脉冲电子束荧光技术测量稀薄流场速度研究
2021-10-15陈爱国李中华李震乾龙正义
陈爱国, 王 杰, 李中华, 李震乾, 田 颖, 龙正义
(中国空气动力研究与发展中心超高速空气动力研究所, 四川绵阳 621000)
引 言
高超声速低密度风洞喷管出口的稀薄流场速度是重要参数之一, 如来流的动压、 Reynolds数等参数计算公式中均包含有速度这一物理量. 速度测量的传统手段是采用Pitot管获得流场中测点位置的Pitot压力, 结合风洞稳定段总压和总温, 通过正激波关系式可计算得到流场的Mach数, 进而获得流场速度, 是一种间接测速的手段. 目前, 流场速度非接触测量手段有粒子图像测速技术(particle image velocimetry, PIV)、 Rayleigh散射测速技术、 激光诱导荧光(laser induced fluorescence, LIF)、 脉冲电子束荧光技术(pluse electron beam fluores-cence, PEBF). PIV技术[1-3]和Rayleigh散射测速技术在高超声速低密度风洞中应用需要流场中有激光散射的粒子[4], 且粒子跟随性满足高超声速流场跟随性的要求[5], 跟随性好的粒子直径小, 制备和存放困难, 往流场中添加难度较大. 激光诱导荧光技术需要流场中有激光可以激发荧光的气体分子或自由基, 对于以氮气为主要介质的低密度风洞, 需要添加可激发的气体[6], 高超声速低密度风洞中难以直接应用激光诱导荧光技术. 脉冲电子束荧光技术可以在稀薄条件下激发氮气分子产生荧光, 无需在流场中添加其他组分, 适合高超声速低密度风洞稀薄流场速度测量; 相比于Pitot管测压技术这一传统手段, 测点多, 且相互无干扰.
法国ONERA的Mohamed等 1993年以来采用脉冲电子束技术测量了稀薄流场速度[7-8], 只是给出了平均值, 未给出流场速度分布; 美国的Lutfy等1996年以来开始脉冲电子束技术应用[9-12], 但未提供流场速度分布的测量结果. 国内中国空气动力研究与发展中心叶希超[13]和中国科学院力学研究所林贞彬等[14]开展过电子束荧光技术的研究, 但没有开展过脉冲电子束荧光技术的研究.
为了实现高超声速低密度风洞流场速度的非接触测量, 发展了脉冲电子束荧光测速技术, 研制了脉冲电子束荧光测速系统硬件及速度图像处理软件, 给出了Φ0.3 m高超声速低密度风洞Ma=12喷管出口的速度场分布, 核心区7次重复性最大偏差约10%, 轴线上速度测量结果与Pitot管测压技术、 Rayleigh散射测量结果、 N-S/DSMC模拟结果相比偏差为1%.
1 脉冲电子束荧光测速原理和设备
1.1 原理
电子枪通过加热钨丝发射热电子, 再对电子进行加速、 聚焦而形成一束细的高能电子束, 稀薄条件下(气体分子数密度n≤1×1016/cm3)气体分子和高速运动的电子相互作用后, 基态气体分子受到激发处于离子的高能激发态, 不稳定的离子高能激发态跃迁至稳定的离子基态, 同时发出多个波长的光子, 不同波长的光子有不同的寿命, 以高超声速低密度风洞中最常用的氮气介质为例, 其中各种光子寿命为66 ns~50 μs, 荧光即为所有光子的集合, 荧光在流场中会跟随气流边流动边衰减. 脉冲电子束测量速度时序如图1所示, 同步控制器同时发出触发信号给电子枪和ICCD, 以一个脉冲周期为例, 电子枪收到高电平信号时发射电子束, 在流场中发出荧光, 电子枪收到低电平脉冲信号时, 停止发射电子束, 不再激发气体产生新的光子, 荧光束强度逐渐衰减, 并且荧光束位置会随流场变化; ICCD收到低电平脉冲信号时, 延迟t0拍摄一张流场中荧光束的图片, 间隔Δt再拍摄一张流场中荧光束的图片; 通过两张图片中荧光束的位移和时间间隔即可获得荧光束的运动速度, 由于光子在流场的跟随性好, 荧光束的运动速度即为流场速度. 这种方法在文献[8]中也称为飞行时间法(time of flight, TOF).
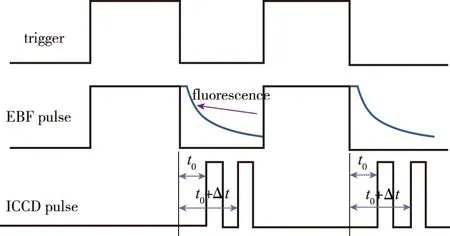
图1 脉冲电子束测量速度的时序示意Fig. 1 Sequential sketch of velocity measurement by PEBF
由于荧光强度弱, 拍摄时间短, 图像中荧光束分辨质量差. 为提高图像中荧光束对比度, 重复多个脉冲,t0与t0+Δt时刻的各自图像累积叠加.
1.2 低密度风洞
实验在CARDC的Φ0.3 m高超声速低密度风洞(风洞代号FD-17)上进行, 该风洞是一座典型的高压下吹、 真空抽吸的暂冲运行风洞. 风洞由气源系统、 加热器、 稳定段、 喷管、 实验段、 扩压段、 冷却器、 真空系统和测试系统等部分组成. 该风洞目前配备有型面喷管8套, 喷管出口Mach数为5, 6, 7, 8, 9, 10, 11, 12; 锥形喷管3套, 喷管出口Mach数为12, 16和24, 所有喷管出口直径均为Φ300 mm. 介质为氮气或空气, 实验根据不同的状态可分别选用石墨电阻加热器或储热式加热器进行加热或不加热. 本次速度测量实验选用名义Ma=12型面喷管, 采用氮气为介质), 通过石墨加热器提供热源, 实验状态: 总温为650 K, 总压为2 MPa.

图2 低密度风洞主体设备图Fig. 2 Main facilities of low density wind tunnel
1.3 电子枪、 同步控制器、 ICCD和标尺
电子枪及X-Y运动工作台安装在风洞实验段顶部(见图3), 电子枪在沿喷管轴线移动200 mm、 径向移动80 mm的行程, 可进行多个位置的速度测量. 电子枪的电子能量为0~50 keV, 束流为0~10 mA, 脉冲频率为0~50 kHz.

图3 电子枪安装在风洞实验段顶部Fig. 3 Electron gun on the top of test section
同步控制器为Micropulse 725可编程同步时序控制器, 有7路TTL控制信号可同时输出, 延时误差为(0.25+0.000 1)ns周期. 分析对于50 kHz脉冲频率的信号输出, 其延时误差为2.25 ns, 相对20 μs 的周期而言, 其偏差为0.011%.
ICCD为增强型CCD 相机, 面阵像素为1 024×1 024, 门控式快门技术可实现 2 ns 的高速门控, 荧光屏材料为P43. ICCD相机前加装镜头可实现光路清晰聚焦流场, 计算机控制ICCD相机实现图像获取, 并通过图像处理获得速度分布.
风洞实验段附近的测试仪器布置及光路如图4所示.

图4 测试仪器布置及光路示意图Fig. 4 Sketch of instrument layout and optical path
标尺采用半透明的亚克力板制作, 表面有纵横刻度的网格, 标尺板安装在支撑座上, 其相对于喷管出口位置通过测量可确定. 实验前通过ICCD相机拍摄的标尺图像和像素的关系(见图5), 横向刻度可确定分辨率以计算电子束荧光随流场的位置变化, 纵向刻度可确定测点位置, 该图的分辨率为0.071 mm/像素.
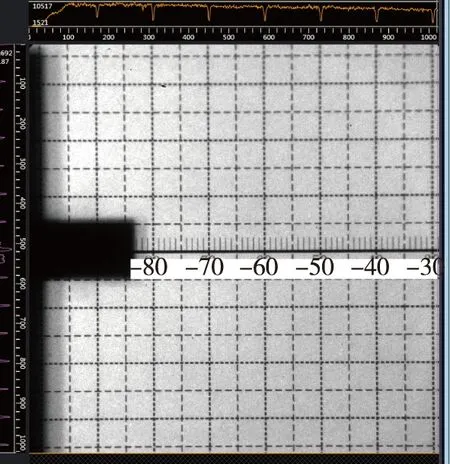
图5 标尺在ICCD的图像Fig. 5 Ruler photo in the ICCD
2 脉冲电子束荧光测速结果及分析
本次实验的主要设置参数如下: 同步控制器提供的脉冲频率为50 kHz, 高低电平脉宽均为10 s, ICCD相机的增益为100, 曝光时间和拍摄间隔均为1 μs, 照片累积次数为50 000; 在实验中对ICCD相机中照片累积次数进行了多次调试, 发现在照片累积次数为50 000获得的图像相对较为清晰. 选取其中t0=2 μs, Δt=4 μs的两张图像(见图6)进行处理可获得流场的速度分布.
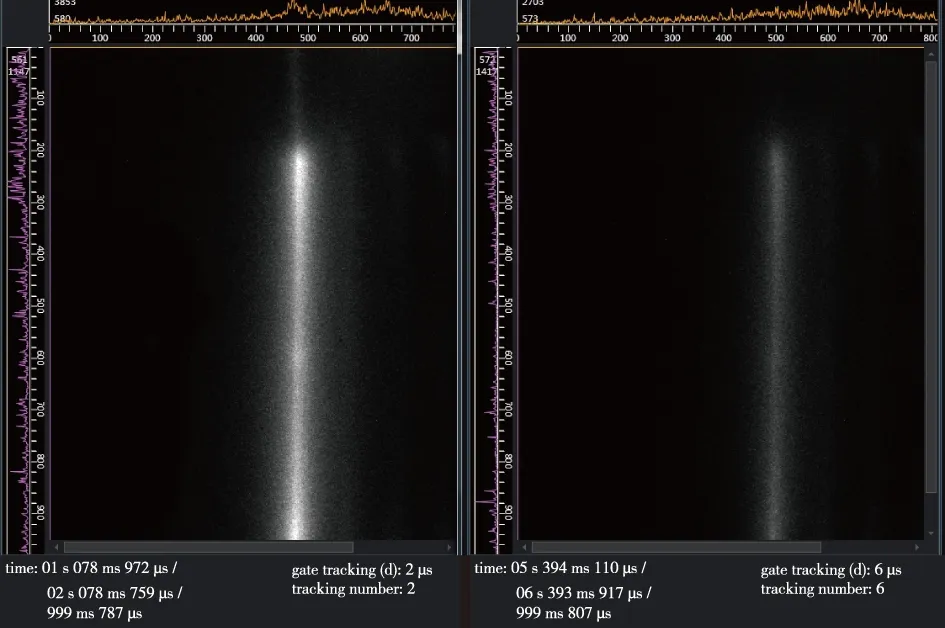
图6 电子枪停止工作2 μs和6 μs时的荧光束图片Fig. 6 Fluorescence beam photo when the electron gun stops working for 2 μs and 6 μs
针对Ma=12型面喷管出口X=150 mm截面, 在一次稳定的吹风中采集了7次, 即采用同一参数进行了7次径向速度分布测量, 图7为7次测量的速度径向分布结果, 图8为径向速度测量的重复性偏差, 可见测量速度结果波动较大, 大部分偏差在10%以内. 重复性偏差较大的原因主要为荧光弱、累积次数多, 给荧光准确位置的图像判读带来偏差, 进而引起速度的较大波动. 以图5的标尺和像素分辨率, 横向一个像素点的判读误差, 在Δt=1 μs相当于71 m/s的速度误差, 这也是该方法测量结果波动大的原因之一. 为得到较为准确的值, 多次测量值取平均是通常的处理办法.
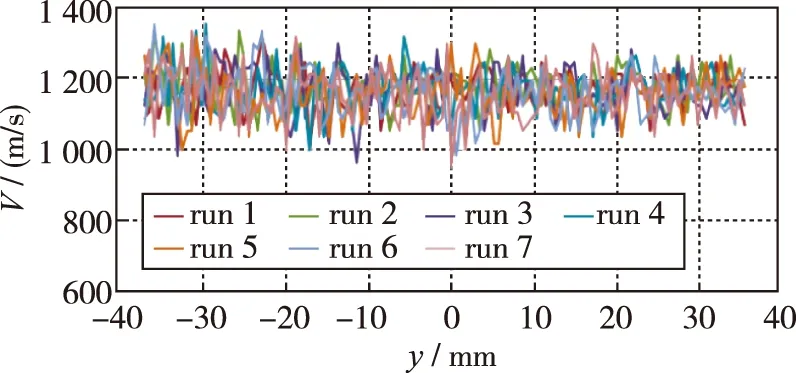
图7 速度分布7次重复测量结果Fig. 7 Seven measurement results of velocity distribution
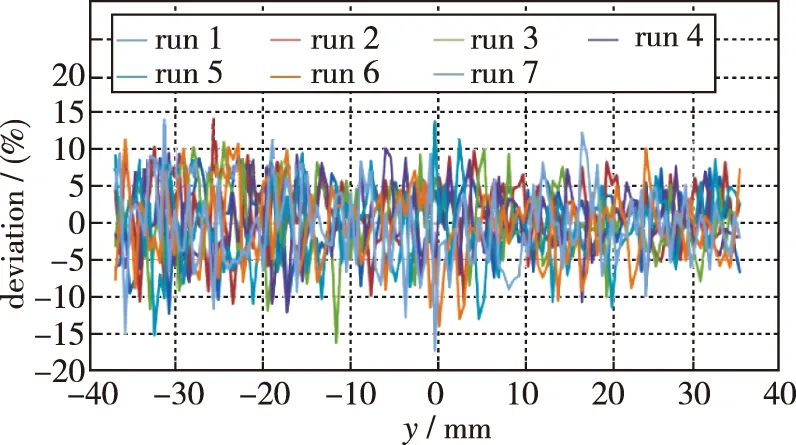
图8 速度7次重复测量偏差分布Fig. 8 Seven measurement results of velocity deviation distribution
计算7次径向速度分布测量结果的标准偏差的分布如图9所示, 最大值为45 m/s, 可作为速度测量结果的不确度, 径向各测点速度测量的相对不确定度分布如图10所示, 最大值为4%.
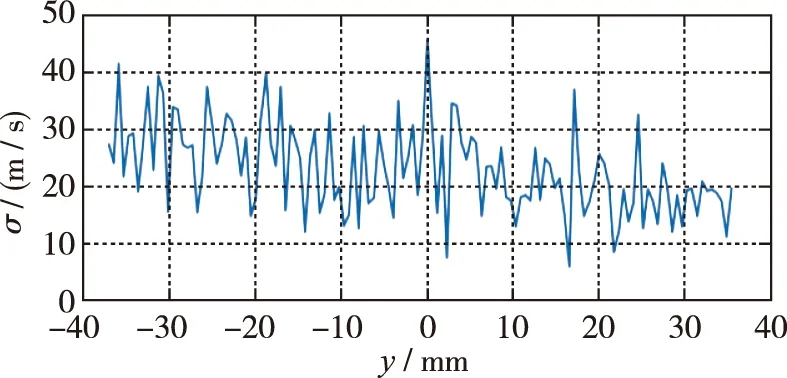
图9 径向各测点速度标准偏差分布Fig. 9 Standard deviation distribution of radial velocity
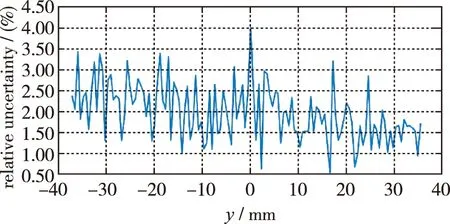
图10 径向各测点速度测量相对不确定度分布Fig. 10 Relative uncertainty distribution of radial velocity
3 4种方法获得的速度比较
目前Φ0.3 m高超声速低密度风洞速度获得手段有脉冲电子束荧光测速技术、 Pitot管测压技术、 Rayleigh散射测速技术、 N-S/DSMC数值模拟4种手段. 表1给出了该实验状态Ma=12型面喷管出口X=150 mm截面轴线位置, 4种方法各自获得的流场速度结果. 脉冲电子束荧光技术的测量值取为图7中Y=0的7次测量值的平均值1 161 m/s; Pitot管测压技术[15-17]的速度结果为1 144 m/s; Rayleigh散射测速[4]是非接触的点测量技术, 结果为 1 140 m/s; N-S/DSMC模拟是根据运行总温、 总压和喷管内型面计算流场的参数, 其计算结果为1 153 m/s. 以4种方法获得的速度平均值作为参考, 其中脉冲电子束荧光技术测量的速度偏差为1 %.

表1 4种方法速度获得结果比较
可见, 脉冲电子束荧光技术测量的速度与其他3种方法获得的速度比较, 4种手段的相对偏差度均较小, 表明脉冲电子束荧光技术获得流场速度的方法是可靠的.
4 结论
(1)脉冲电子束荧光技术是一种稀薄流场速度的非接触测量手段, 也是一种直接测量手段, 原理清晰.
(2)脉冲电子束荧光图像清晰度不足, 导致判读误差较大, 测量结果波动大, 7次重复性偏差约10%, 最大相对不确定度为4%; 后续主要是提高荧光强度和分辨率以及ICCD的收集效率, 减少累积误差, 以降低波动, 提高重复性精度.
(3)脉冲电子束荧光技术获得的流场速度结果与Pitot管测压技术、 Rayleigh散射测速、 N-S/DSMC模拟的结果相比较, 偏差为1%.
