基于平场定标的彩色高动态范围图像非均匀校正
2021-10-13谢蓄芬,尚颖英,廖宁放
谢 蓄 芬, 尚 颖 英, 廖 宁 放
( 1.大连工业大学 信息科学与工程学院, 辽宁 大连 116034;2.北京理工大学 光电学院, 北京 100081 )
0 引 言
系统响应非均匀性导致图像不同区域的量值与场景的对应比例存在差异,进而产生了彩色图像色差。与普通彩色图像不同,高动态范围图像与场景的辐射信息成线性[1-3],彩色高动态范围图像可以应用于场景的色度测量[4-5]。对高动态范围图像进行非均匀性校正,不仅可以改善图像质量,而且可以改善成像系统的色度特性,对于成像系统的色度特征化具有重要意义。
由于HDR图像的动态范围过大,导致其非均匀性更为复杂。传统的非均匀性校正技术大多数应用于红外系统的灰度图像,根据其校正原理可以分为两大类。一类是基于均匀辐射源或反射源平场定标的校正方法,根据应用的定标点数,可以分为一点校正法[6]、两点校正法[7-10]和多点校正法[11-14]。3种方法的校正效果均受制于系统特性的影响。如果系统的动态范围较小,则一点校正法具有较好的效果;如果系统非线性程度较低,两点法效果较好;如果系统的非线性程度较高,多点法效果较好。另一类是基于场景的校正方法,可分为基于统计的[15-16]、基于配准的[17-18]和基于运动估计的[19]等。基于场景的非均匀校正受制于场景特性,基本不适用于静态拍摄的场景图像。彩色图像与一般的红外系统灰度图像存在巨大差异。由于人眼的色貌特性和显示器的特性,面向视觉的彩色图像基本上都具有明显的非线性。这一非线性随着设备的差异存在明显差异。但高动态范围图像又是一个与输入辐射成线性的图像,对于在同一帧图像数据中的响应范围跨度较大,导致平场图像难以直接应用于其非均匀校正。即传统的基于平场定标的方法难以直接应用于彩色高动态范围图像的非均匀校正。
本研究基于彩色成像系统成像机理,提出了一种线性化的两点平场定标法。方法基于平场定标实验标定成像系统三通道相对响应函数,应用响应函数对系统输出图像进行线性化,融合变积分时间场景图像,生成高动态范围图像,进一步应用同一F数下的线性化平场图像对该高动态范围图像进行两点校正。
1 彩色图像成像模型
根据辐射转换的物理过程,彩色成像系统最初的三通道响应值可表达为
(1)
式中:Rraw、Graw和Braw为线性系统的三通道响应值;φ(λ)为光谱辐射通量;τr(λ)、τg(λ)和τb(λ)为三通道颜色滤波器的光谱透过率;γ(λ)为探测器的光谱灵敏度;K为增益系数;B0为偏置系数。当暗电流被移除,同时考虑到视觉的色貌特征和显示器特性时,式(1)可表达为
(2)
式中:R、G、B代表面向视觉的彩色成像系统的三通道响应值。Fr、Fg和Fb为三通道的非线性响应函数。
2 高动态范围图像的非均匀性校正模型
由于光学系统和探测器制作工艺的影响,对于完全相同的输入辐射,各探测器的响应仍存在差异。去除非均匀性需要一定程度的逆化成像过程,这是导致非均匀性的因素。对系统的输出的图像进行线性化,可表达为
(3)
式中:RL、GL和BL为线性化三通道图像,R、G和B为系统输出的三通道图像。
根据两点校正的机理,假设Z(i,j)为某通道下的高动态范围图像,则经过两点法非均匀校正的高动态范围图像可表达为
Z′(i,j)=A(i,j)·Z(i,j)+B(i,j)
(4)
式中:Z′(i,j)为校正图像,A(i,j)为增益系数,B(i,j)为偏置系数。增益系数和偏置系数由平场定标获得,A(i,j)和B(i,j)的确定方法如式(5)和式(6)所示。
(5)
3 实验验证
3.1 成像系统特性标定
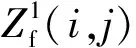
采用CanonEOS600D相机,作为成像系统;蓝菲积分球(采用2 m口径、出口直径35 cm),作为实验平场均匀反射源。为了获取不同的辐射能量,光圈数设置为F/3.5,F/6.3,F/10,F/14和F/22,在每个F数下成像的曝光时间设置为13,10,6,4,2,1,1/3,1/4,1/8,1/10,1/15,1/25,1/30,1/40和1/50 s。实验共计获得75帧平场图像。应用75帧图像拟合的三通道的响应函数如图1所示。在F/3.5下,用于两点校正的三通道的平场图像如图2所示。图2(a)、(b)和(c)对应输入辐射能量较小的低点平场图像,图2(d)、(e)和(f)对应输入辐射能量较大的高点平场图像。
(b) G通道

(c) B通道图1 标定的非线性响应系数Fig.1 Calibrated nonlinearity coefficients
(a) R通道低点
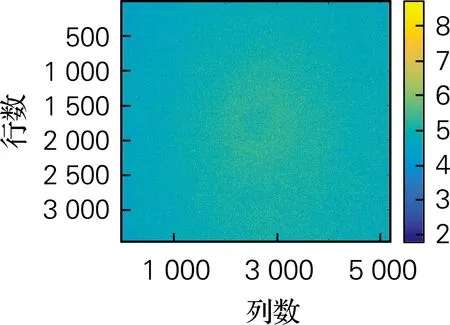
(b) G通道低点
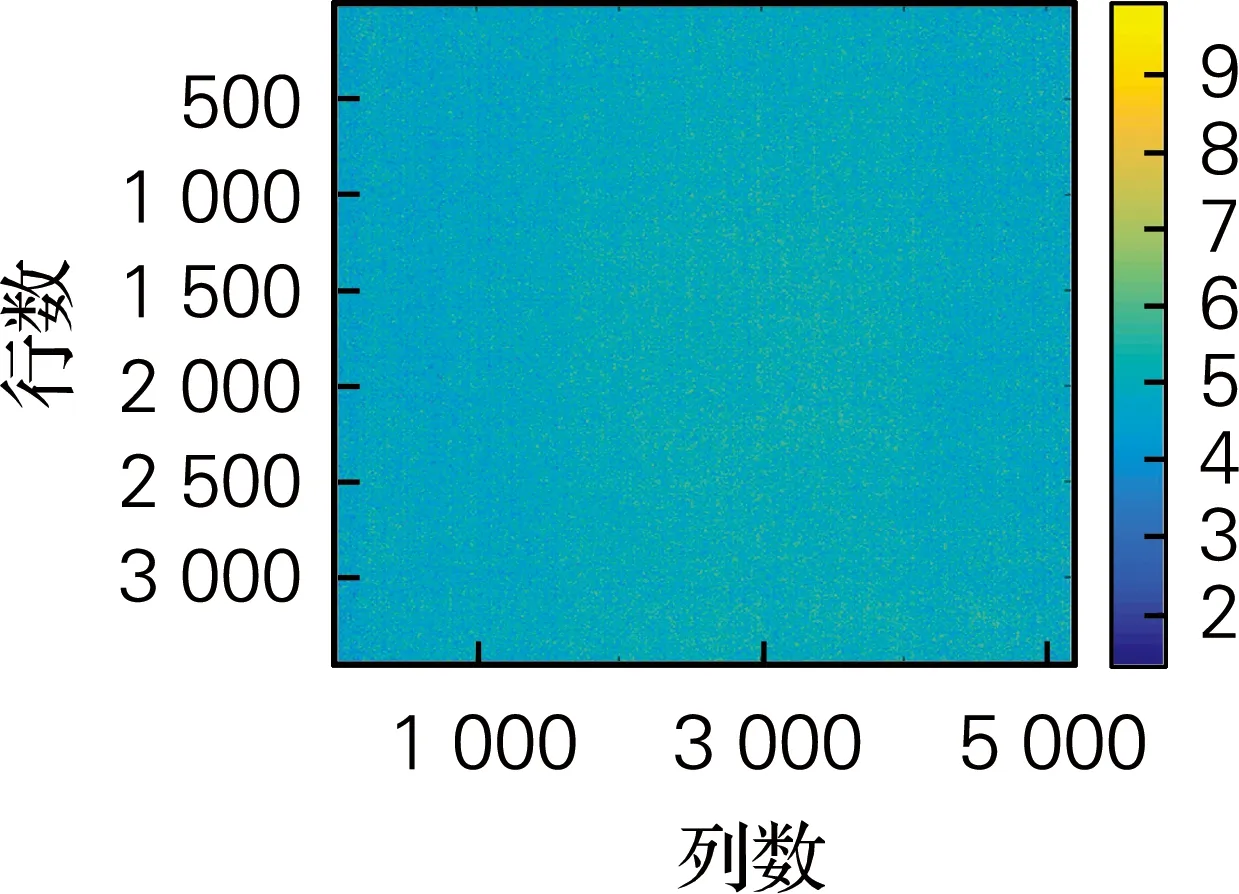
(c) B通道低点
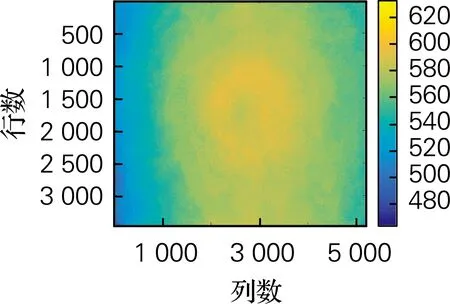
(d) R通道高点
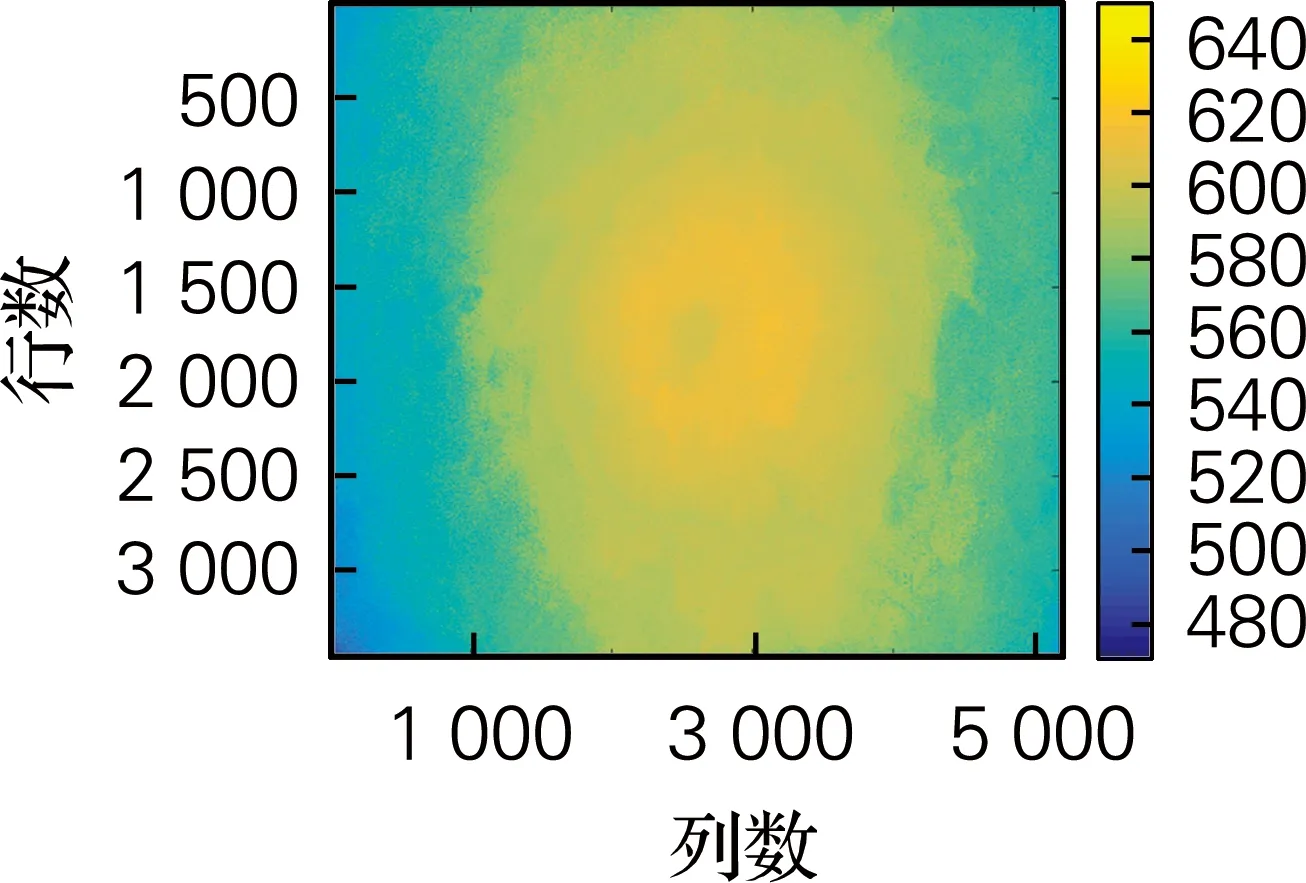
(f) B通道高点
3.2 高动态范围图像的生成
应用标定系统对高动态范围场景进行成像,选取夜间路灯照明场景,多曝光成像,获得的图像如图4所示。应用该多曝光彩色图像序列生成彩色高动态范围图像,对生成的彩色高动态范围图像按9个区域分别显示如图5所示。可见该图像细节丰富,动态范围涵盖了上面9幅图像。
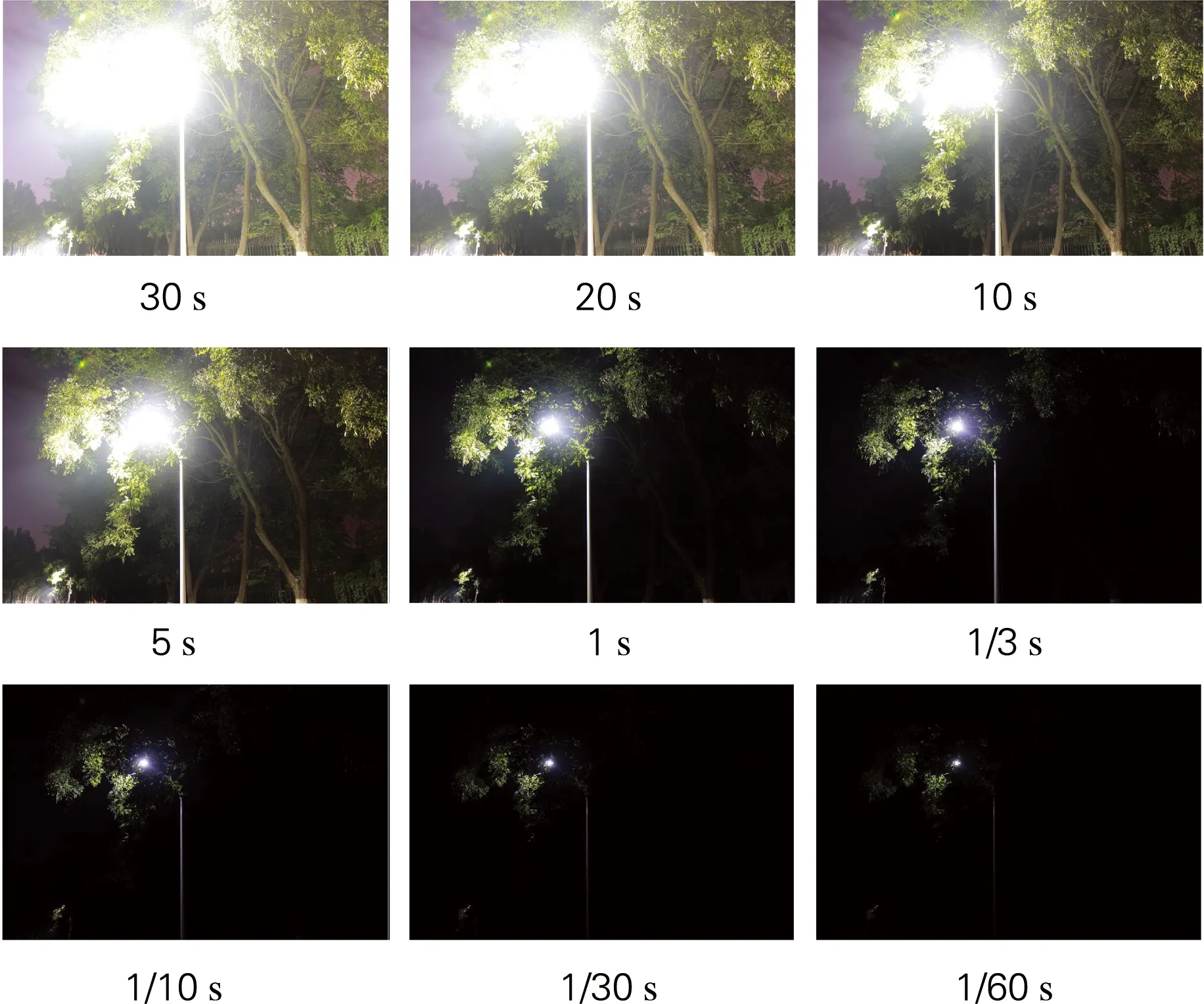
图4 不同积分时间的高动态范围场景图像Fig.4 High dynamic range scene images withdifferent integration time

图5 彩色高动态范围图像的分区域显示Fig.5 A segmented display of color high dynamicrange image
生成彩色高动态范围图像,需要首先对各个颜色通道图像进行动态范围延展,应用标定的三通道系统相对响应函数,将图4的9帧图像融合成高动态范围图像,三通道的高动态范围图像如图6所示。
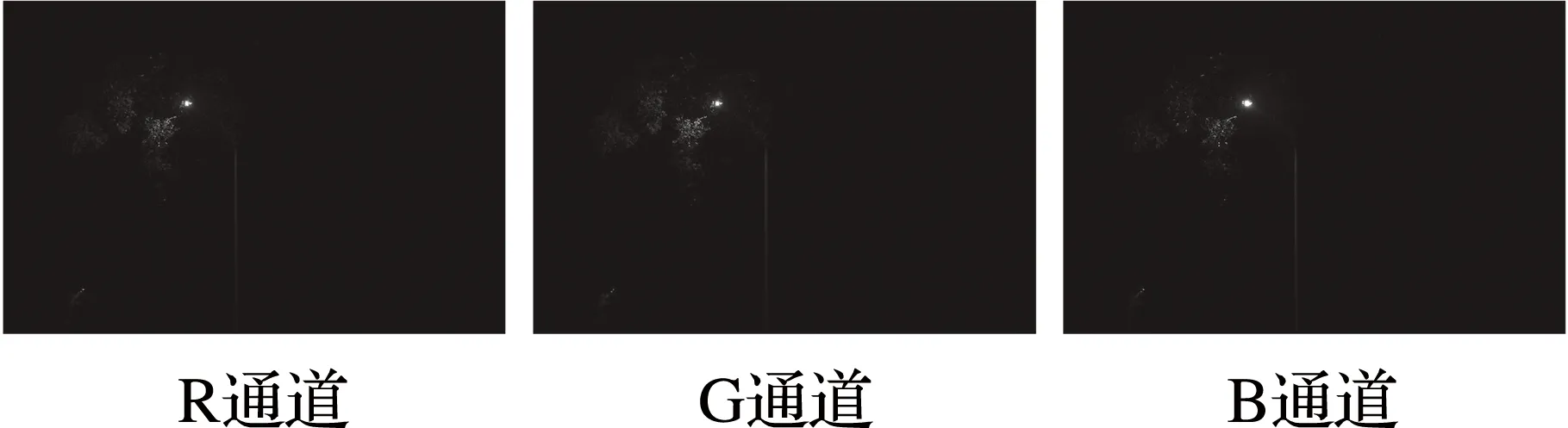
图6 三通道高动态范围的图像Fig.6 The HDR images of three channels
3.3 高动态范围图像的非均匀校正
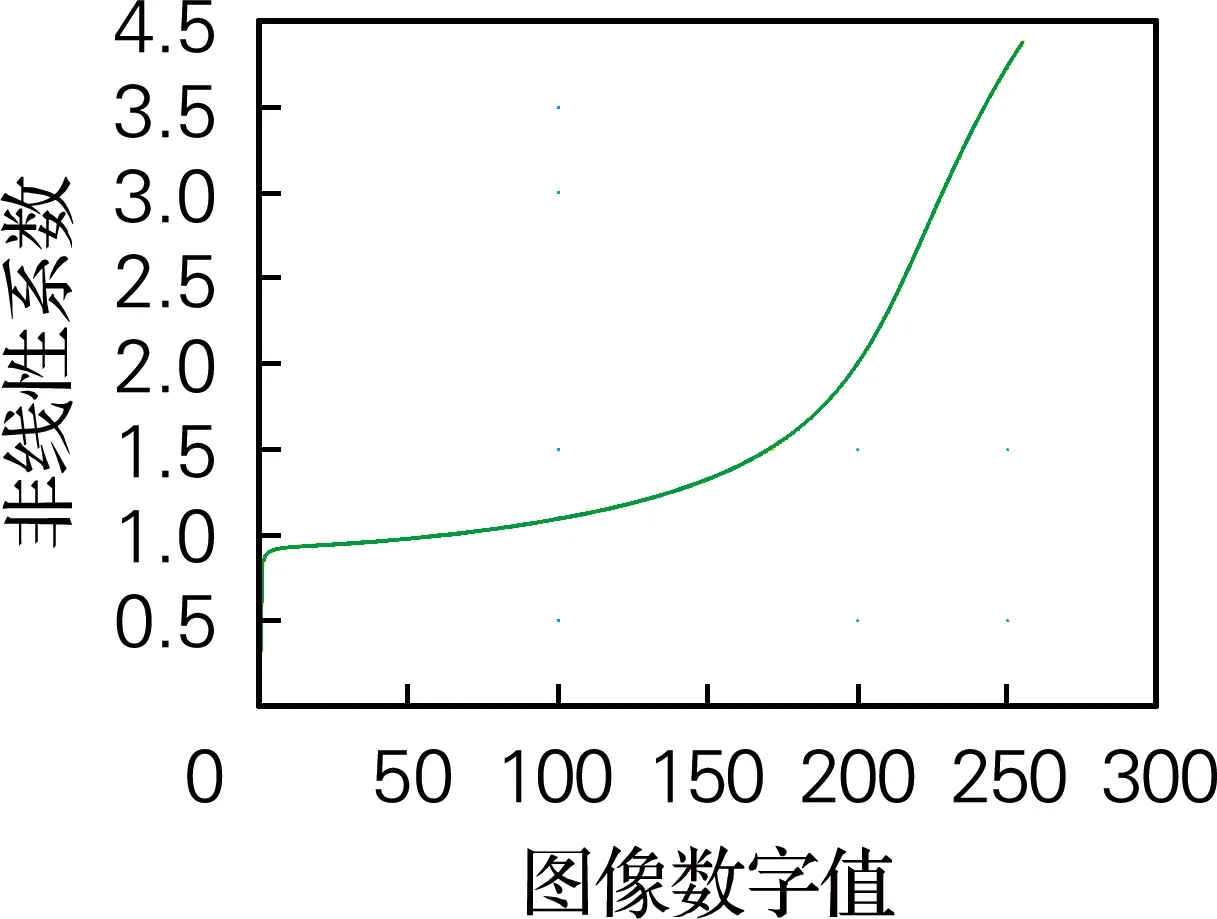
对生成三通道高动态图像数据进行非均匀校正,校正前后的粗糙度对比如表1所示。方差分析统计F比情况如表2所示。可见,校正前后三通道高动态范围图像的粗糙度平均增大6.81%,方差分析统计F比平均减小了9.87%,非均匀性明显减小。
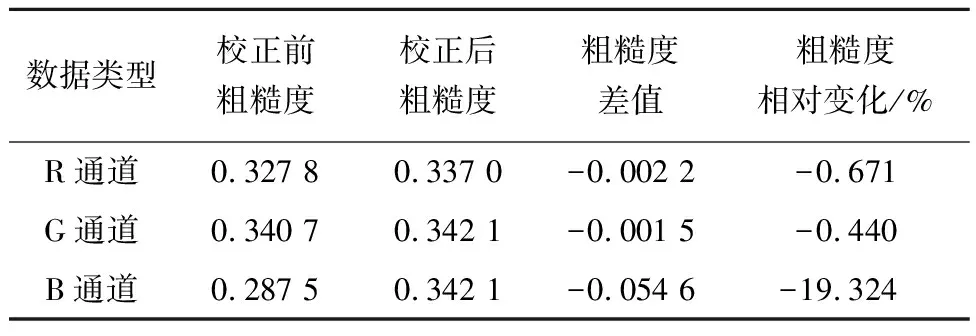
表1 校正前后的粗糙度差异Tab.1 Roughness difference before and after correction
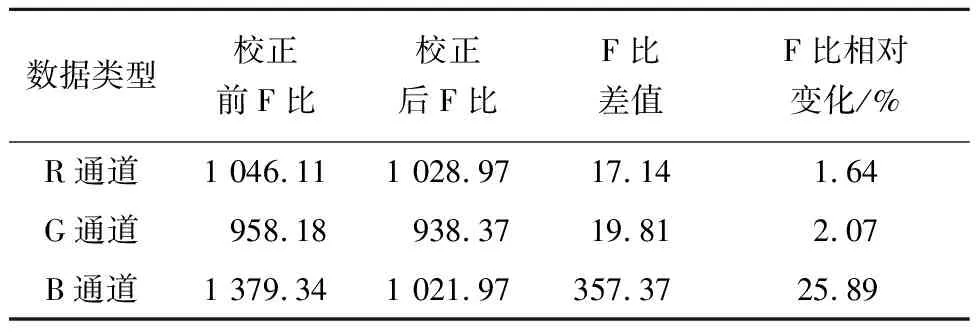
表2 校正前后的统计F比差异Tab.2 Statistical F ratio before and after correction
进一步对校正后的图像重新合成彩色图像如图7(a)所示。图7(b)给出了校正前后的RGB彩色高动态范围图像的差值图。可以明显看出,校正前后存在明显的颜色差异,可见系统响应非均匀性产生了明显的色差,即系统响应非均匀性对于彩色成像系统的色度特征化影响较大。校正系统响应非均匀性,可以减小高动态范围彩色图像的色差。
(a) 校正图像
(b) 差值图图7 非均匀校正图像及校正前后数据差的彩色图Fig.7 Nonuniformity correction image and color imagewith data difference before and after correction
4 结 论
本研究提出了一种彩色高动态范围图像的非均匀性校正方法,方法针对高动态范围场景的彩色成像和基于成像的高动态范围色度测量。在两点平场定标法的基础上,面向彩色图像的特点,建立了高动态范围图像的校正模型,应用夜间路灯照明场景对方法进行了验证,结果表明方法可以降低高动态范围图像非均匀性,从而减小来自非均匀性带来色差。