基于单片机控制的电动自行车车速报警系统设计
2021-10-20洪腾腾靳轩轩武雪峥李雪颖
洪腾腾 靳轩轩 武雪峥 李雪颖
(黄河交通学院,河南 武陟 454950)
为加快实现“碳达峰,碳中和”目标,以绿色低碳,节能环保为发展理念的交通工具,更符合时代的主题。电动自行车、电动汽车等绿色交通工具具有重要的环保意义。在电动自行车生产过程中,须设置一个车速报警装置,这样可以让人们日常出行更加安全,当电动自行车速度过高时,通过可靠的速度检测系统,把危险的信号及时传递给驾驶人,警示驾驶人当前行驶车速过高,应当减速慢行,注意行车安全,从而可以避免因车速过高而给人们带来的财产损失和人身安全危害。
1 系统设计
本文设计的是一款基于单片机控制的电动自行车车速报警系统。该车速报警系统能够设定行驶的最大速度;能够实时显示电动车的行驶速度和里程,且具有超速报警的功能。该报警系统采用LCD1602 显示平均速度、瞬时速度、行驶里程以及通过键盘设置的最大速度(设定速度)。该报警系统工作时,通过单片机收集霍尔传感器采集到的脉冲信号,利用计数器记数、定时器记录时长,经单片机的分析计算,将行驶里程、平均速度、瞬时速度送给LCD 显示,如果当前速度超过设定速度,报警指示灯会亮起,蜂鸣器发出警报[1]。同时该系统能够根据4*4 矩阵键盘设定行驶的最大速度,当电动自行车行驶的瞬时速度大于或者等于预先设定的最大速度时,蜂鸣器会发出报警声音,报警指示灯亮起,以此来提示驾驶人当前速度过高,应当减速慢行,通过报警电路把速度过高的危险信号传递给驾驶人,警示驾驶人注意行车安全。
该系统框图如图1 所示。
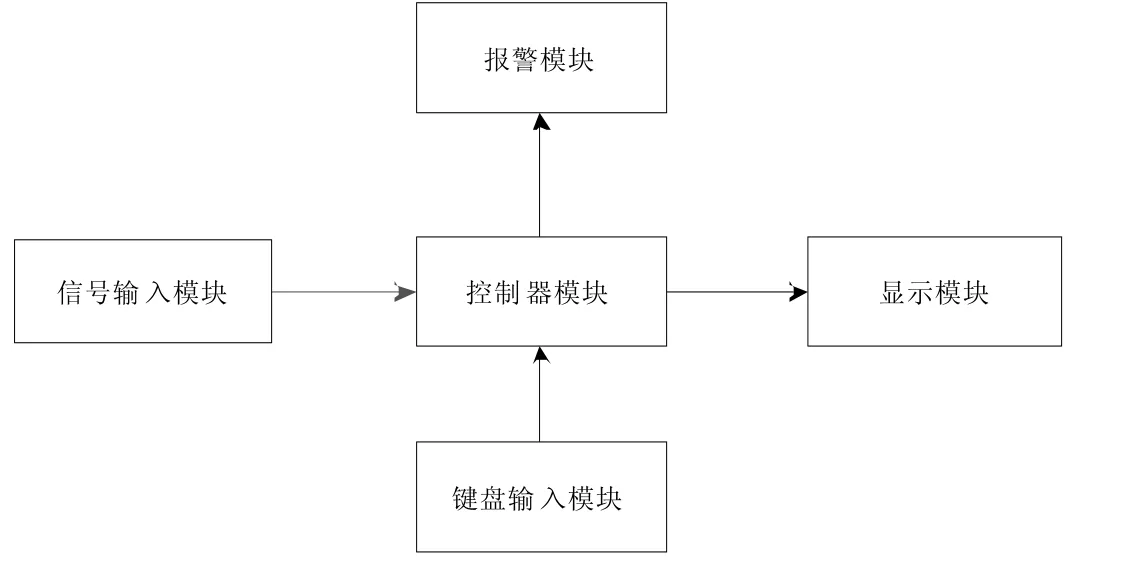
图1 系统框图
2 系统硬件设计
系统设计以STC89C52 单片机作为电动自行车车速报警系统的控制核心,采用霍尔传感器来检测外部输入信号[2],采集一定时间间隔内的脉冲信号,根据电动自行车自身车轮尺寸,经过STC89C52 单片机对采集的脉冲信号进行分析处理,最终在LCD1602 上面显示电动自行车的平均速度、瞬时速度、设定速度以及行驶里程,如果当电动自行车行驶的速度大于或者等于设定速度,该报警系统会发出报警警示(报警指示灯LED 亮起,蜂鸣器发出警示声音)。
2.1 测速模块
测速模块主要是由LM393 和3144 霍尔传感器高度集成的。它具有电源和信号指示灯,能够用来检查是否通电和是否有信号输入。该模块无触发时,输出高电平,有触发时,输出低电平。该模块稳定性强,准确度高,能够快速响应。LM393(电压比较器)能将霍尔传感器输出的波形直接转化成TTL 高低电平,单片机的外中断可直接对它进行计数。
2.1.1 测速原理
当电动自行车车轮中的磁铁经过霍尔传感器时,就会产生一个脉冲信号。单片机通过记录一定时间内的脉冲数量,根据电动自行车的车轮大小,可以计算出该段时间内的瞬时速度、行驶里程。通过对行驶里程的累加,时间基数的累加,可以计算出平均速度。霍尔传感器测量速度的示意图如图2 所示。
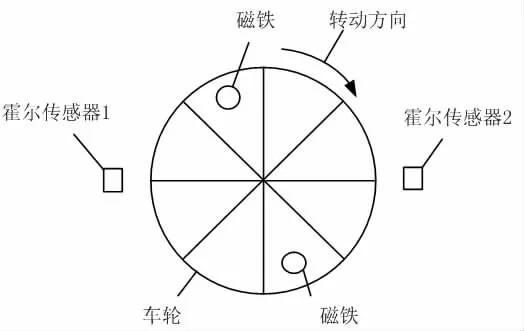
图2 测速示意图
2.1.2 速度和里程的计算方法

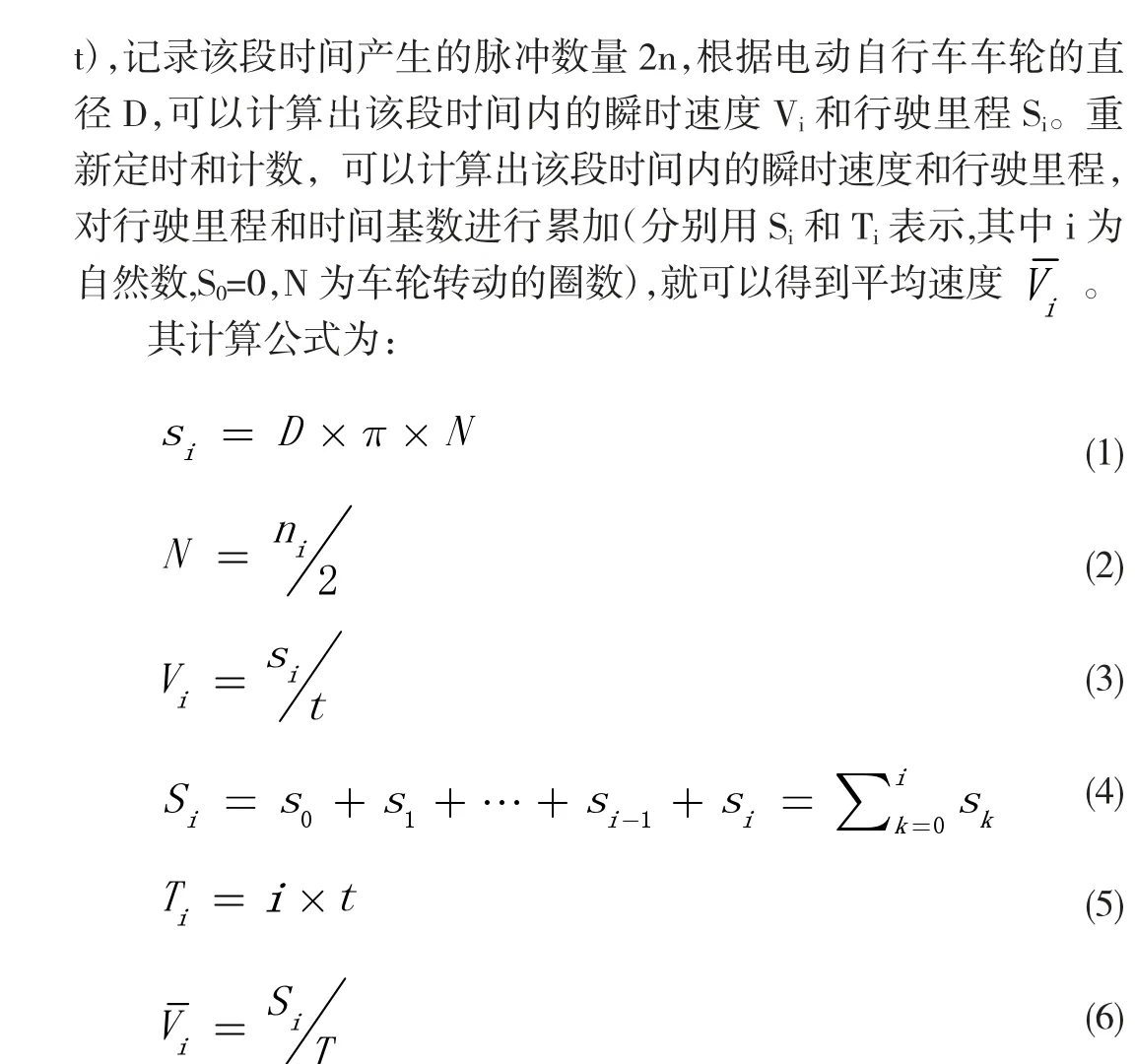
t 时间基数内记录脉冲数量如图3 所示。

图3 t 时间基数内记录脉冲数量
当两个霍尔传感器同时检测到第一个脉冲信号时,定时器开始定时,两个计数器重零开始计数,当定时到0.5s 之后,根据记录脉冲数量,计算出电动自行车转动的圈数,进而可以得到该段时间内行驶的速度以及里程。
2.2 报警电路设计
该报警装置是由蜂鸣器、电阻、PNP 以及发光二极管组成的[3]。当车速超过设定值时,单片机P2.7 为低电平,三极管导通,使蜂鸣器接通,发出滴滴长鸣声;LED 接通亮起。具体接线图如图4 所示。
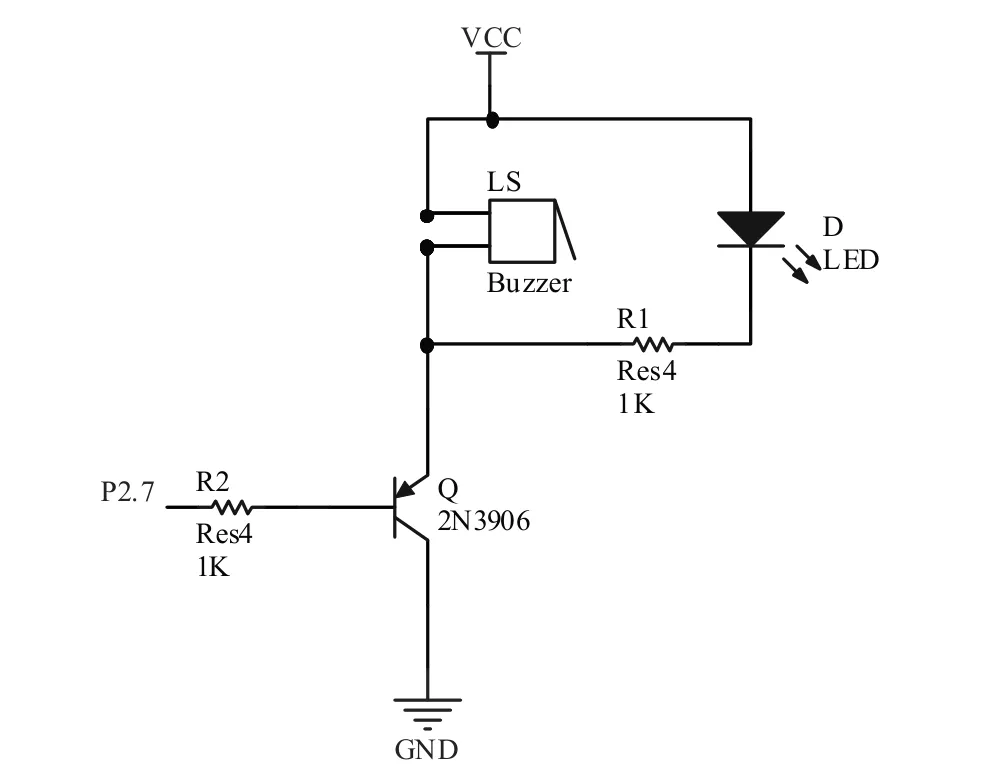
图4 报警电路图
3 系统软件设计
软件(程序)是硬件执行的“动力”,一个完整的设计系统软件和硬件必不可少的。本设计共有脉冲信号采集、键盘、报警、显示、控制器五大模块组成。并对这些模块进行编程,分别将编写好的程序输入到控制器模块(STC89C52 单片机)中,只有控制器模块有条不紊的执行程序,才能满足本次设计的需求。
3.1 系统主程序设计
本设计软件编程用的是Keil 软件,该软件广泛应用于学习和工作中。这个软件系统包括了C 编译器、宏汇编、连接器、库管理和仿真调试器等,功能非常齐全,该软件能够把高级的C语言转化成单片机能够是识别的低级语言,转化效率高,能帮助开发者理解相关程序的执行过程[4]。
本次设计主程序的顺序是:首先对单片机的各个引脚进行初始化,从键盘获取数据后,判断按键是否按下,如果按下,则判断按下的是否是数字,如果是数字并记录数字,如果不是数字,继续判断按下的是“确定”或者“取消”,如果是“确定”则获得设定速度,如果是“取消”则清除数字。然后定时器开始定时,外中断进行计数,定时时间到,计算出速度和里程,并比较速度大小,如果超速则报警,反之则不报警。最后将速度和里程信息送到LCD 显示,判断车轮是否转动,如果车轮转动则重新定时计数,如车轮停止转动则结束。系统主流程图如图5 所示。
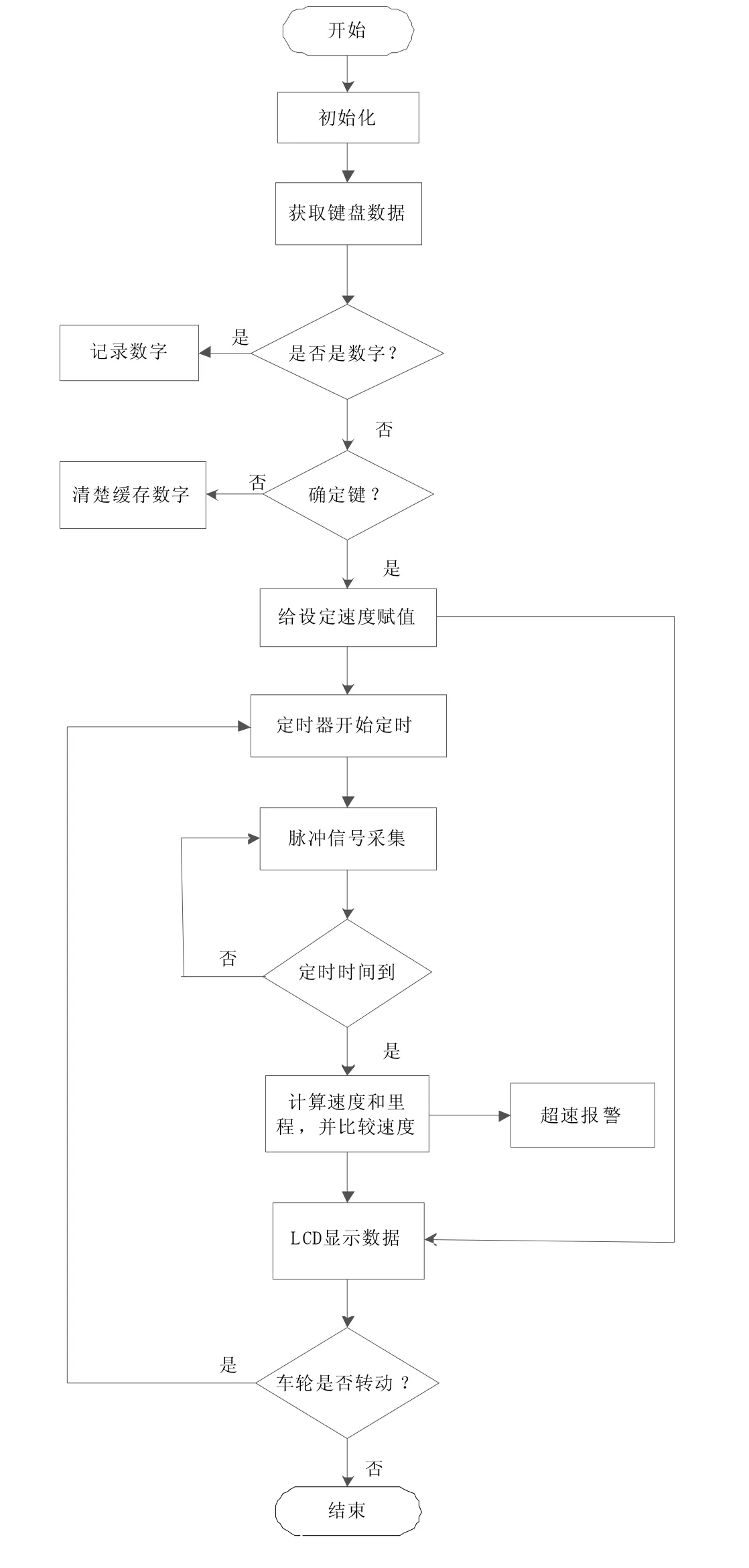
图5 系统主程序流程图
3.2 系统子程序设计
3.2.1 定时器中断服务程序流程图
本设计通过定时器T0,定时0.5 秒后,对INT0 和INT1 记录脉冲的数量进行处理,分别计算出瞬时速度、0.5 秒内的行驶里程,累加里程,累加时间基数,接着对t 时刻和t-1 时刻的速度进行滤波得到传感器的速度。如图6 所示。
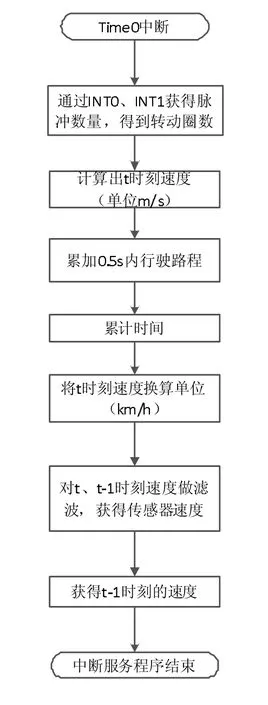
图6 定时器中断流程图
3.2.2 脉冲信号输入模块流程图
电动自行车启动后,车轮开始转动,霍尔传感器产生的脉冲信号经过滤波电路输入到单片机。单片机的INT0 和INT1 记录脉冲信号的数量,定时器定时时间到,计算出瞬时速度、累加里程以及累加时间基数。如果电动自行车没有停止,重新定时计数。当电动自行车停止转动,脉冲信号采集结束。其流程图如图7 所示。
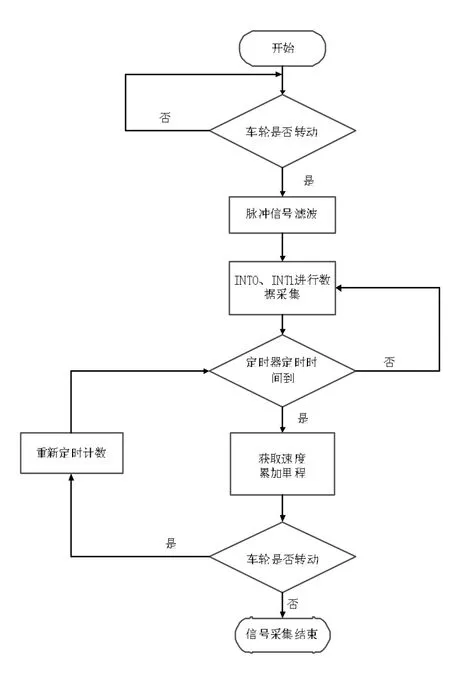
图7 脉冲信号采集流程图
3.2.3 报警模块流程图
当电动自行车的行驶速度大于或者等于预先设定的最大速度时,通过判断Bi 的电平对信号进行控制,当Bi 为低电平时,蜂鸣器会发出滴滴长鸣声,LED 会亮起;当Bi 为高电平时,则进入初始化状态。具体如图8 所示。
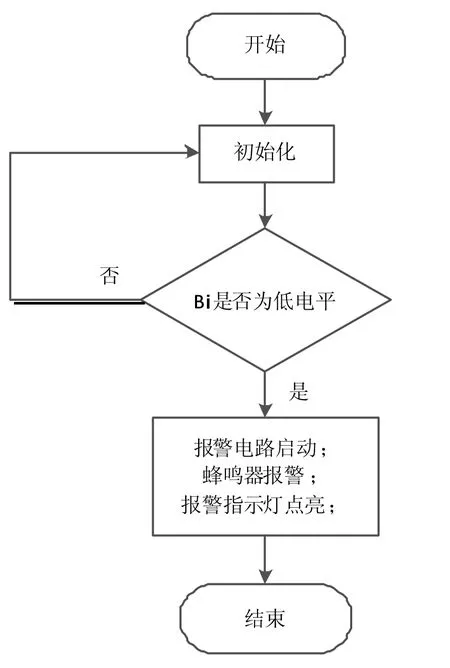
图8 报警电路流程图
4 结论
针对电动自行车车速问题,设计了一款利用霍尔传感来检测脉冲信号对电动自行车行驶过程中速度实时监测系统。该系统通过STC89C52 对脉冲信号进行分析和计算,最终在LCD 液晶显示屏上显示出平均速度、瞬时速度以及行驶里程。本设计系统性能稳定、成本低,能够满足人们日常对电动自行车超速报警的基本需求,而且此测速报警系统可以在很多速度监控的场合使用,具有非常广泛的应用前景。
