三维激光扫描技术在矿区道路沉陷监测中应用
2021-10-20陈年青李得军
陈年青 李得军
(1. 南京市测绘勘察研究院股份有限公司, 江苏 南京 210019; 2. 中国矿业大学 环境与测绘学院, 江苏 徐州 221116)
0 引言
煤矿资源的开采往往会引起采动区上方及周边范围内的岩体结构发生变化,进而引起地表下沉、倾斜、水平移动等各种变形,使公路路面发生异常现象,如裂缝、隆起、沉陷等。随着时间的推移而扩展,使得地表路面变得高低不平,不仅影响路面美观,还会增大交通事故发生的概率。变形监测则是获取采动区地表变形、破坏信息的主要手段,也为相关科学研究提供必要的科学数据。
目前,三维激光扫描技术已应用在采动区地表沉陷监测中,柏雯娟提出了一种矿山开采沉陷高精度监测方法,该方法不仅可快速获取矿区开采沉陷监测数据,而且可研究矿区开采沉陷规律[1];何荣等人以大柳塔矿某工作面地表三维激光扫描点云数据为基础,进行去噪处理,建立沉陷区三维数字高程模型,提出一种基于点云数据的地表倾斜量提取方法[2];孟万利等人提出了一种基于三维激光扫描技术的矿区沉降信息快速自动获取方法,该方法能够实现矿区地表形变的全面分析,从而快速自动地获取地表沉降信息[3];何倩等利用地面三维激光扫描点云数据构建高分辨率、高精度数字高程模型(Digital Elevation Model,DEM)监测矿区地表动态沉陷,实现了大范围、高精度、动态的地表沉降监测[4]。
矿产资源的大规模开采,带来经济效益的同时也给开采区域带来了一系列消极的影响。在开采作业过程中,岩体在开采区域移动并变形,形成了大规模的采空区,导致表面的大型沉降。其中,道路沉陷是地表沉降的主要形式之一。地面三维激光扫描仪作为一种新型测绘技术,可以大规模地对地表沉陷区进行监测,是对传统测量技术的一次重大突破[5-8]。实验介绍布设道路路面外业扫描方案以获取道路沉陷区三维点云数据,从而获取公路变形信息,通过在矿区进行实测研究,得出一些对工程实践有参考价值的结论。
1 沉陷监测方案
实验在煤矿附近S203省道进行,S203省道南北向自某矿上方通过,利用三维激光扫描仪对沉陷区域进行扫描,需要布设沉陷区道路路面三维激光扫描外业扫描方案获取道路沉陷区三维点云数据,并在其间布置水准控制点B19→B18→…→B0→25→26→…→41,点间距20 m左右,研究工作面开采对省道产生采动影响,同时验证三维激光扫描技术在矿区道路沉陷区监测应用的可行性。
该道路南北向自某矿上方通过,不在工作面主断面上,不能利用地表移动盆地角值参数直接计算该道路受开采影响的范围。故针对工作面开采对道路影响范围,采用概率积分法模型对其进行预计,沉陷预计参数见表1。
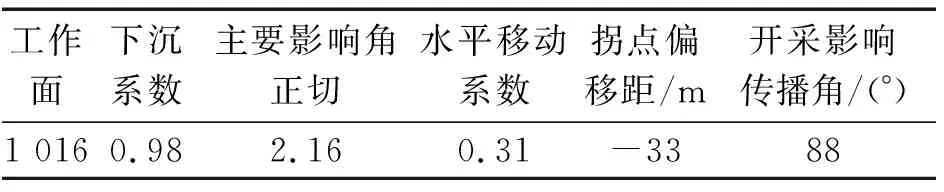
表1 工作面沉陷预计概率积分法模型参数
采用概率积分法模型预计结果表明,该工作面以北开采对道路沉陷影响长度为173 m左右,工作面以南开采对道路沉陷影响长度为221 m左右,对整个道路的沉陷影响长度为570 m左右。为了保证三维激光扫描仪站点的稳定性以及数据采集的准确性,控制点设在道路沉陷影响范围以外,由于首级控制点较远,所以需要布设对应的次级控制点以连接首级控制点和扫描站点,使用三等水准进行高程测量;将对应的控制点设计成图1所示,其中K是首级控制点,P是次级控制点,Z是对应三维激光扫描仪对应的站点。
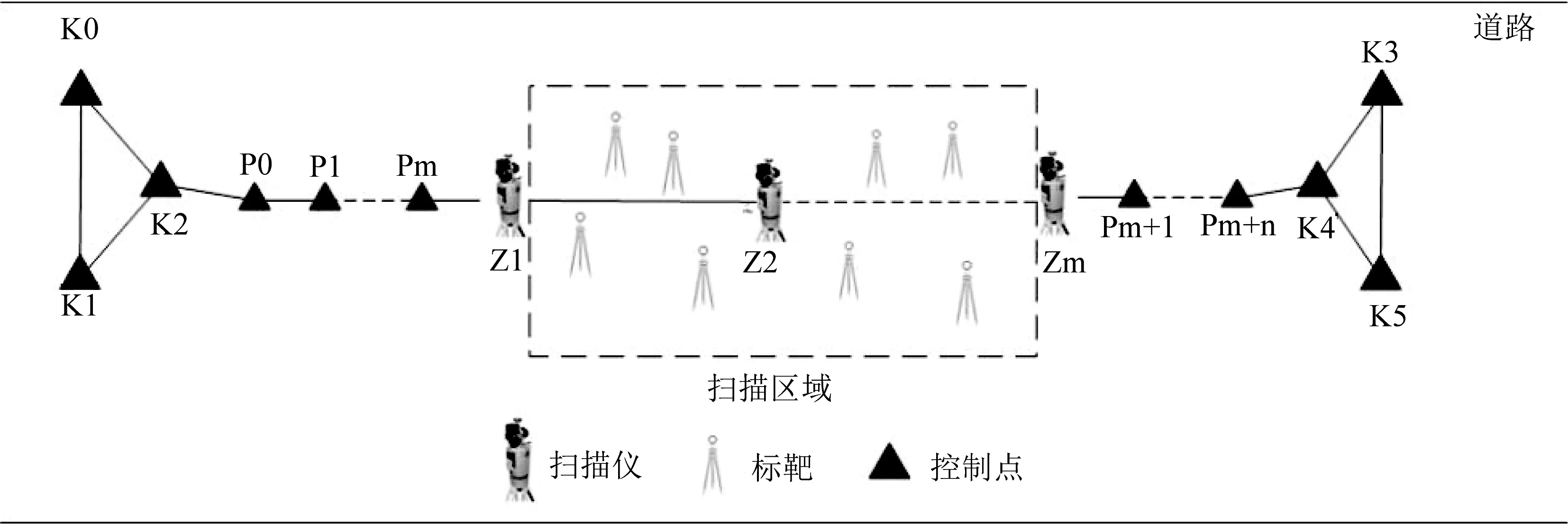
图1 控制网布设形式
采用RIGEL VZ-1000 全站式地面三维激光扫描仪获取道路点云数据,仪器需要架设多站对道路扫描观测[9-10],各参数设置如下:扫描最佳距离为40~60 m,密度设置在0.006 m左右;相邻测站之间距离为90 m左右,扫描仪距离标靶45 m,用平面标靶作为公共点拼接多站数据,拼接标靶为4个,布设成不同高度的不规则形状。
2 数据处理与分析
通过三维激光扫描仪采集的大量点云数据,可以构建地表沉陷区的表面模型,需要将扫描的各期点云数据与原始点云数据进行差值计算,得到下沉量[11-12]。由于各期数据点位同原始道路点位不同,因此,根据各期数据点位信息,利用插值得到对应在原始数据点位高程值;再进行差值运算即可得到对应点位的下沉信息;从而对下沉数据进行栅格化处理,即可获得道路的下沉模型。进行数据插值和栅格化处理的方式有很多,如克里金插值、反距离加权插值等。由于道路各点高程值以及下沉量均存在局部影响,且这种影响随着距离的增加而减弱。所以,实验采用反距离加权法。
以待求点为中心,设定影响范围R;将该影响范围内的所有点计入影响矩阵中,并计算各点距中心点的距离,用各点距离除以各点距中心距离之和作为该点对中心点的影响因子,中心点值为每个点对应影响因子乘以该点值之和。具体公式为
(1)
式中,i为待求点;j为待求点周围点;Wi,Wj代表对应点下沉值;hj为周围点距待求点距离值。
3 道路沉陷信息提取
3.1 路面点云预处理
三维激光扫描仪站点设置在控制点上进行扫描,首站采用后视定向,利用平面标靶作为公共点进行拼接,进行多站扫描得到整个道路状况,如图2所示;利用后处理软件RiSCAN PRO对数据进行一系列预处理操作,主要包括点云拼接,滤波、抽稀、分割等[13],从而提取研究区域内点云数据,得到预处理后道路扫描图如图3所示。

图2 道路扫描全局图

图3 预处理后道路扫描图
3.2 道路断面变形分析
通过后处理软件,在各期扫描点云数据建立DEM基础上,在沿道路纵断面的方向上选取一条剖面,将剖面上测点的步长设置为4 m,从而提取道路的纵断面的变形。道路数据采集日期分别为2018年5月6日、2018年8月10日、2018年9月16日、2018年10月14日、2018年11月2日、2018年11月24日,共六次。提取的公路纵向剖面线下沉曲线如图4所示,能够直观地观测出道路下沉情况,并能够在一定程度上反映出开采作业对道路的影响情况。
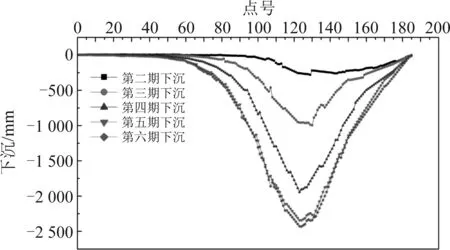
图4 道路纵断面下沉变形图
3.3 路面整体变形分析
将2018年10月14日三维激光扫描仪获取的数据进行分析如图5所示。
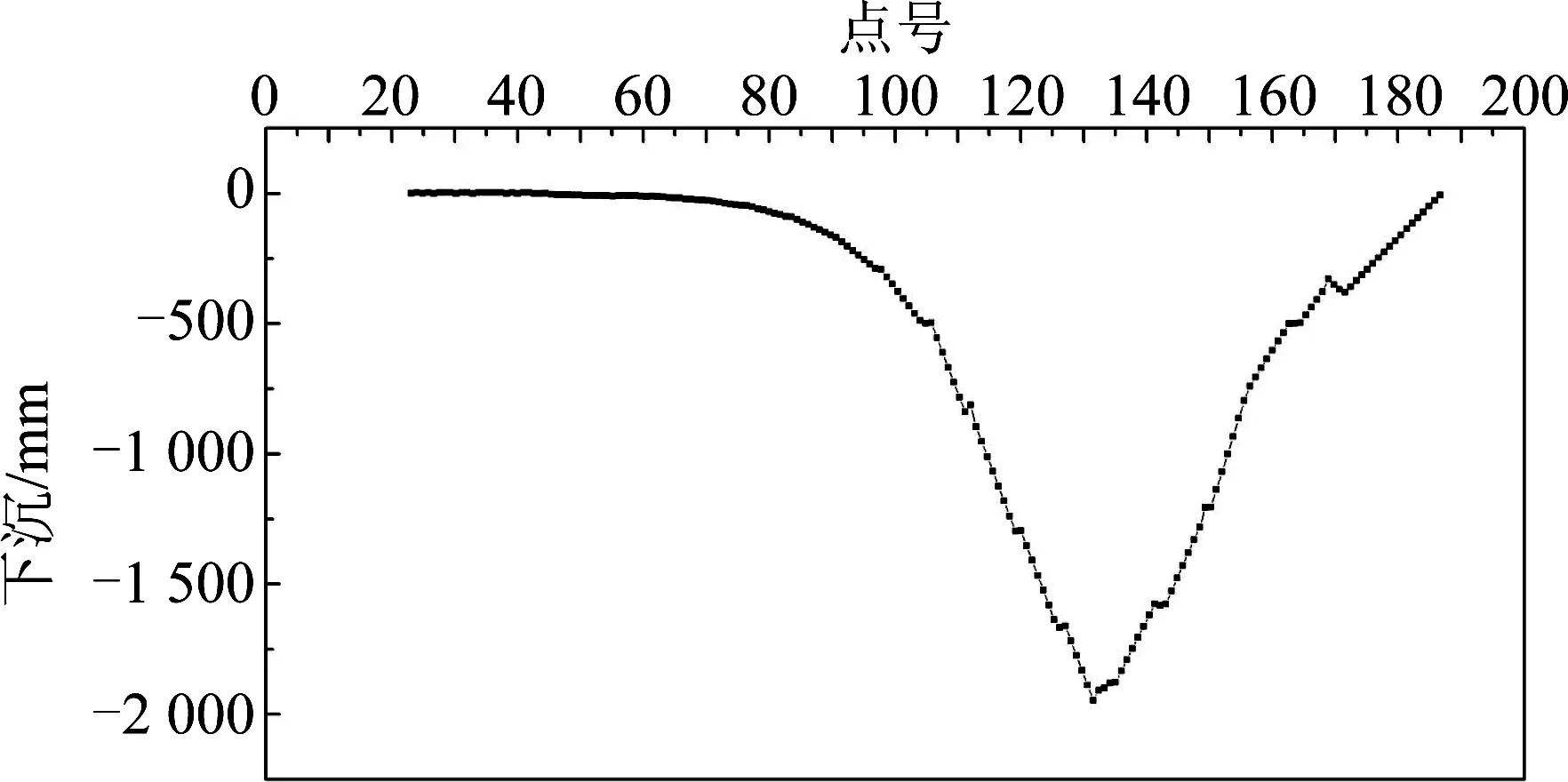
图5 三维激光扫描监测数据
从图5中可以看出,由于三维激光扫描仪获取点云数据庞大,在提取道路纵断线数据中可以看出局部不均匀沉降现象,所以有必要对整个道路路面的沉降信息进行分析。将道路点云数据导出三维坐标,进行网格化,根据网格格点坐标值,利用反距离加权计算出各格点的高程值,绘制道路的下沉云图,以第三期道路云图为例,如图6所示。

图6 道路点云图
各期点云图以5月6日的点云图为基础做差,得到两期数据间的高程变化量,以道路第三期下沉为例,绘制整体下沉云图如图7所示。
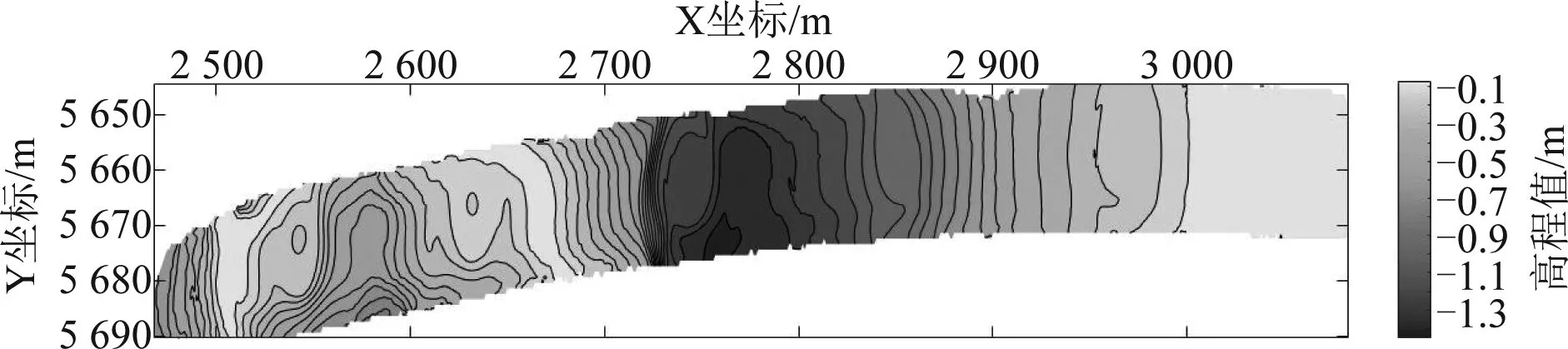
图7 路面下沉云图
从路面下沉云图中可以看出整个道路的沉降情况,能够直观地反映出开采作业对道路的影响情况,从而为道路监测提供依据。
4 与实测水准数据对比
水准点布设沿道路进行,以分析三维激光扫描数据进行插值求沉降的合理性,各期相对第一期数据下沉量,如图8所示。
从图8中可以看出该实测水准数据下沉曲线符合开采沉陷规律,采空区中心位于B0-B4观测点之间。将其中10月14号同期三维激光扫描的监测数据与实测水准数据进行比对,三维激光扫描监测点的高程取其周围点云的平均值,如图9所示。
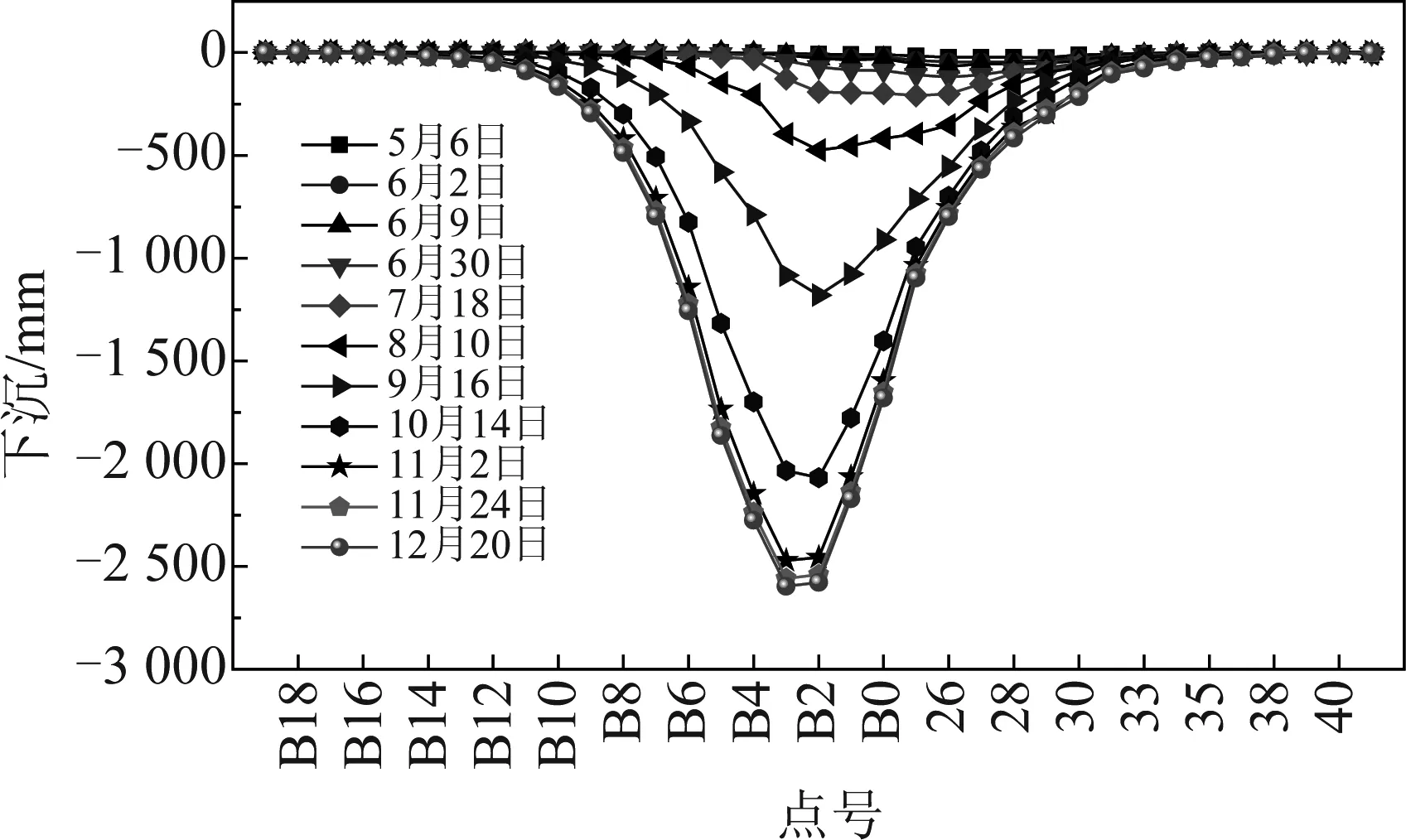
图8 实测水准数据
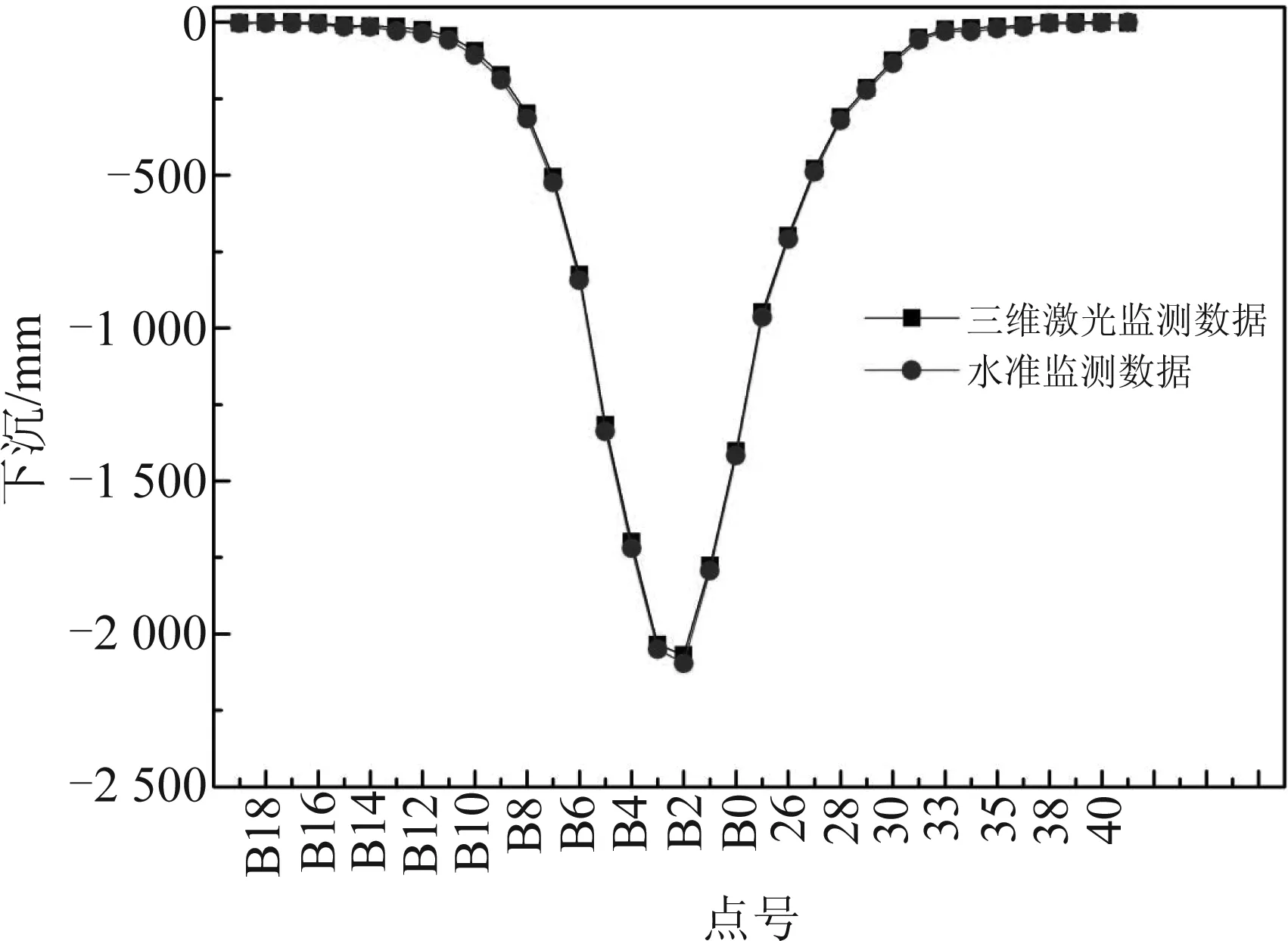
图9 10月14日监测数据比对
由图9可知,水准控制点下沉值和三维激光监测数据两者趋势基本一致;对比点云数据与水准数据下沉值如表2所示。可知对应水准控制点下沉值相差均在±1 cm;利用三维激光扫描数据绘制出的道路中线能够较好地反应下沉盆地。
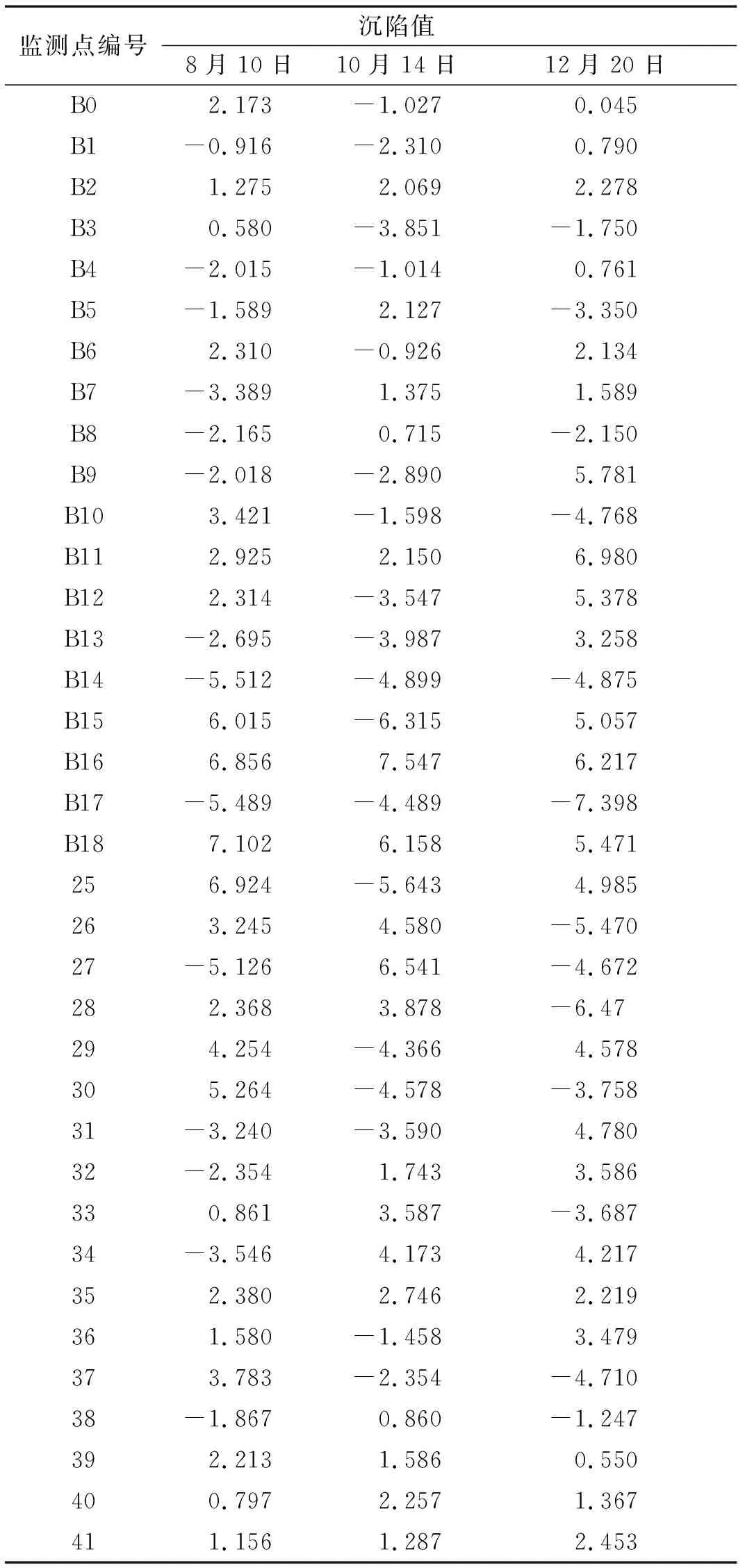
表2 点云监测结果与水准测量结果精度对比 单位:mm
5 结束语
实验提出一种三维激光扫描监测矿区道路沉陷的方法,可以快速获得海量数据,提取道路表面模型,能直观简洁地反映开采沉陷量及矿区的沉陷趋势。首先通过三维激光扫描仪获取路面点云数据,然后利用点位信息插值得到各期DEM数据,进行差值得到各点位下沉值,最后使用反距离加权法对下沉数据栅格化处理得到道路下沉模型。通过在某煤矿附近道路沉陷区进行实验验证,能够有效地反应道路下沉图,并选取了道路沉陷区若干有代表性的监测点的三维激光扫描开采沉陷监测值与对应的水准测量结果进行了对比分析,点位误差在1 cm以内,验证了该方法的可行性,对于进一步提高矿区开采沉陷监测效率有一定的借鉴价值。