪声大、能见度小、压迫感强、景色单一。研究表明,一定浓度的有害物质会对驾驶员的身体健康造成一定程度的损害,甚至使得驾驶员反应迟钝,影响驾驶员行车安全;过大的噪声会导致驾驶员烦躁不安、专注力下降,应急反应能力下降;隧道内强烈的压迫感以及单一的景色会使驾驶员下意识加速。因此有必要分析在隧道内应用边缘率标线的适用性。
边缘率指的是在单位时间内路缘间隔标志物穿过驾驶员视野边缘的数量,在边缘率周期已知的情况下,驾驶员就可以通过边缘率来对行驶速度进行一个主观感知。如果边缘率增大,那么驾驶员的感知速度也就随之增大。
边缘率的定义公式如公式(1)所示:
f=v/λ
(1)
式中:v为速度,m/s;λ为边缘率周期长度,m;f为边缘率,Hz。
边缘率的改变主要是时空频率的改变,Shen[10]通过实验发现并验证了感知速度与时空频率的函数关系,如式(2)所示,由式(2)可知时空频率与主观感知速度和物理速度都有联系。
(2)
式中:Vp为感知速度,m/s;V为物理速度,m/s;ft为时间频率,Hz;fs为空间频率,cycles/s;n为拟合参数。
在行驶过程中,物理速度一定时,时空频率越大,驾驶员在单位时间内看到的路缘标志物就越多。单位时间内驾驶员视野边缘里通过的路缘标志物越多,驾驶员感知到的速度就越大,导致高估车速。
由此可知,边缘率正好利用驾驶员感受到时空频率改变获取的视觉信息来高估实际车速,从而让驾驶员下意识做出踩刹车的驾驶行为,达到降速的效果,提高隧道行车安全。但鉴于隧道内环境特点,利用普通的路面边缘标线的控速效果不佳。而且本次的控速方式为动态边缘率控制,因此考虑使用LED灯来达成动态边缘率效果。选取白色作为LED灯的颜色,与其他颜色相比白色能够提供更亮的照明效果,除此之外还能够有效减轻驾驶员的眼部疲劳,使驾驶员更专注于驾驶,另外白色的辨认效果较好[11],因此LED灯的颜色选用白色,其亮暗比为1∶1。
2 边缘率LED灯动态控速系统构建
2.1 系统组成
边缘率LED灯控速系统包含测速仪、配电箱、LED灯控制终端、车速控制终端、第一无线数据传输模块、第二无线数据传输模块、边缘率LED灯灯设备,该系统如图1所示。

图1 基于动态边缘率的LED灯控速系统
2.1.1 测速仪
测速仪,如图2所示,分为测速仪Ⅰ和测速仪Ⅱ,分别安装于系统的开端和末端。测速仪Ⅰ被用来记录起点车速;测速仪Ⅱ被用来记录终点车速。通过对比起点车速和终点车速的参数,判断驾驶员是否受系统影响采取了一定的减速行为,从而检验边缘率LED灯的动态控速效果如何。

图2 测速仪
2.1.2 车速控制终端
车速控制终端用于存储边缘率LED灯控制方案,它被安装于边缘率LED灯和测速仪之间,
2.1.3 无线通信模块
无线通信模块用于将LED灯控制方案无线传输至LED灯控制终端。
2.1.4 LED灯控制终端
LED灯控制终端用于接收方案并产生灯控信号,并将信号传输至边缘率LED灯。
2.2 控速系统构建
2.2.1 速度采集
考虑到隧道路段环境的特殊性,为了避免对隧道内车辆的正常运行造成影响,保证采集的车速数据的有效性,同时保证采集者的人身安全,选用NC-200地磁型交通流检测器作为隧道路段内车速采集设备。同时采用雷达枪对车速数据进行随机采样,与检测器结果进行对比,若车速数据的差距过于显著,则重新采集直到数据样本有效,车速采集设备如图3所示。

图3 NC-200地磁型交通流检测器和雷达枪
车速数据采集时段为白天,车速数据采集交通流条件为自由流交通。
2.2.2 动态控速方案
通过速度采集设备采集到的车速以及系统铺设路段的限速值,确定最高车速vmax,减速目标车速vt。即控速样本对象为车速处于[vt,vmax]内的超速车辆。以区间长度Δv为单位,对超速区间进行划分,从减速目标车速vt开始,每隔Δv划分一个控速区间,速度区间为[vt,vt+Δv]、[vt+Δv,vt+2Δv]…,则第m个控速区间为[vt+(m-1)Δv,vt+mΔv],r∈[1,M],其中M为(vmax-vt)/Δv,为控速区间数量,取整值。剩余的车速区间[vt+MΔv,vmax]将被合并至第M个控速区间作为一个控速区间。由于采集速度的局限性,系统铺设后最高车速可能高于vmax,但数量较少,因此将其合并至第M个控速区间作为一个控速区间。按照图4所示的流程计算每个速度区间的周期长度值和铺设总长度,可将系统控制方案简化为表1所示M+1种模式。

图4 动态控制方案算法框架

表1 动态系统控制方案
2.2.3 系统电路控制方案
边缘率动态控制系统内部的控制逻辑图如图5所示,由测速仪Ⅰ测出进入系统车辆的车速,与表1中的速度划分区间进行对比,得出m,再通过LED灯控速终端中的内置MATLAB控制程序,控制单刀多掷开关和多到多掷开关都接至m挡,此时该电路控制就会输出Lm和λm/2,从而使LED灯处于模式m,对系统内的车辆进行有针对性的控速。其中每个控制器的主要是控制LED灯的输出长度,根据表1中的模式进行计算,确保每一个挡输出的是该模式下的铺设总长度和周期长度。
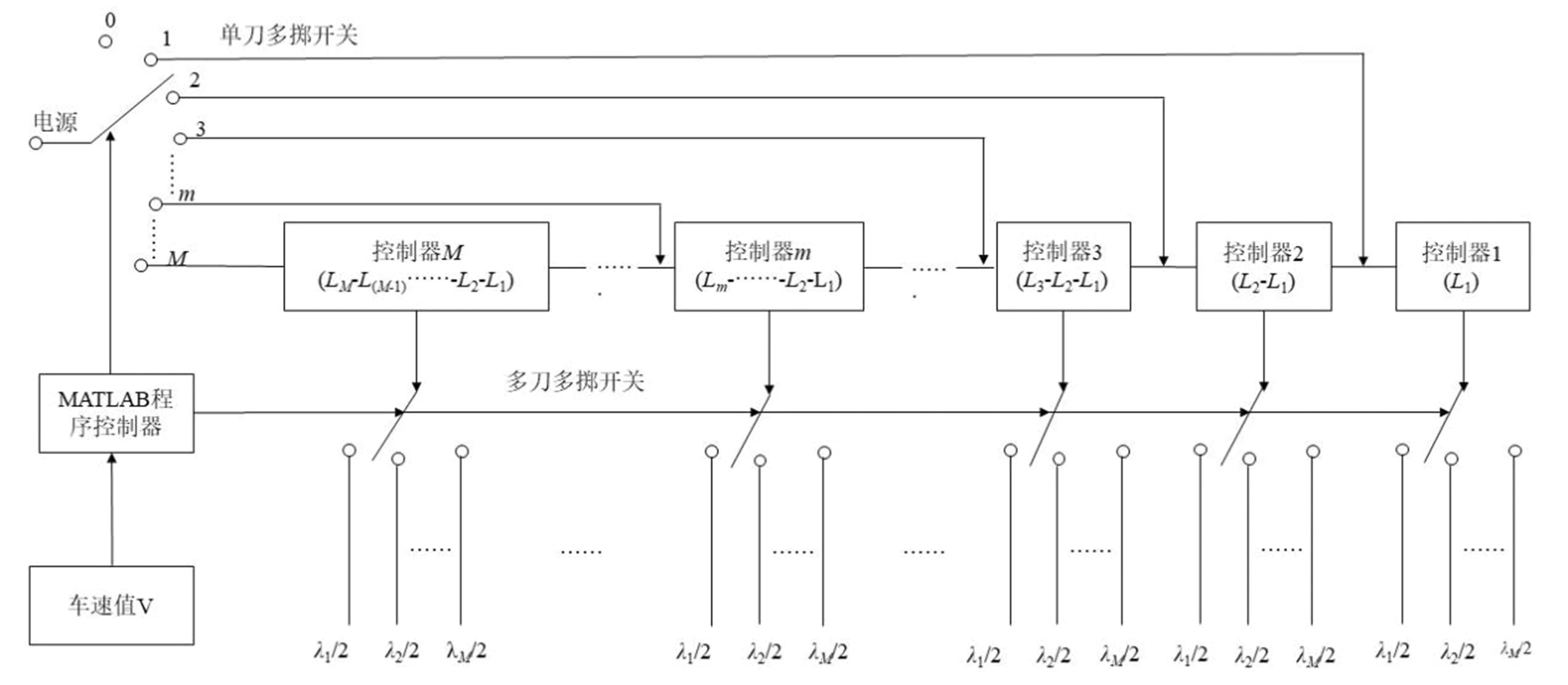
图5 内部控制逻辑图
3 效果分析
为了验证边缘率LED动态控制系统,选取二郎山隧道安装该系统,隧道全长13.4 km,设计速度和限速值都为80 km/h。通过两种速度采集装置采集到的车速确定最高车速为105 km/h,减速目标车速75 km/h。经过图4所示的流程计算,M取3共计4种模式及每种模式对应的周期长度值和铺设总长度,见表2。

表2 动态系统控制方案(隧道两侧模式相同)
由表2可知,安装在二郎山的动态控制系统中各模式的L和λ存在重复,因此可将电路控制逻辑图简化,如图6所示。
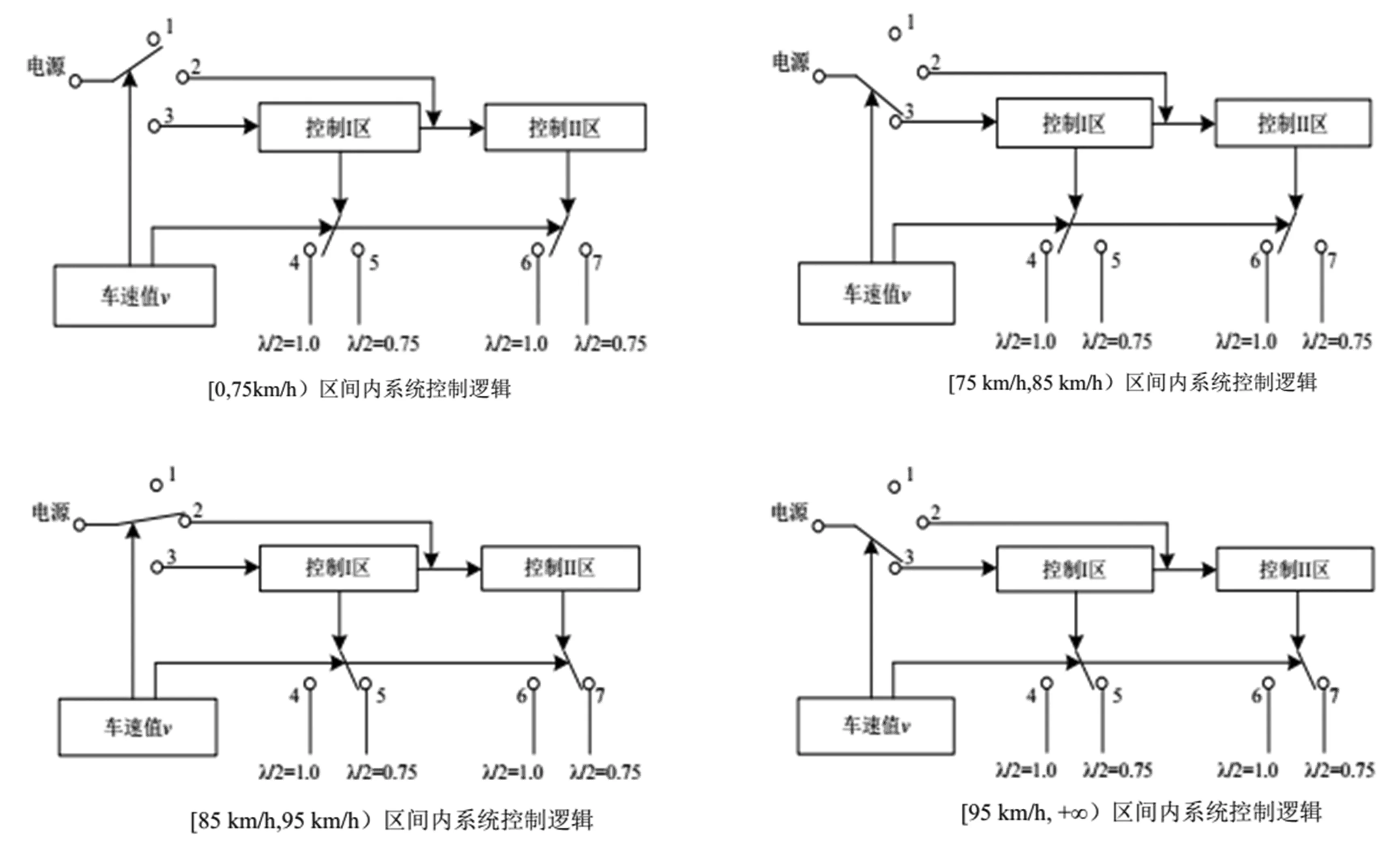
图6 二郎山控制逻辑图
将边缘率LED灯动态控制系统安装后,在二郎山隧道安装系统并进行调试,现场如图7所示。边缘率LED灯动态控速系统的布设完成后,车辆运行状态下边缘率现场效果如图8所示。
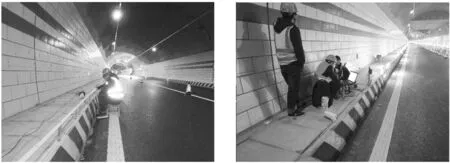
图7 实地安装与系统调试

图8 车辆运动状态下边缘率
系统安装试运行一段时间后,收集了一天的车速数据,且数据符合正态分布。分析处理得到安装前后的平均速度、速度标准差和各区间速度比例,结果如图9所示。由图9可以看出控速系统效果明显,途径车辆的速度明显发生了降低,驾驶员采取了一定的减速行为,平均车速和车速标准差分别下降了7.96%和13.45%。

图9 安装边缘率LED灯动态控速系统前后的车速指标对比
为了验证动态边缘率控速系统的效果,设计了6组静态对比实验,见表3,通过MATLAB编程控制隧道两侧处于不同的模式,并且该模式不随进入车辆的速度发生改变。
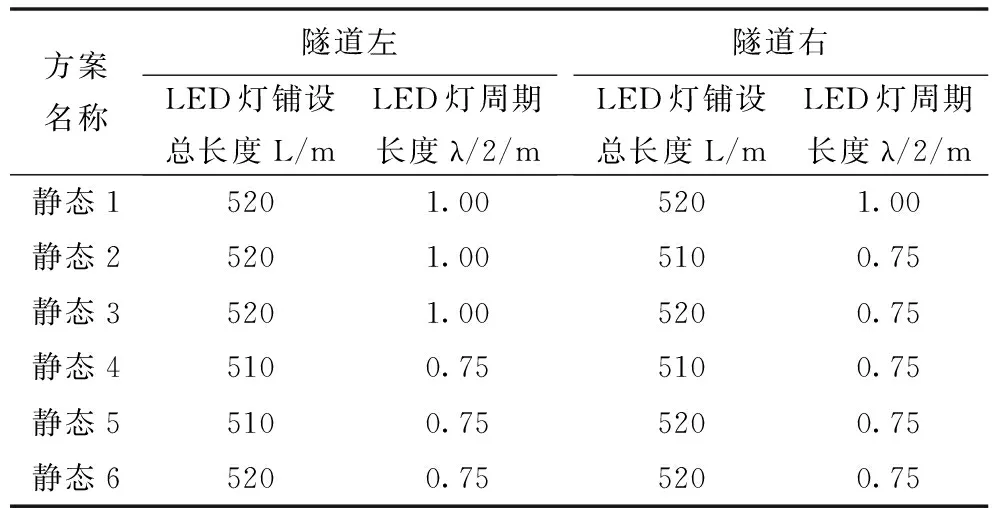
表3 6组静态对比方案
利用车速控制终端内的MATLAB程序,控制LED灯按照静态设计方案实行亮暗,每种静态方案采集半天实验数据,对数据进行处理,其结果如表4。由于二郎山隧道通车不久,其交通量较低,刘莹莹等[12]的研究认为该路段车流处于稳定时其不同密度车速标准差介于5~15 km/h范围。由表4发现动态方案和静态6组方案的标准差都处于稳定的范围,因此在车流处于稳定的前提下,仅考虑平均车速,发现动态边缘率对平均车速的降低值最大,认为动态边缘率降速效果更佳。
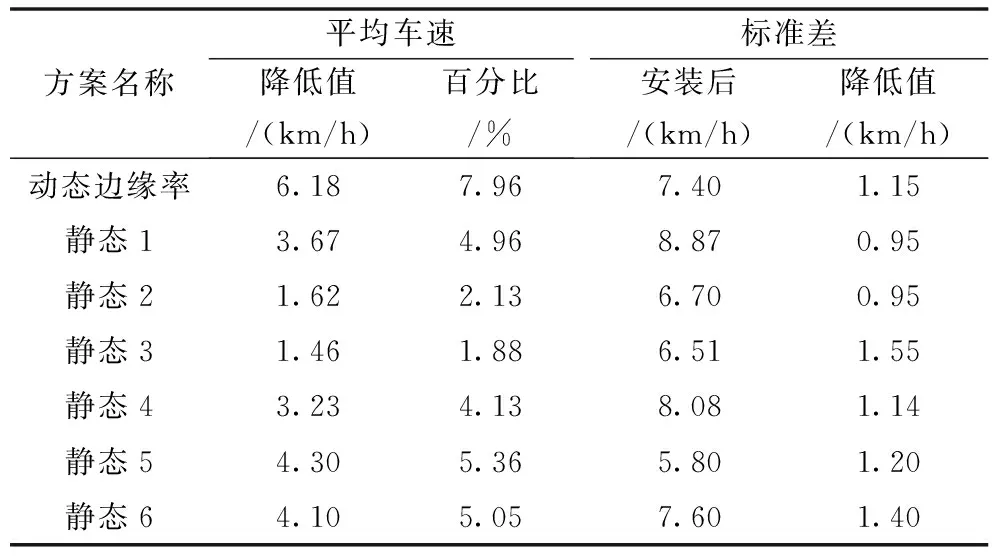
表4 六种静态对比方案与动态边缘率效果对比
4 结 论
(1) 本文为改进静态边缘率控速针对性的不足,提出了动态边缘率控速系统框架,并设计系统内部控制逻辑图,以平均车速和车速标准差作为降速目标,构建了针对性更强的动态边缘率控制系统。
(2) 为验证该动态系统的有效性,在二郎山隧道进行实地安装,经统计分析发现该动态系统安装后能进行有效控速。
(3) 针对动态系统设置了6组静态对比实验,发现在车流处于稳定的前提下,动态边缘率系统较静态边缘率模型能更具针对性地进行控速。
论文构建的内部控制系统主要是逻辑层面,内部的电路及现场铺设的复杂性有待进一步研究。