基于分层格网点密度法的车载LiDAR点云单株树信息提取及精度分析
2021-10-20王田发孔巧丽李长松张令纲方文豪
王田发 孔巧丽 李长松 张令纲 方文豪
(山东科技大学 测绘与空间信息学院, 山东 青岛 266500)
0 引言
传统的人工测量方法是过去获取城区中行道树信息的主要途径,但是此方法测量效率低、精度差。随着三维激光扫描技术的发展,车载激光扫描系统担任了获取城区行道树信息的重要任务。车载LiDAR系统凭借采集数据自动化程度高、速度快、精度高、可进行三维可视化等特点,应用在行道树信息的提取上节省了大量的人力和物力。文献[1]提出了一种基于知识的方法,在激光点云数据中直接提取属于特定地物的目标点,该方法能够有效地提取单株树点云,但在复杂的环境中提取精度受到了一定的限制。文献[2]针对车载LiDAR数据的分类和提取,提出了一种点云特征图像的生成方法,但是此方法对单株树的提取精度较低。文献[3]提出了一种以聚类的杆状地物为基础的提取方法,利用八邻域搜索对地物点进行聚类,再通过各类地物的特征,对其他地物点逐步排查,精细提取杆状地物。文献[4-5]通过联合二维和三维格网,提出了一种基于水平截面法的树木点云提取方法。文献[6]通过均值聚类和曲线拟合算法提出了一种单株树骨架的提取方法。文献[7]采用面向对象与叠加分析的方法,提出了一种分层投影的行道树提取方法。文献[8]结合目标物的空间结构特征,提出了一种分层获取目标物激光点云的方法。文献[9]结合行道树在分层格网中的形态特征、高程分布与投影密度提出了一种基于空间区域增长的行道树提取方法,此方法能有效地获取行道树的点云。文献[10]直接在建立好的空间投影格网上进行的点云分割,利用启发式搜索算法在激光点云数据中获得树干的精确位置信息,并通过区域竞争算法正确区分了树冠。文献[11]利用随机森林建立预测模型,并将点云进行分类处理,采用基于密度的聚类算法来提取单株树,并以单株树为数据处理的最小单元获取树的属性信息。本文对分层格网点密度法进行研究,分析了算法中各参数对行道树提取结果精度的影响。此方法可以根据被提取地物的实际形态,合理地调整格网的参数(格网大小、格网高度),灵活地设置格网阈值,进而更加有效地提取目标物的点云数据。
1 车载LiDAR技术理论
1.1 车载LiDAR系统的特点
车载激光探测及测距系统(Light Detection and Ranging,LiDAR)系统也叫作MLS(Mobile LiDAR System),是一种以汽车为载体快速获得道路两侧地物属性信息和位置的信息采集系统,它是将激光扫描系统、电荷耦合元件(Charge-coupled Device,CCD)相机、定位定姿系统(Position and Orientation System,POS)、控制系统高度集成,然后固定在车顶上,随着车辆的移动,扫描仪可以获取周围360°空间的三维信息,并且相比于机载三维激光扫描系统,车载系统可以近距离获取地物的信息。车载LiDAR系统凭借自身的各种优越性越来越普遍地应用于道路、人文地理、环境科学等领域。简而言之,车载LiDAR系统具有采集数据自动化程度高、速度快、精度高、可进行三维可视化、非接触测量、成图独立、获取的信息量丰富等优点。
但是由于扫描仪安装在车顶,车载平台高度一定,加上激光扫描仪的射程有限,从而导致较高地物的顶部信息无法获得;并且系统以汽车为载体,扫描精度受到道路质量的影响。同时车载三维激光扫描系统获得的高精度的密集的数据会因为数据量过大,不方便数据后期的处理与管理。
1.2 车载LiDAR系统数据获取过程
车载LiDAR系统工作时,首先需要建立全球定位系统(Global Positioning System,GPS)基准站,然后对传感器进行时间的同步、对数据进行空间配准,将GPS与惯性导航系统(Inertial Navigation System,INS)系统进行组合来获取扫描车的行驶运动路线和实时姿态信息,最后完成对点云数据的采集,以及利用CCD相机进行获取数据。具体流程图如图1所示。
2 行道树点云提取流程
2.1 分层格网点密度法提取行道树流程
由于不同地物具有不同的形态特征,所以地物表面的三维信息不同,在地物的不同高度处所得到的激光点也不同,在高程较低的近地面处,行道树所获得的激光点比较少,在高程值较大的树冠处,就会获得较多的激光点。因此,我们可以将所得到的激光点云进行分层,研究目标对象在不同的高度范围内所包含的激光点,处理流程如图2所示。

图2 分层格网点密度法实现流程
2.2 单株行道树的识别
2.2.1规则网格的建立
首先研究水平面上点云投影的范围,根据实际范围的大小建立一个对于各层网格都实用的网格标准,使得各层之间对应位置的网格大小相等且具有相同的行号和列号。建立网格时,可以根据实地情况和具体需要建立三维坐标系。
2.2.2点云分层处理
点云分层一般都是根据高程对点云进行平均分层,在获取点云中的最大高程和最小高程之后,根据其差值平均分为n层,对每层点云赋予不同的标记。但此方法针对复杂的大场景点云寻找高程的最值是不可取的,需要根据实测地区的地形情况和所需提取研究的特定地物的实际情况进行点云的分层。
2.2.3逐层计算网格点密度
对点云数据建立标准化网格和点云分层之后,需要计算各个网格的投影点密度。首先将激光点云垂直投影到对应层的水平面上,逐层统计各个网格内所含有的点数。
2.2.4逐层提取激光点
由于各层对应的网格标准是相同的,针对某一地物,可以分析其在各层中的邻域关系。以单株树为例,树的三维形态是连续的,激光点云的分布也是连续的,所以在对其投影后,上下两层相邻网格中,投影点密度不为0的网格必定是相同行列号的。
提取单株树激光点的具体步骤如下:
(1)受近地面地物(如树下低矮灌木丛、路上的行人等)的影响,通过对第二层网格进行研究来确定树的主干位置。首先设定一定的网格阈值,进入第二层网格,查找网格点密度大于阈值的网格,并记录满足条件的网格的行号和列号。由于格网大小不同,树木的粗细程度也不同,有些树木的激光点的投影可能不仅仅局限在一个网格中,所以设立的网格阈值不应该太大,对于某个网格或其邻域也大于阈值的网格进行分组标记,表示对不同的树进行不同的标记,如对各组激光点分别标记Treex,表示组成X编号的树的一部分激光点。
(2)由上到下对第一层的网格进行搜索,只查找与第二层被标记行列号相同的网格,直接为对应的激光点标记对应的属性。
(3)由下到上进入第三层,在第三层网格中查找与上一层被标记行列号相同的网格,先剔除投影点密度为0的网格,剩下的网格判断其点密度是否满足阈值,若满足则对应标记,然后对该层中被标记的网格的八邻域网格进行搜索,点密度满足条件的也要加入对应的分组。最后,在本层中再以标记过的所有网格为起始网格,对八邻域进行查找,满足阈值条件的加入分组,以此方法直到对本层所有格网分组归并完毕。
(4)当前层分组归并完成后,记录对应网格行列号,进入下一层用同样的方法对其操作,直到整个点云数据中所有网格查找完毕。
2.2.5提取单株树
所有网格处理完成后,在原始的点云数据中,按照需要输出被标记的点云,不同的树有不同的标记,可分别输出。
3 基于分层格网点密度法提取单道树信息的精度分析
3.1 车载LiDAR点云数据介绍
本文利用Microsoft Visual Studio 软件以及CloudCompare软件对点云数据进行提取、显示和精度分析。所采用的激光点云数据是位于山东省青岛市黄岛区辛安街道前港路的部分点云数据,在此点云中,主要包括六棵完整的树、一根路灯、树下低矮灌木丛、马路中间的中央隔离护栏以及地面的点云。点云总数约170 000个,最大高差约12.5 m,如图3所示。

图3 车载激光点云预处理数据
3.2 各参数对点云提取的精度分析
本文通过改变格网阈值并采用控制变量法对分层格网点密度算法中出现的参数(格网大小,格网高度)进行分析,并在综合考虑各影响因素下,分析了中央护栏和杆状地物对单株树提取结果精度的影响。
3.2.1格网大小对点云信息提取的影响
格网大小的不同会对提取精度产生影响。现在在点云图像中单独对一棵树进行提取研究,点云的原图像如图4(a)所示,其中总点数为10 872个,树高约10.4 m,树下低矮灌木高约0.85 m。设置格网高度(即格网Z方向长度)为1 m,中心格网阈值为5,八邻域阈值为2,仅改变格网大小来研究格网宽度对点云提取的精度影响。图4(b)~(e)是格网大小分别设置为1 m×1 m,0.50 m×0.50 m,0.30 m×0.30 m,0.25 m×0.25 m时,提取的单株树点云图像。
根据图像可以看出,格网越精细,树下的灌木丛就越容易剔除。原因是当网格越小时较为邻近的点分布在不同的网格中,越容易区分,当格网比较大时,较为邻近的点有可能在同一网格中,不易区分。然而格网越精细,每一层中投影点密度就会越小,在已给定格网阈值的情况下,格网越小,小于阈值的格网也会增多,树冠点云被舍去的就越多,从而会出现图4的现象。
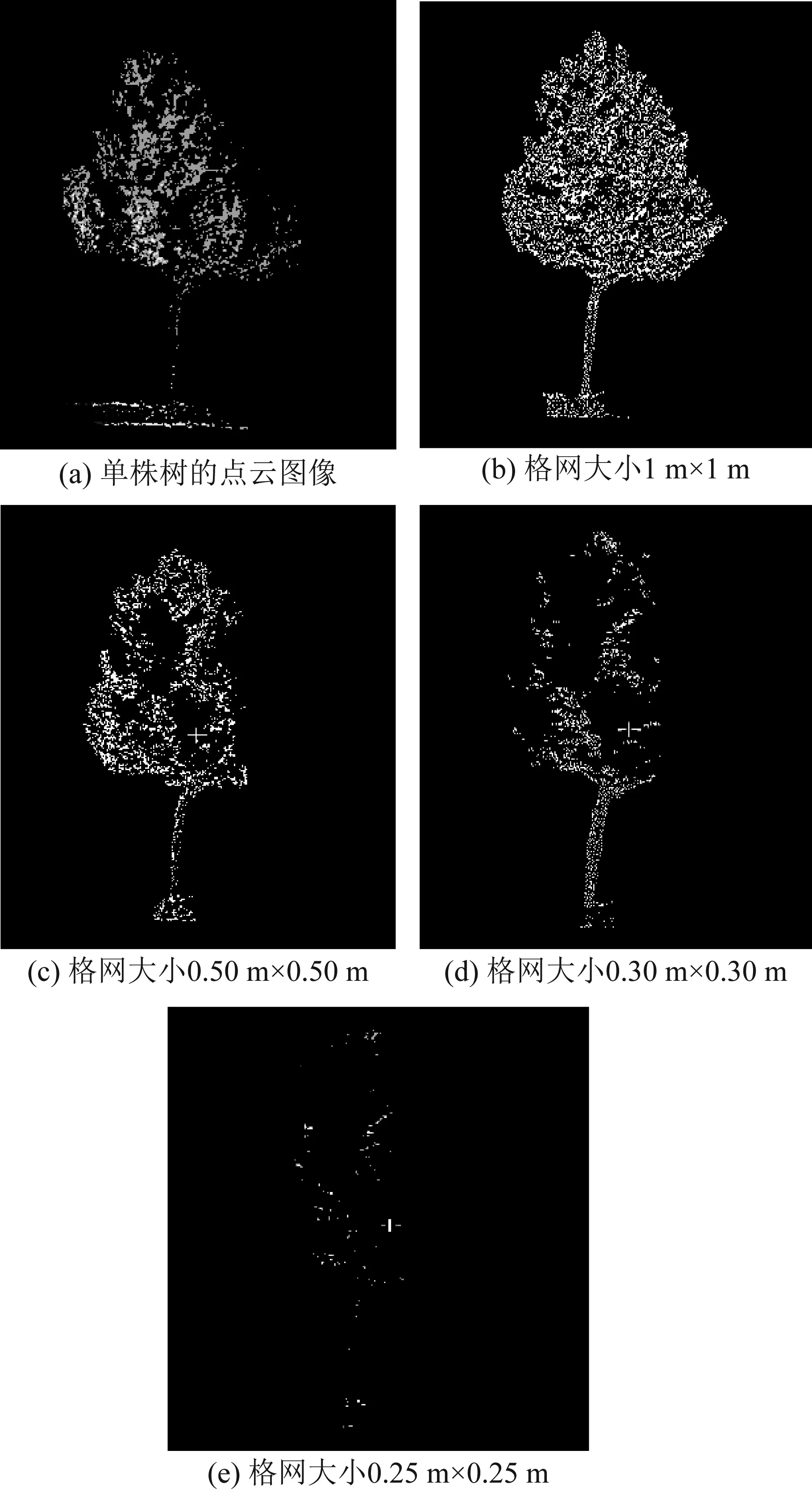
图4 不同格网大小提取的单株数点云图像
3.2.2格网高度对提取精度的影响
用控制变量法,只研究格网单层的高度对点云提取的影响。设计的各个固定参数分别为:格网宽度为0.3 m×0.3 m,中心格网的阈值为5,八邻域的阈值设为5,控制格网高度(即Z方向的宽度)在0.5~2.1 m之间变化。提取结果如图5所示。
从图5(a)~(e)树下的低矮灌木丛可以看出:选择格网高度时,应同时考虑地面低矮地物和树冠下部分枝叶的影响,尽量使第二层格网既不包含低矮地物的点云信息也不包含树冠下部枝叶的点云信息。同时由得到的点云图像可知,所研究区域的地形是西高东低的。
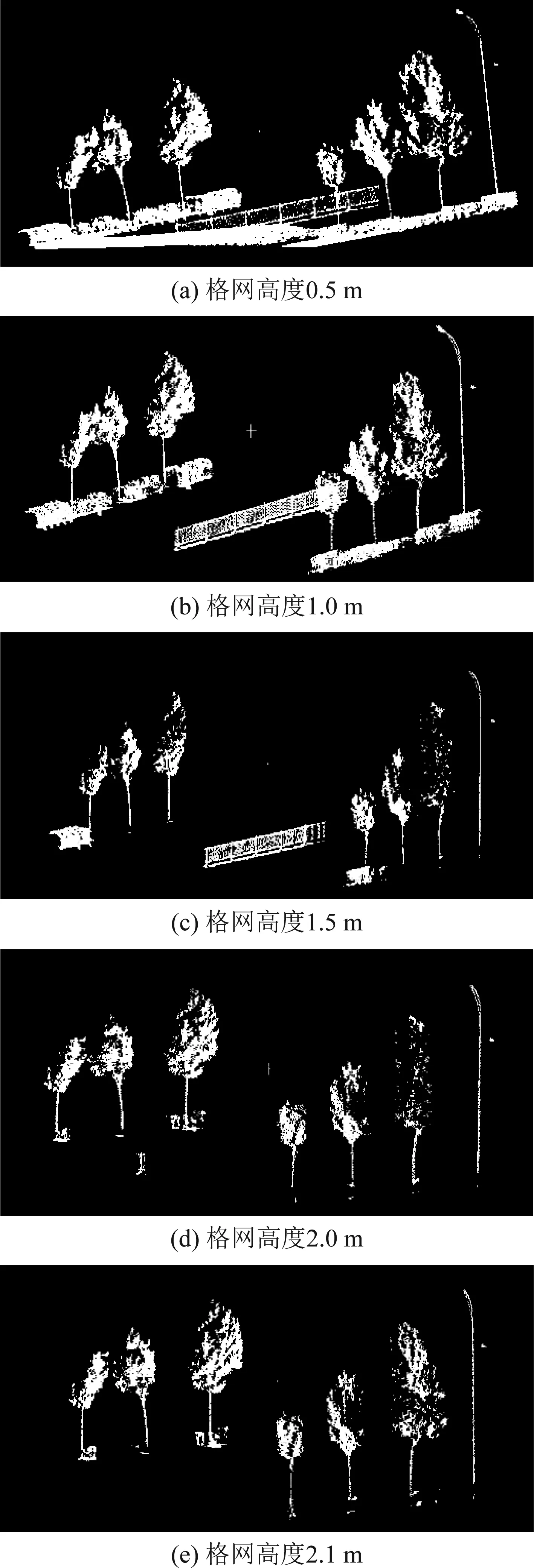
图5 不同格网高度提取的低矮灌木丛点云图像
3.2.3中央护栏的剔除
综合考虑3.2.2中所做的实验结果发现:随着格网高度的增加,马路中央护栏逐渐被剔除,然而某些树下灌木丛的点云又逐渐增多,这一现象主要是由地形起伏引起的,用CloudCompare软件进行分析,西侧(马路呈东西方向,图上左侧为西)地势比东侧高约0.75 m。因此,为了同时考虑对中央护栏和树下低矮灌木丛的剔除,需要对中心格网阈值和八邻域阈值参数进行设置,找到合理的阈值,进而来提高精度。现在设定格网大小为0.3 m×0.3 m,考虑地势高低的因素将格网高度设为1.8 m,八邻域阈值为2,用控制变量法,仅改变中心格网的阈值,处理结果如图6所示。

图6 格网大小0.3 m×0.3 m不同阈值的处理结果
由图6可以发现,单考虑提高格网高度来剔除中央护栏是不可取的,因为受地势高低的影响,灌木丛的点云无法剔除,此时应该选择合理的格网高度,借助中央护栏投影的特点,改变中心格网阈值来对其进行剔除。
3.2.4杆状地物对分层格网点密度法的影响
在此算法中,对每一层中满足阈值的格网,搜索其八邻域的网格点密度,对点密度大于阈值的网格进行标记和提取,删除点密度小于阈值的网格,故此算法会提取到电线杆、路灯等杆状地物。图7(a)是点云数据处理前的路灯的点云图像,设置格网的大小为0.3 m×0.3 m,格网高度2.0 m,中心格网的阈值为5,八邻域阈值为5,提取结果如图7(b)所示。
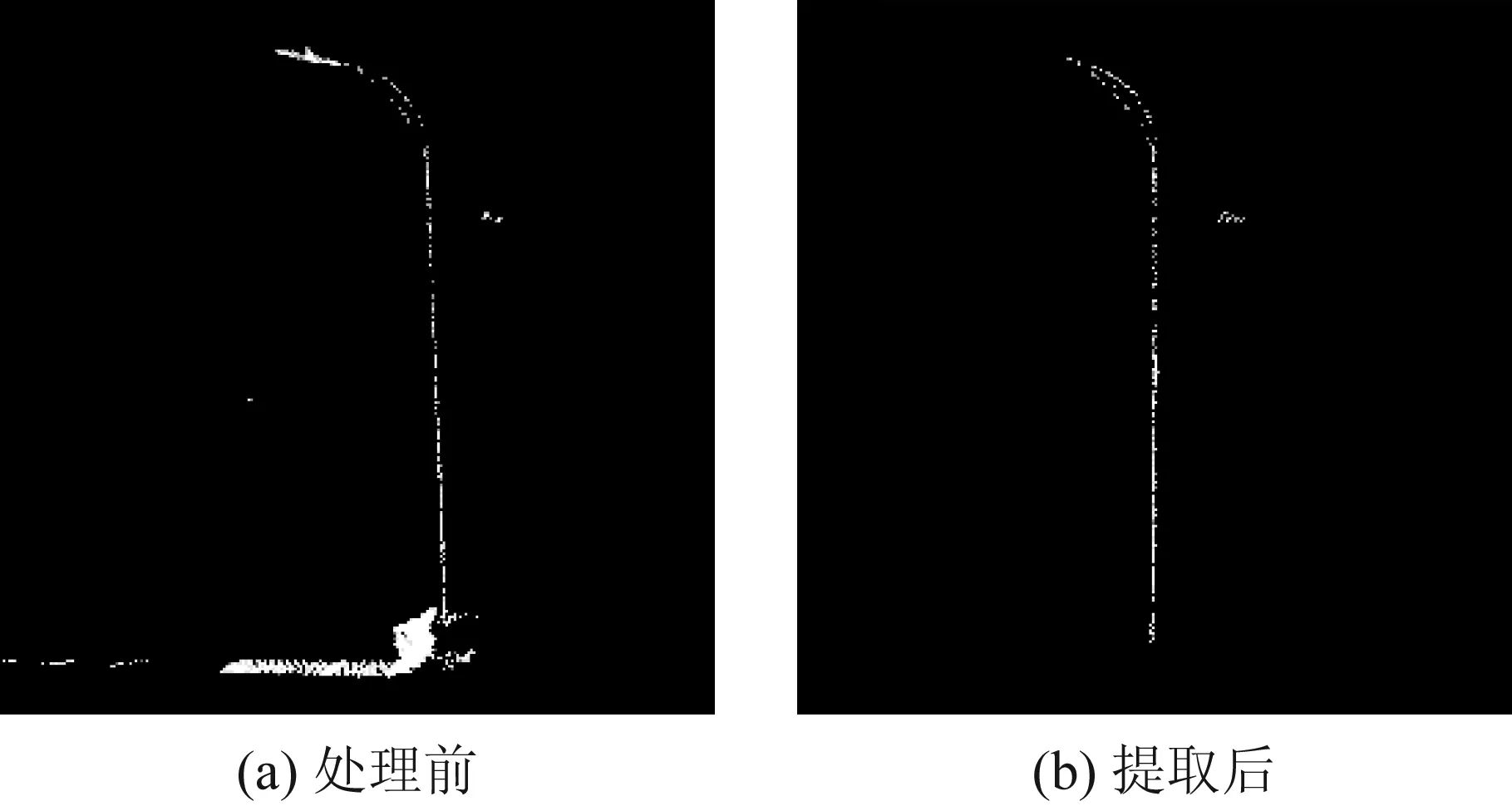
图7 路灯点云图像
提取过程中,因为树冠的形态各有异同,树叶的疏密程度也不同,暂时不能根据树冠部分与路灯等其他杆状地物形态的异同,对点云进行全自动的处理。因此,在算法中只保留满足条件的点云,提取出的点云中会包含一些杆状地物。需要在提取完之后进一步区分和排除。本实验考虑路灯与树的实际形态不同,将两者投影到二维网格上点云的形态也不同(图8),借助CloudCompare软件进行成图显示和去除路灯点云。

图8 二维投影图
4 结束语
本文基于分层格网点密度法采用CloudCompare软件对所研究的点云数据进行了详细分析。通过控制变量法,分别研究不同参数对提取结果的影响,为了使实验结果更加明显,用CloudCompare软件对所要研究的目标进行分割,并在Microsoft Visual Studio 平台上,不断改变格网大小、格网高度、中心格网阈值等参数,来分析各个参数对提取精度的影响。实验结果表明,基于分层格网点密度提取单株树的算法可有效地获取组成单株树的激光点。但在进行提取时要充分分析实地的地形情况,并且相邻两棵树的点云若有重合,将难以区分,路灯等与树木主干相似的杆状物体,也难以自动剔除。在今后的研究中,将会对杆状地物的自动排除、树木特征信息计算进行深入研究。