基于改进模糊控制的并联机器人运动路径跟踪研究*
2021-10-15张丽君段昌盛赫桂梅
张丽君,段昌盛,赫桂梅
(1.江西财经大学 信息管理学院,江西 南昌 330032;2.华中科技大学 电子信息与通信学院,湖北 武汉 430074; 3.武汉华夏理工学院 土木建筑工程学院,湖北 武汉 430223)
0 引 言
随着社会科技的进步,机器人的智能化水平也越来越高。并联机器人是机器人种类中的一个分支,主要由基座平台、运动支链、液压驱动系统、控制器及传感器等装置构成。并联机器人具有刚度大、负载能力强、驱动力稳定等优点,广泛应用于农业、医疗、海洋及航空等许多领域[1,2]。并联机器人的核心部分是控制系统,其设计好坏直接影响机器人的智能化程度和运动精度。
近年来,为了提高并联机器人运动路径跟踪精度,国内外许多学者对并联机器人的研究也在不断深入。例如:文献[3,4]研究了并联机器人模糊PID系统,采用Solidworks创建并联机器人三维模型,设计了模糊PID控制器,建立并联机器人运动仿真模型,提高了并联机器人运动的稳定性。文献[5,6]研究了并联机器人神经网络滑模控制系统,建立了并联机器人结构简图,设计了神经网络滑模控制器,通过MATLAB软件对并联机器人运动轨迹进行仿真,提高了并联机器人运动轨迹跟踪精度。文献[7,8]研究了并联机器人滑模控制系统,建立了并联机器人结构示意图,设计了滑模控制器,对控制器的稳定性进行了分析,对并联机器人位姿的动态响应进行了测试,具有较好的控制精度。虽然过去研究的并联机器人运动轨迹跟踪精度有所提高,但是,在复杂未知环境中运动时,容易受到不确定因素的干扰,导致跟踪精度下降。
对此,本文建立了并联机器人运动机构简图,利用欧拉—拉格朗日方程得到并联机器人系统的动力学方程,为了提高并联机器人在复杂环境中的抗干扰能力,采用混合算法优化模糊比例—积分—微分(proportion—integration—differentiation,PID)控制器,将优化后的控制器用于机器人运动路径跟踪,最后采用MATLAB软件对并联机器人运动路径进行仿真,对比优化前和优化后的跟踪精度,为深入研究并联机器人控制系统的抗干扰能力提供参考价值。
1 并联机器人
1.1 机器人运动学分析
并联机器人结构简图如图1所示,根据图1的几何结构,对于每个运动链,向量方程表达式为
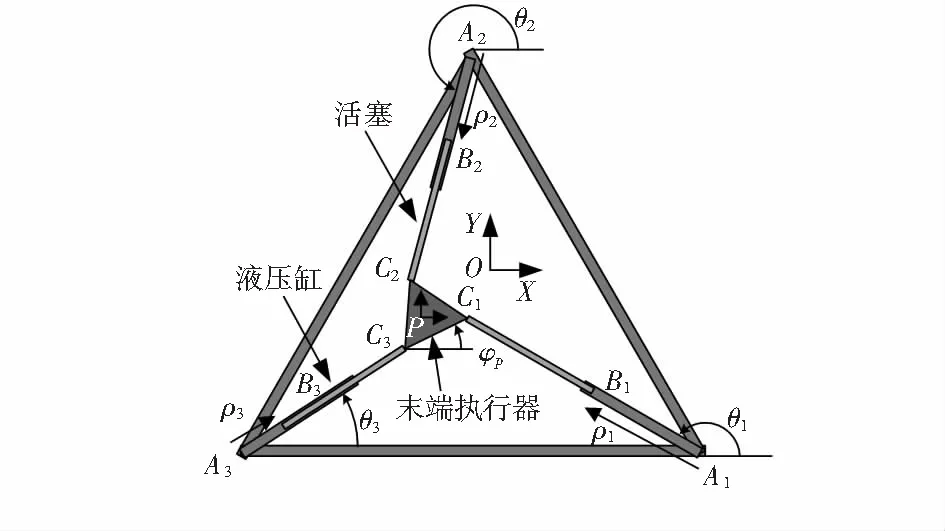
图1 并联机器人结构
AiBi+BiCi=AiP+PCi
(1)
点Ci的坐标可通过运动链AiBiCi关系式得到,如下所示
(2)
式中xci和yci为点Ci的坐标;xai和yai为点Ai的固定坐标;l为中间手臂BiCi的长度。
通过使用末端执行器的坐标,如图2所示,可以得到点Ci的坐标为
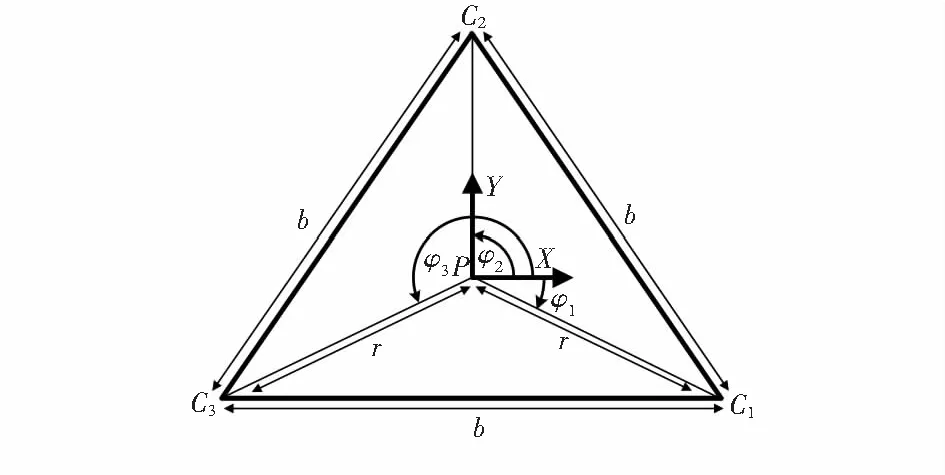
图2 末端执行器
(3)

根据式(2)、式(3)可以得到
(4)
式中T2i-1和T2i分别为沿x和y方向的约束方程。

(5)
式中r为连接末端执行器(点P)的中心到关节Ci的线段PCi的长度;φi为r和x方向之间的角度。
关于末端执行器是等边三角形,r值可以通过三角形变长得到。根据等边三角形的几何形状,可以得到角度φ1=-π/6,φ2=π/2,φ3=7π/6。
通过求解上述基于xp,yp和φp参数的方程组,得到了构成刚性机器人逆运动学方程式为
(6)
通过求解该方程组,得到并联机器人的直接运动学方程如下
(7)
式中σ1=cos(θ1)×cos(θ2);σ2=cos(θ2)×sin(θ1);σ3=cos(θ1)×sin(θ2);σ4=sin(θ1+θp);σ5=cos(θ1+θp);σ6=sin(θ2+θp);σ7=cos(θ2+θp)。
1.2 机器人运动学分析
根据拉格朗日方程[9,10]可以得到机器人动能项如下
(8)
式中TC,TP,TE分别为并联机器人的圆柱、中臂和末端执行器的动能;IP,IC为质量惯性矩;θ′i为第i个圆柱体的角速度;mp为每个中臂的质量;lp为圆柱体质心和中臂之间距离;ρi为活塞质心和接头Ai之间距离;ρ′i为活塞沿第i个中臂轴线的平动速度;me为末端执行器的质量;Ie为末端执行器质量惯性矩;x′p,y′p分别为质心P沿x轴和y轴的平移速度;φp为末端执行器关于点P的角速度。
基于上述方程,拉格朗日函数定义为:L=T。利用欧拉—拉格朗日方程,得到系统的动力学方程为方程为
(9)
式中F1,F2和F3分别为并联机器人三个棱柱作用力;bi为作用力的系数。
上述方程式可写成如下
M(q)q″+C(q,q′)=H(q)U
(10)
式中q=[xpypφp]T为系统坐标组成的向量;M(q)为惯性矩阵;C(q)为科里奥利力矢量;H(q)为输入矩阵系数;U=[F1F2F3]T为力组成的向量。
2 控制器优化设计
2.1 混合算法
混合算法通常由二种及多种算法组成,本文采用粒子群算法和遗传算法两种算法组成。粒子群算法速度和位置更新公式[11]为
(11)
式中w为惯性权重系数;c1,c2为粒子速度更新参数;r1,r2为随机数;Vt,Vt+1分别为粒子迭代t次和t+1次的速度;Xt,Xt+1分别为粒子迭代t次和t+1次的位置;Pt和Gt分别为局部和全局最优解。
粒子群算法惯性权重系数大多采取线性递减方式,容易造成粒子陷入局部最优解范围。为了改变这种现状,惯性权重系数采用S形函数,其公式为
w=(wmax-wmin)/(1+e(2λ×t/T-λ))
(12)
式中wmax,wmin分别为惯性权重系数最大和最小调节系数;t,T分别为迭代次数的当前和最大值;λ为速度变化调节系数。
在粒子群算法中添加遗传算法的交叉和变异操作,能够快速地搜索到全局最优解。交叉操作公式[12]为
(13)
式中r为随机数;Amk,Ank分别为第m和n个个体地最优染色体。
变异操作公式[12]为
(14)
式中Amax,Amin分别为Aij地上界限和下界限;a为可调参数。
2.2 模糊PID控制器优化
传统PID控制方程式[13]为
(15)
式中kp,ki,kd分别为比例、积分和微分系数;e(t)为误差。
控制器输出误差定义为
e(t)=q(t)-qr(t)
(16)
式中q(t)为参考输入值;qr(t)为实际输出值。
PID控制调节参数计算方程式[14]为
kp=k′p+Δkp,ki=k′i+Δki,kd=k′d+Δkd
(17)
式中kp,ki,kd为待整定值;Δkp,Δki,Δkd为整定值。
模糊控制器[15,16]分为三个部分:1)模糊化处理,处理输入量;2)模糊推理,处理规则库中的经验知识;3)解模糊,处理输出量。并联机器人控制系统采用混合算法优化模糊PID控制器,其控制结构如图3所示。
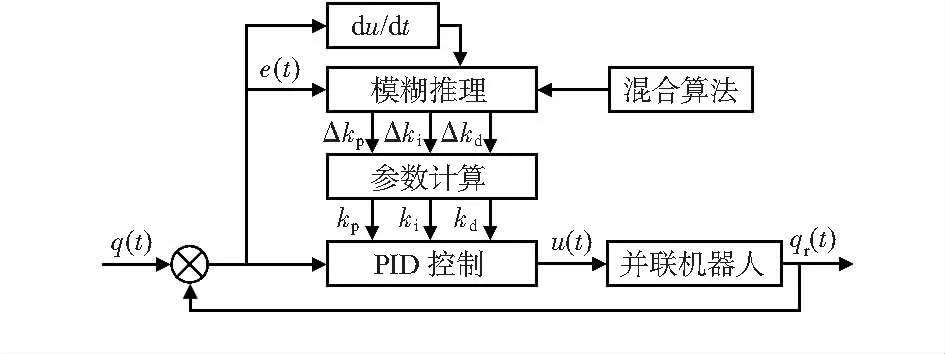
图3 并联机器人控制结构
3 运动仿真分析
通过MATLAB软件对并联机器人运动路径进行仿真,并且与优化前运动路径进行对比和分析,仿真参数如表1所示。
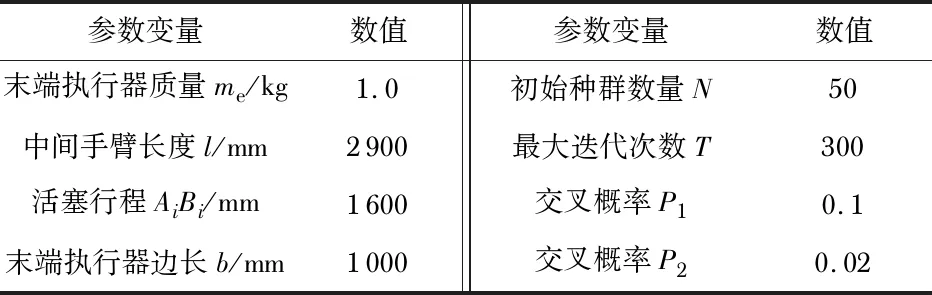
表1 仿真参数
假设并联机器人运动路径方程式定义为
(18)
仿真实验结果如图4所示。假设在无干扰波形环境中,则并联机器人位移运动路径跟踪误差如图4(a)所示,角位移运动路径跟踪误差如图4(b)所示。假设在有干扰波形(τ(t)=sin 2πt)环境中,则并联机器人位移运动路径跟踪误差如图4(c)所示,角位移运动路径跟踪误差如图4(d)所示。
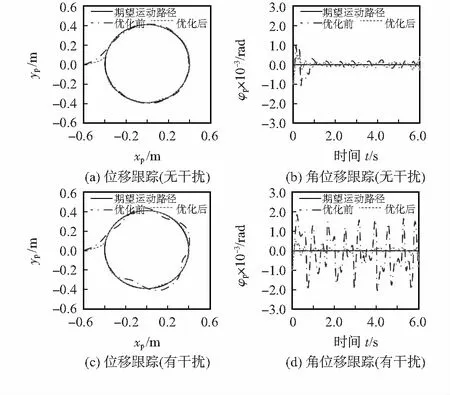
图4 仿真实验结果
4 结束语
针对并联机器人运动路径跟踪误差较大、控制系统自适应反应速度较慢问题,设计了模糊PID控制器,采用混合算法优化模糊PID控制器。
1)在无干扰波形环境中,优化前和优化后,并联机器人运动位移和角位移路径跟踪误差都较小,但是,优化前,并联机器人控制系统自适应调节反应速度较慢,而优化后,并联机器人控制系统自适应调节反应速度较快。
2)在有干扰波形环境中,采用模糊PID控制器,并联机器人运动路径跟踪误差较大,自适应调节速度较慢,而采用混合算法优化模糊PID控制方法,并联机器人运动路径跟踪误差较小,自适应调节速度较快。
3)采用MATALB软件对并联机器人运动路径跟踪误差进行仿真,可以从理论上验证优化前与优化后的控制系统抗干扰能力,为研发人员提供数据参考,从而提高控制系统的输出精度。