基于Roboguide平台下仿真环境设计
2021-10-16张广祥李玉爽
张广祥 李玉爽


摘要:在Roboguide平臺模拟工厂,通过虚拟环境优化工厂布局并仿真生产过程,在虚拟环境中能真实地模拟生产线的运动,为设计提供依据可行性的根据,且在计算机上可方便地修改完善设计,实验不同的方案,对生产线进行不断的优化,可以大大减少调试的成本。在ROBOGUIDE平台上分别从机器人控制柜、机器人执行机构、到工装数模和外围设备进行设计,从而完成机器人加工生产虚拟环境的仿真设计,为机器人仿真提供了基础环境。
关键词:虚拟环境;仿真;工业机器人
中图分类号:TP391.9 文献标识码:A 文章编号:2096-4706(2021)07-0088-03
Design of Simulation Environment Based on Roboguide Platform
ZHANG Guangxiang,LI Yushuang
(Wuhu Institute of Technology,Wuhu 241003,China)
Abstract:To simulate the factory in the Roboguide platform,with the help of virtual environment to optimize the factory layout and simulate the production process,and we can simulate truly the production line movement in the virtual environment,which provides the basis for the design. Furthermore,it is convenient to modify and perfect the design on the computer,test different schemes,and optimize the production line continuously,which can greatly reduce the cost of debugging. Based on the ROBOGUIDE platform,the robot control cabinet,the robot actuator,the tooling digital simulation and the peripheral equipment are designed respectively,so as to complete the simulation design of the robot manufacturing virtual environment,which provides the basic environment for the robot simulation.
Keywords:virtual environment;simulation;industrial robot
收稿日期:2021-03-08
项目基金:省级质量工程项目:智能制造虚拟仿真实验教学项目(2019xfzx03)
0 引 言
随着工业科技的快速发展,信息技术在智能制造领域应用十分广泛,计算机虚拟仿真成为探究复杂系统的重要技术手段。采用仿真技术能够不断优化生产系统方案,缩短新产品开发的周期,减少人工劳动,降低生产成本[1]。在工业4.0和“中国制造2025”大背景下,工业机器人的广泛应用,通过信息技术和数字化手段,对实现我国工业制造的技术变革和快速发展有着重要的意义[2]。
1 机器人控制柜设计
在ROBOGUIDE环境中,工作单元Workcell建立完成之后,导入布局机器人的控制柜和机器人基座,在“Cell Browser”里选择障碍物“Obstacle”添加电气设备,利用CAD、Pro/E等相关三维软件进行建模,再将其导入到ROBOGUIDE虚拟环境中。调整好控制柜位置之后锁定,为了作业者操控安全,使控制柜的位置入到机器人的工作范围以外,如图1所示。根据生产和操作环境需要,对机器人工作高度进行调整,通过ROBOGUIDE系统软件进行建模,设计相应机器人底座,加载应用从而满足高度和固定要求。
2 ROBOGUIDE下构件建模设计
在ROBOGUIDE虚拟环境中对设备和工件进行设计并准确布局,根据功能需求正确创建仿真环境,才能作为工业机器人离线编程和系统仿真的依据,先要将虚拟仿真环境规划设计好,为系统调试和生产加工的仿真创造条件。在运行ROBOGUIDE软件之前,首先要进行CAD或PRO/E建模,将要导入的模型提前建立完成。因为在ROBOGUIDE软件数据库中缺少在数控车床上下料中所需要的一些模型。所以需要提前加工所需要的毛坯件、成品件、手爪、上下料架和数控车床的三维模型。建立完成之后就可以开始进行ROBOGUIDE软件的配置,开始建立Workcell工作单元,在虚拟环境中实现机器人自动上下料的过程。
2.1 工件模型设计
根据生产需要利用PRO/E对毛坯件、半成品、成品件进行建模,毛坯件为长度85 mm,直径50 mm,质量为3.0 kg的圆柱形状结构。由于在设计上,材料毛坯件以及成品件都采用旋转体结构,需要从两端对其进行加工,其中从右端进行镗孔,从左端对其进行沟槽;为了达到加工的精度要求,需进行二次深加工。为了便于装夹,优先选择需要先加工镗孔的那一端,加工完成后再加工零件的另一端,加工所要的工件模型,如图2所示。
2.2 上下料架台模型设计
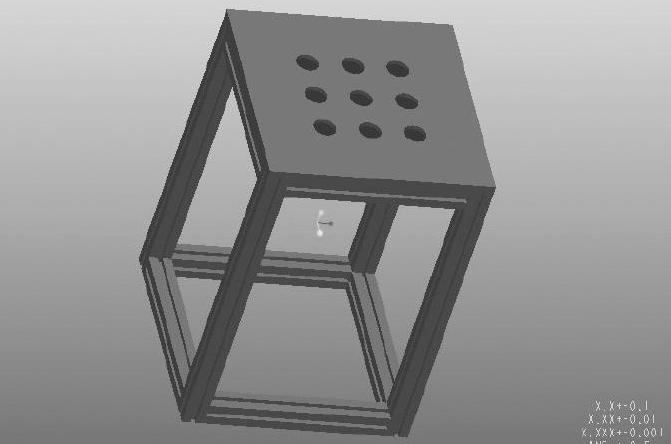
机器人上下料架台,用带滚轮的架子来输送零件。总体分布,零件整齐排列在正方形架子上。上下料操作台架为非标准工件,根据实际需要的尺寸进行加工组装制造。9个零件排列为三行三列,零件相互间隔约为50 mm。而放置零件的架子初步定为长宽都为500 mm,高度根据实际需要进行修改。为了使零件在工作架台上固定,不发生位移,则在其两端设置挡板;左侧挡板为工装板,则根据零件分布位置打通孔,右侧挡板则设置为底板厚度为15 mm,圆孔的内径比零部件尺寸略大一点,采用螺栓在四周将工装板进行固定在底板上。可以有效增加操作架台的利用度,当加工不同的零部件时可以根据需要,直接调换加工挡板,提高工作效率,对机器人上下料架台进行三维建模如图3所示。
上下料架摆放零件的平面运用拉伸指令建立,并在其上作为草绘平面建立圆孔拉伸切除材料,支架同样拉伸建立,运用阵列将支架放置完成。上下料架的支撑柱采用工业铝型材(欧标)40系列,完全可以承载得住零件的重量。其铝型材的横截面如图4所示。该铝型材长度可以根据自身需要进行截断,再进行组装。该架子底部安装四个轮子,便于运送毛坯件和成品件。轮子选择万向轮CMJZ50-N,脚轮直径50 mm,最大承载重量为75 kg。
2.3 机器人手爪模型设计
机器人手爪是机器人关键零部件之一,用来夹持工件或操作工件,其性能的好坏很大程度上决定了机器人的工作性能,是工业机器人与外部环境相互作用的最后环节和执行部件。平行型气动手爪,可以反复开合,能够牢固抓取圆柱件;平行型手爪结构运动灵活,体积较小,方便抓取工件,加工零件通常是圆柱体结构,放置在水平操作面上。利用PRO/E拉伸指令建立模型,其三维设计模型如图5所示,不需要建立手爪的内部结构。对手抓的模型多余材料进行切割,设计完成后,导入ROBOGUIDE软件环境中。
机器人的手爪为了能够成功夹取零部件,还需要在手爪上安装外部手臂。该手爪的外部手臂模型,分别安装在手爪的两侧,两者之间的间距符合夹取零件的要求。机器人手抓的外部手臂是手爪配件之一,在ROBOGUIDE软件中可根据实际需要选择合适的外部手臂进行安装。
为了使ROBOGUIDE环境中手爪体现出开合状态,需要分别建立手爪打开和闭合的两种状态。然后将这两种模型机器人手爪,导入ROBOGUIDE环境中并加载在末端执行机构上,要求整体的外观数据准确。将建立好的模型导入虚拟环境中。
2.4 建立Workcell工作单元
在系统中完成部件和零件建模后,新建New Cell工作单元。根据工业机器人上下料功能需要,从机器人配置界面中选择搬运指令系统软件,对工业机器人和零部件选型,并在环境中建立相应模型,在系统软件中对工业机器人以及零部件进行构建,同时进行系统的备份。本文采用的工业机器人型号为发那科FANUC M-20iA,为满足虚拟工厂功能的需要,不仅可以实现机器人对工件的搬运,还可以对机器人增加附加轴实现其弧焊、喷漆、切割等较复杂的功能。在六轴上再添加辅助轴,则需要进行附加轴运动组设置;编码系统和PC接口根据需要分别选择R796和R641,建立完成之后进入信息系统画面。
3 ROBOGUIDE下虚拟工厂环境设计
虚拟工厂中将所建立的模型导入系统,为进行虚拟环境的规划布局做准备,并规划机器人运行的轨迹使机器人运行程序的编写能够顺利完成,最后要在整个虚拟工厂数控车床自动上下料的虚拟环境下,对整个虚拟工厂是否能够正常运行进行系统仿真,来验证程序的可行性。
3.1 导入工装设计模型
在ROBOGUIDE虚拟环境中添加数控加工机床、上料架、下料架、毛坯件、产品、围栏。由于虚拟仿真的特殊性,在进行仿真环境布局之前首先要考虑到机器人的工作空间。机器人工作空间是指在机器人正常运行过程中所能达到的区域[3]。所以在虚拟仿真环境中的工装、零件的位置一定要安置在机器人的工作空间之内,并且需要保证设备安全。
以数控车床CJK6140为载体,作为虚拟环境自动上下料的对象。该机床具备加工各种形状复杂零件的能力,几乎适用所有类型零件地生产。按照设备的布局,在界面中调整数控车床的位置。将机器人的工作范围显露出来,将数控车床的工作平台处于机器人的工作范围之内。位置布置完成后锁定数控车床位置,使其在机器人的工作范围之内,锁定位置并应用。毛坯件和成品件导入到工作平台,上下料工作架台属性框中出现毛坯件和成品件选项,在上料工作架台选择毛坯件,下料工作架台选择成品件,分别进行应用,完成模型的导入设计。
3.2 导入外围设备
当机器人、数控车床、上下料架、控制柜等布置完毕后,接下来就需要添加外围设备围栏。在机器人自动运行时为了保证安全,添加围栏是必须的,这样可以有效的规避安全事故,防止外部因素干扰机器人自动运行,同时也保证了机器人与数控车床自动运行中出现事故时不会对周边工作人员造成伤害[4]。
在“Fence-EXP-H2000-W1000”加载进虚拟界面,按照要求设计调整围栏位置;根据需要自行选择围栏的数目,在设置围栏位置时注意将机器人控制柜放在围栏外,如图6所示。
在ROBOGUIDE环境下进行虚拟仿真环境设计后,进行离线编程仿真运行,來模拟整个数控车床自动上下料的进程,为实际工厂生产线安装人员提供试验平台,并对方案提供可行性论证的依据,对生产线进行不断的优化改进[5],直至达到理想的智能生产线设计方案。
4 结 论
本文基于Roboguide平台下虚拟现实技术在生产应用中的研究,通过建立工作单元New Cell,利用PRO/E对工件、上下料架台和工业机器人夹爪进行三维建模设计,导入虚拟仿真系统,并对整体的生产加工环境和电气控制设备进行总体设计布局。通过对工业机器人编程和仿真设计,合理规划机器人运动轨迹,使整个设备之间在生产过程中不发生碰撞,保障人身和设备安全,并实现生产系统功能。通过采用虚拟技术对工业机器人生产加工进行仿真设计,有效模拟工厂真实加工制造的过程,不仅提高了生产操作者和编程人员的安全性,极大程度上降低了生产成本和工人劳动强度,而且改善了生产作业环境,提高生产效率,提高工件的生产加工精度,保证产品质量,提高企业竞争力,对工厂生产制造具有重要的实际指导意义。
参考文献:
[1] 陈政君.喷雾机设计中的三维数模应用 [J].北京农业,2013(18):175.
[2] 霍爱清,李少辉,李浩平.基于Unity 3D的钻井工程三维动态仿真 [J].西安石油大学学报(自然科学版),2018,33(6):79-83.
[3] 丁玮,张冰蔚,孟庆员,等.六自由度经济型工业机器人设计与运动学分析 [J].机床与液压,2019,47(11):19-23.
[4] 宋琳,刘炜,曾耀华,等.基于Roboguide的商用车门框机器人焊接的设计与仿真 [J].汽车零部件,2018(8):47-52.
[5] 张广祥.ROBOGUIDE环境下虚拟工厂的仿真研究 [J].科技创新与生产力,2020(8):58-60.
作者简介:张广祥(1982—),男,汉族,安徽亳州人,硕士研究生,讲师,研究方向:自动化控制。
