变电站挂轨机器人智能巡检系统技术研究
2021-10-11李新海徐宝军肖星曾令诚罗其锋刘德志凌霞罗海鑫
李新海,徐宝军,肖星,曾令诚,罗其锋,刘德志,凌霞,罗海鑫
(广东电网有限责任公司中山供电局,广东中山528400)
变电站是电力系统的重要组成部分,变电设备可靠运行对保障电力系统安全稳定运行有着重要意义。对变电设备进行巡检、及时发现设备缺陷隐患并消缺是保障电网安全稳定运行、提高供电可靠性的常规基础工作[1-3]。目前电网企业普遍采用人工方式,通过运行人员对变电设备进行定期巡检或特殊巡检。人工巡检作业需要运行人员近距离看、听、闻、嗅,作业时需携带大量的检测仪器,存在劳动强度大、工作效率低、人身安全无保障、人机工效差等问题,同时受运行人员素质、恶劣气候条件影响,巡检质量不稳定,管理成本高,容易产生漏判、误判[4-5]。随着机器人技术的发展,变电站采用机器人巡检可以弥补人工巡检的不足,为解决上述问题提供了新的途径[6]。
从20世纪80年代开始国内外对变电站机器人巡检技术陆续开展了研究。日本在20世纪90年代利用红外传感器技术研制了500 kV变电站有轨巡检机器人,实现了对变电设备温度的自动测量[7-8]。2008年巴西圣保罗大学研制高空轨道机器人实现对变电设备异常发热进行红外线热成像测温[9]。2002年我国在国家863计划的支持下开展变电站设备巡检机器人的研究并成功制造出第1台变电站巡检机器人[10-11]。但由于相关技术的限制,机器人巡检未在变电站大规模推广应用。
近年来,随着计算机性能的大幅提升以及通信技术、人工智能技术、高清摄像技术、图像识别技术、红外测温技术的发展,机器人巡检代替人工巡检已成为变电设备巡检的发展方向。目前巡检机器人按行走方式主要分为轨道式、轮式和履带式三种机器人[12]。由于城市用地的紧张,室内六氟化硫封闭式组合电器(gas insulated switch⁃gear,GIS)变电站取代传统的敞开式变电站已成为主流[13]。室内变电站继电保护室、GIS室、高压室等设备室存在设备众多、空间狭小、布局复杂等问题,导致轮式、履带式以及地面轨道式机器人因巡检角度难以对室内设备进行全方位巡检,同时因室内设备阻挡导致无线通讯质量不佳,进而影响了机器人自动导航和信息通讯。
为实现机器人巡检室内变电设备功能,本文提出并研制了变电站挂轨机器人智能巡检系统,通过在变电站设备室内安装吊顶轨道,将机器人挂轨在该轨道上实现无障碍行走,从而定点对变电设备的空气开关、压板、指示灯、把手、表计、端子排、套管、接线掌、高压柜等设备元件进行人工智能图像识别、红外测温、局放信息采集等功能巡检。该系统可代替人工巡检,降低了运行人员的劳动强度,提升了巡检效率和巡检质量,可智能诊断设备隐患并预警变电运行人员进行消缺,确保变电设备安全可靠运行。
1 变电站挂轨机器人智能巡检系统结构与功能设计
1.1 系统结构设计
变电站挂轨机器人智能巡检系统由后台主机、各设备室挂轨机器人就地管理装置及各设备室的挂轨机器人组成,系统结构如图1所示。
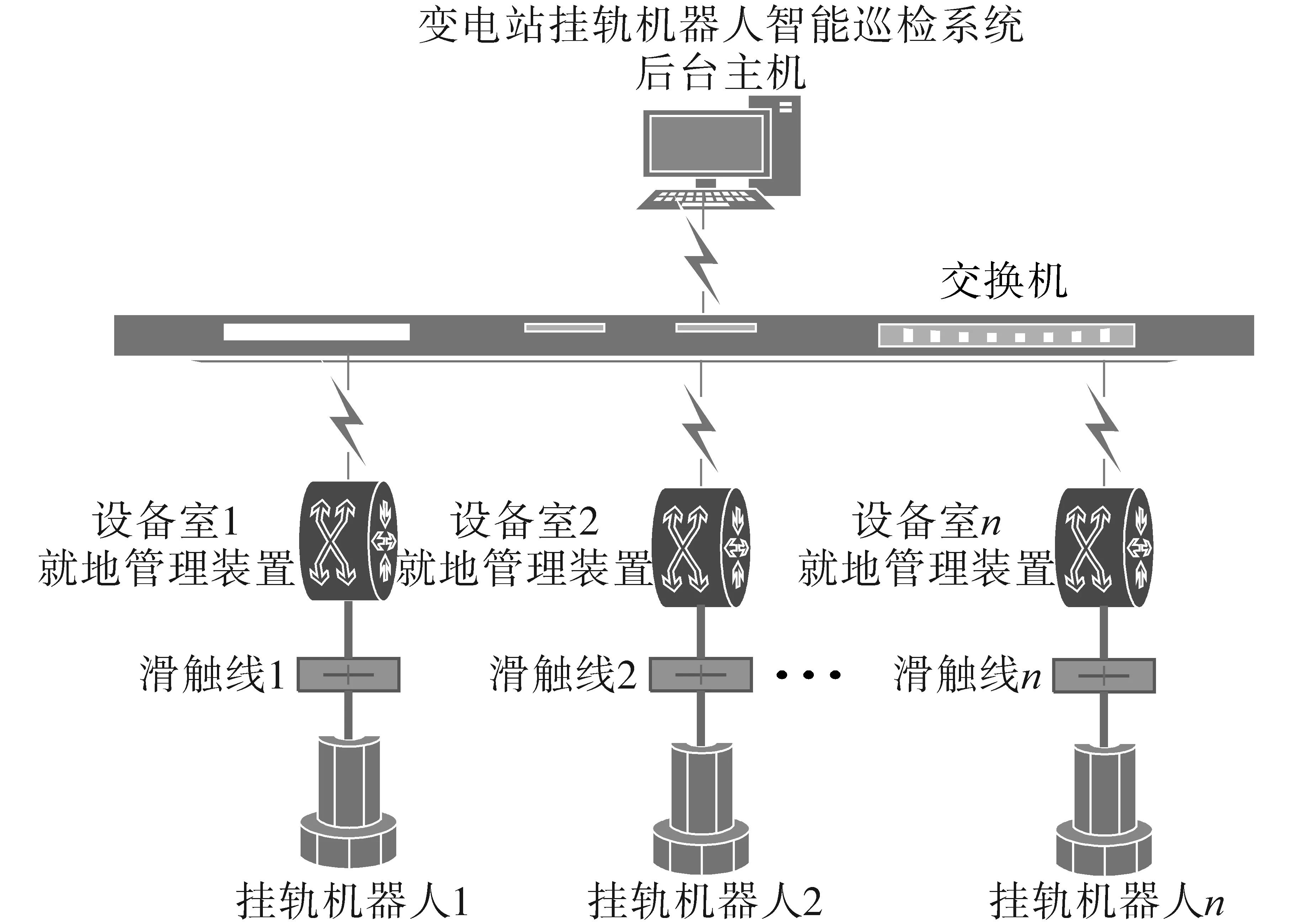
图1 变电站挂轨机器人智能巡检系统结构图Fig.1 Structural diagram of the track-hanging robot intelligent inspection system in substation
系统后台主机通过就地管理装置实现对各设备室机器人的控制、管理,对机器人发布巡检任务和巡检路线。各设备室机器人通过就地管理装置将采集到的可见光图片信息、红外测温信息、局放信息上传到系统后台主机。系统后台主机对机器人上传的信息进行存储、分析、智能诊断、预警设备隐患,生成巡检报告并制定运维检修策略,为设备运维检修提供决策依据。
系统主要采用有线通信,系统后台主机利用交换机通过以太网接入各设备室就地管理装置内载波模块,就地管理装置内载波模块利用滑触线接入挂轨机器人内的载波模块,挂轨机器人的主机以及检测仪器通过以太网接入本体载波模块,从而实现系统后台主机与挂轨机器人数据交互。系统传输带宽不小于60 Mbps,保证了可见光高清图片、红外测温图片、巡检任务等数据的实时可靠传输。挂轨机器人智能巡检系统还提供远程数据访问接口,支持远程系统浏览机器人采集的数据信息。
1.2 系统功能设计
1.2.1 系统后台主机功能设计
系统后台主机实现对各设备室内机器人的巡检管理,主要功能如下:
1)编辑、制定巡检任务并发布给机器人。
2)制定与巡检任务相对应的机器人巡检路线并发布给机器人,能实时监视机器人的位置。
3)与机器人进行数据交互,收集机器人采集的红外测温图片、可见光图片和局放信息,并进行存档。
4)对采集的信息进行智能诊断分析并自动生成设备缺陷报表,一键生成巡检报告并具有打印、导出功能。
5)对巡检发现的设备缺陷、机器人本体故障以及通讯中断等异常情况生成告警信息,可语音报警并短信通知运维人员进行维护、消缺。
6)具有巡检策略管理、告警定值管理、设备状态趋势分析、报表统计、历史查询等功能。
1.2.2 就地管理装置功能设计
挂轨机器人就地管理装置主要由220 V交流电源切换模块、整流模块、载波模块组成,每个设备室的就地管理装置都有独立的IP地址,具有承上启下功能。
就地管理装置通过滑触线为机器人提供工作电源,同时利用滑触线作为载波通道与机器人通讯,向机器人发布巡检命令并接收机器人发送过来的巡检信息。就地管理装置与系统后台主机通过以太网连接,接收系统发布的各种控制信息以及将接收的巡检数据信息上传到系统后台主机。
1.2.3 轨道功能设计
挂轨机器人需沿轨道行驶到达巡检目标。轨道需承载挂轨机器人重量,机器人重量约为50 kg,即要求轨道具备足够刚度,以保障机器人长期行驶而轨道不变形。轨道安装需满足机器人平滑顺畅行驶以及对巡检设备从上至下全方位巡检。
为满足挂轨机器人的行驶要求,即能适应各种不同布局的设备室,本文设计的轨道采用高强度铝合金材料制作的直轨与弯轨拼接吊顶安装而成。该轨道通过可调节的吊顶固定装置来固定安装,从而保证轨道安装高度适宜且水平。轨道的形状可由直轨与弯轨拼接成单线型轨道或交叉型轨道。吊顶固定装置主要由吊顶固定构件、可调节高度构件、水平调节底座、轨道水平固定构件等组成。吊顶固定构件通过拉爆螺丝将其固定在室内天花板上,通过调整可调节高度构件可使轨道安装高度满足挂轨机器人运行要求,通过调整水平调节底座的调节螺杆两端螺母可调节轨道水平。
1.2.4 供电及通讯系统功能设计
机器人行驶以及检测设备工作需要工作电源,目前主要采用电池或滑触线供电两种方式。机器人采用电池供电方式需使用大容量电池来保证电池的续航能力,同时还需建立配套的充电管理系统以及定期对电池维护,因此机器人采用电池供电方式将增加建设成本,同时也增大机器人本体的体积及重量,不利于挂轨机器人智能巡检系统的建设。挂轨机器人采用滑触线供电方式可保证不间断供电,机器人本体无需安装大容量电池,减小了机器人本体的体积及重量,起到了节能降耗作用。
本文设计的挂轨机器人采用滑触线供电,滑触线安装在轨道上方,实现了不间断供电,解决了因电池电量不足而导致机器人无法完成巡检任务的问题。同时滑触线实现了就地管理装置与机器人本体的有线连接,利用滑触线作为载波通信通道实现与系统后台主机的通讯功能,无需再额外安装有线通讯线路或无线通讯装置。
1.2.5 挂轨机器人功能设计
挂轨机器人具备自动行驶、定位、信息采集、数据交互功能。机器人本体的集电装置可实时在滑触线上取得工作电源并建立载波通信通道实现通讯功能。集电装置采用双电刷并排安装方式,挂轨机器人直行时两电刷平面同时与滑触线接触,挂轨机器人进行内、外弯转弯时,两电刷有效配合,保持圆弧面或平面与滑触线表面有效接触。挂轨机器人底盘采用轮式结构在轨道上行驶,利用码盘与定位标签共同实现精确定点停靠功能。机器人根据巡检任务自动定点停靠在巡检目标前,伸缩臂自动伸缩控制云台高度,云台自动调整角度后对焦进行可见光图片、红外测温图片拍摄及局放信息采集。机器人利用滑触线作为载波通道将采集的数据发送至系统后台主机进行智能诊断分析以判断巡检设备是否正常,同时还将机器人自检的故障信息上传至系统后台主机以通知运维人员进行维护、消缺。
2 变电站挂轨机器人智能巡检系统关键技术
2.1 挂轨行驶驱动技术
挂轨机器人底盘采用轮式结构,其主要由电机、1个驱动轮、4组导向轮、4个弹簧装置以及定位标签读取装置组成。驱动轮安装在导轨下方紧贴导轨,电机拖动驱动轮行驶,驱动轮上装有计算行程的码盘用以记录机器人的行驶距离。定位标签读取装置可快速识别轨道上的定位标签信息,及时修正机器人当前的位置信息。4组导向轮分别安装在轨道上、下两侧,上方的导向轮压在导轨上以支撑整个机器人。轨道上方的导向轮旁并排安装了一个弹簧装置,利用轨道外侧弹簧与内侧弹簧的水平压缩力调整驱动轮方向实现弯道转弯,保障机器人在弯道上平滑行驶。
挂轨机器人通过控制电机转速实现了挂轨机器人行驶控制策略,可减小运动惯性引起的定位误差。挂轨机器人行驶控制策略逻辑如图2所示,挂轨机器人启动时首先根据巡检路线判断目标距离并控制行驶速度,距离巡检目标有超过2个定位标签时挂轨机器人快速行驶达到正常行驶速度,在经过与巡检目标最近的第2个定位标签时,挂轨机器人自动将行驶速度控制为正常速度的50%,在经过与巡检目标最近的一个定位标签时,挂轨机器人自动将行驶速度控制为正常速度的20%,到达巡检目标时即发停止制动命令。

图2 挂轨机器人行驶控制策略逻辑图Fig.2 Logic diagram of the control strategy of the track-hanging robot
2.2 巡检定位技术
挂轨机器人沿轨道行驶,通过码盘进行测距和定位,同时通过轨道上的定位标签对码盘测距进行校准,实现精确定点停靠。轨道上装设的定位标签,可采用二维码、磁条、射频识别(radio fre⁃quency identification,RFID)等技术[14-15]。根据各设备室巡检对象的间隔,选取合适间距在轨道上精确安装定位标签,配合安装在挂轨机器人本体的定位标签读取装置,可实现测距、校准功能。
系统对挂轨机器人所在设备室的轨道、定位标签、设备位置进行巡检模型建模。进行巡检工作前在系统后台主机建立巡检任务,并在建好的巡检模型中自动计算当前机器人与各巡检目标的距离,自动规划、生成并发布最优巡检路线。机器人接收到的巡检任务及最优巡检路线后自动开展巡检工作,通过码盘实时测距并上送至后台主机形成巡检轨迹记录,机器人经过定位标签时自动修正位置信息、码盘测距结果并进行码盘测距校准,经行驶预定距离后定点到达巡检目标位置,自动开展巡检工作。挂轨机器人巡检定位流程如图3所示。
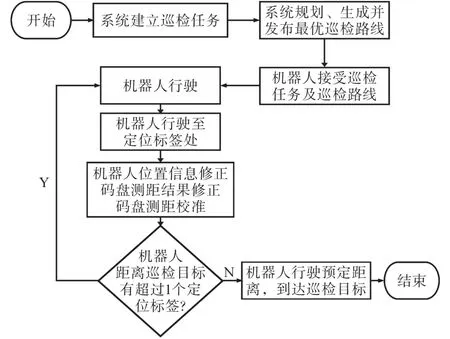
图3 挂轨机器人巡检定位流程图Fig.3 Inspection positioning flowchart of track-hanging robot
2.3 自动采集信息技术
系统对设备室内每个巡检目标的不同部位进行巡检任务建模。每个巡检目标中包含多个子设备,如装置本体、压板、空气开关等。系统后台主机根据巡检规范要求选择安排子设备的巡检项目,如是否拍摄可见光图片、是否进行红外测温、是否收集局放信息等。每个子设备任务中还包含了挂轨机器人伸缩臂长度控制以及全向云台检测仪器采集角度控制。机器人按巡检路线达到巡检目标前,根据巡检任务自动调整伸缩臂长度,自动控制全向云台将检测仪器调整至预定采集角度,再进行相关拍摄、测温、局放检测后将采集信息上传至系统后台主机,从而实现了挂轨机器人巡检信息的自动采集。
2.4 红外防碰撞技术
系统采用了防碰撞技术防止挂轨机器人工作或行驶过程中误碰障碍物而损坏设备。因红外传感器具有功耗低、结构简单、体积小、成本低廉、精度高等优点,同时不受电磁波及周围可见光的影响[16-18],故在挂轨机器人上安装了红外传感器以实现防碰撞功能。挂轨机器人工作或行驶过程中定时向周围发射红外线,碰到障碍物后反射回机器人接收,根据红外线发射及接收的时间以及红外线的传播速度即可计算挂轨机器人与障碍物之间的距离。当检测机器人与前方障碍物的距离小于设定值时,机器人即向驱动轮的电机控制器发送停车命令并向系统后台主站发送告警信号,驱动轮将停止行驶。当检测机器人与下方障碍物的距离小于设定值时,机器人即向伸缩控制器发送停止伸长命令并向系统后台主站发送告警信号,伸缩臂将停止向下伸长。运行人员收到告警信号后需到现场清除障碍物,待障碍物被清除,机器人检测到无障碍物后可继续行驶或工作。挂轨机器人防碰撞技术逻辑如图4所示。
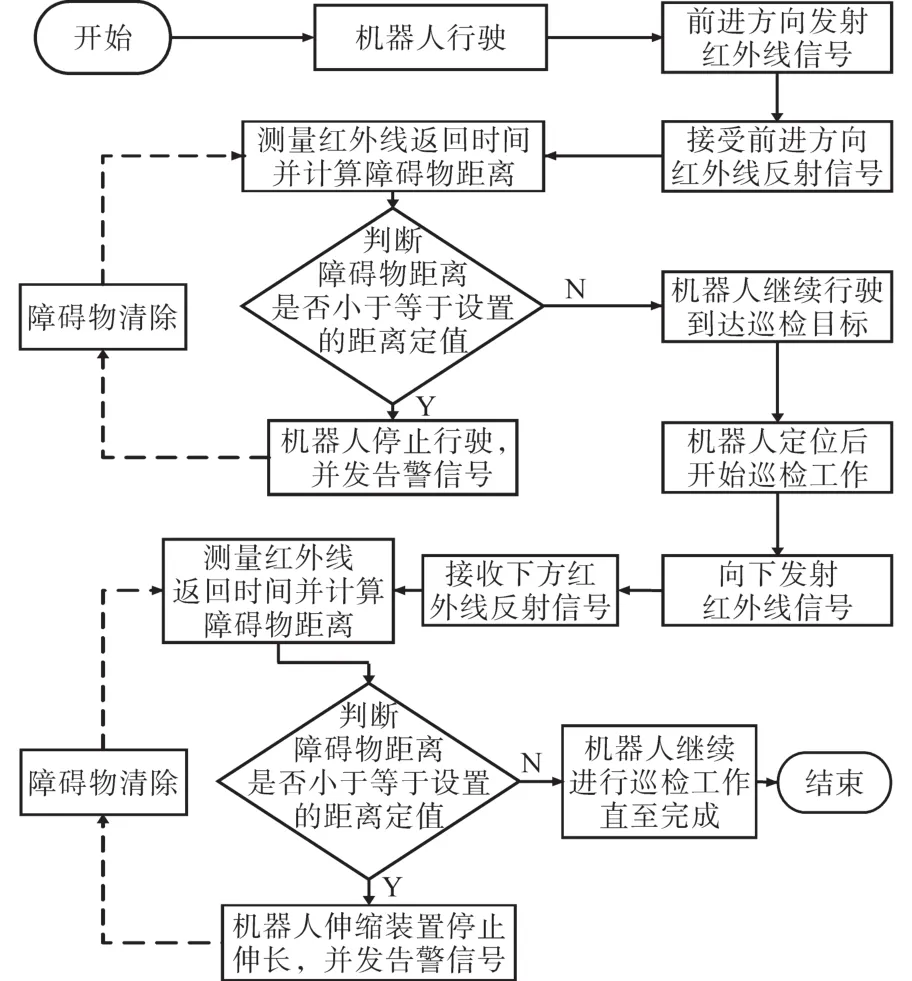
图4 挂轨机器人防碰撞技术逻辑图Fig.4 Logic diagram of anti-collision technology for track-hanging robots
2.5 直流载波通信技术
设备室内的挂轨机器人与就地管理装置之间采用了直流载波通信技术实现数据交互通讯功能,滑触线不仅为机器人提供工作电源,同时兼作信号通讯线。在以太网传输的信号加载到滑触线上之前,需利用数字频率调制技术(fre⁃quency shift keying,FSK)将发送的信号进行调制。数字频率调制技术容易实现,抗噪声和抗衰减性能较强,有助于提高通讯系统的稳定性[19-20]。挂轨机器人智能巡检系统直流载波通信如图5所示。

图5 变电站挂轨机器人智能巡检系统直流载波通信图Fig.5 DC carrier communication diagram of track-hanging robot intelligent inspection system in substation
就地管理装置采用双电源切换的工作模式来提高供电可靠性,两路交流电源AC 220 V进线经切换继电器切换后进入整流模块,由整流模块整流输出DC 36 V,为滑触线提供工作电源。机器人的集电装置从滑触线上取得工作电源来保证各个部件的正常电源供应。就地管理装置以及机器人本体分别安装了载波模块以实现数字信号与高频模拟信号的调制。发送信号端的载波模块将以太网传输来的数字信号调制成36.8 kHz高频信号后耦合到直流滑触线上进行传输,接收信号端的载波模块将从直流滑触线上接收到的36.8 kHz高频信号解调成数字信号后通过以太网传输,最终实现了系统后台主机与挂轨机器人之间的数据交互通讯。就地管理装置以及机器人本体内部直流电源接入处均安装了阻波电感L,确保高频载波信号全部进入载波模块内,从而减少了高频信号衰减,提高了载波通信的可靠性。
3 应用实例
3.1 现场实施与效果
500 kV文山变电站是南方电网首座500 kV户内GIS变电站,也是南方电网智能技术应用示范点。500 kV文山变电站目前安装500 kV变压器2台、500 kV线路4条、220 kV线路8条以及相关二次设备,其设备主要分布在500 kV GIS室、220 kV GIS室、主变及35 kV设备高压场、继电保护室等4个区域。其中220 kV GIS室有220 kV线路、主变、电压互感器(potential transformer,PT)、母联、分段等间隔设备共18个,继电保护室有保护、测控、通信等屏柜共182面。按照广东电网公司《变电设备运维策略实施细则》对500 kV变电站设备的巡检要求,变电运行人员需对上述设备开展每日1次的日常巡检和每月1次的全面巡检,巡检任务繁重,耗时较长。
2018年12月,本文研制的变电站挂轨机器人智能巡检系统已安装应用于500 kV文山变电站,在220 kV GIS室、继电保护室分别安装了挂轨机器人,实现了上述设备的智能巡检功能。该系统按“每月1次人工全面巡检标准”开展每日1巡,采集设备可见光高清图像、红外测温图像等数据,进行人工智能分析并生成巡检报告,预警设备存在的缺陷隐患,为变电设备运维检修提供决策依据。
图6为500 kV文山变电站挂轨机器人智能巡检系统后台主机自定义继电保护室500 kV狮文乙线主Ⅱ保护屏压板巡检任务界面,变电站运行人员可按巡检工作要求自定义巡检任务及巡检内容。

图6 挂轨机器人智能巡检系统自定义巡检任务界面Fig.6 Customized inspection task interface for the trackhanging robot intelligent inspection system
图7为500 kV文山变电站继电保护室挂轨机器人现场巡检工作画面,该机器人按系统发布的巡检任务、巡检路线在500 kV狮文乙线主Ⅱ保护屏前开展压板巡检工作。

图7 继电保护室挂轨机器人现场巡检工作画面Fig.7 On-site inspection work picture of trackhanging robot in relay protection room
截止到2019年12月,500 kV文山变电站利用挂轨机器人智能巡检系统按照《变电设备运维策略实施细则》要求对220 kV GIS室、继电保护室实施了挂轨机器人巡检。表1为挂轨机器人巡检与人工巡检的内容及时间对比表。由表1数据测算,利用挂轨机器人代替人工巡检,每月至少可节省人工173工时,每年可节省人工2 076工时。该系统的应用将文山站运行人员从繁重的巡检任务中解放了出来,可更好地投入到设备运维工作中,有效提升了500 kV文山变电站设备运维水平。

表1 挂轨机器人巡检与人工巡检的内容及时间对比表Tab.1 Comparison table of content and time of track-hanging robot inspection and manual inspection
3.2 应用问题与解决措施
1)挂轨机器人掉电重启或通讯中断后的定位失效问题。挂轨机器人本体在掉电或与后台通讯中断过程中挂轨机器人无法识别或上传定位信息,此时如果机器人因某种原因移动位置而码盘测距失效将造成挂轨机器人位置定位失效。500 kV文山变电站挂轨机器人智能巡检系统设置了掉电重启与通讯恢复后机器人的位置定位策略,即掉电重启或通讯恢复后机器人自动沿轨道行走至相邻定位标签,读取定位标签信息并上传到后台主机,从而完成掉电重启或通讯中断后挂轨机器人位置定位。
2)挂轨机器人定位精度控制问题。500 kV文山变电站挂轨机器人智能巡检系统后台主机建立了挂轨机器人所在设备室的轨道模型、巡检目标模型、机器臂的伸缩长度及仪器拍摄角度等模型,要求挂轨机器人精准到达巡检目标位置后开展巡检工作,确保采集的图像信息满足后台主机识别要求并与模型图库进行有效比对。挂轨机器人在定位标签间的位置采用码盘测距进行定位,按照本文“2.2节巡检定位技术”要求需选取合适的距离安装定位标签。经测试,在轨道上按每间隔3 m设置一个定位标签可使机器人到达位置与巡检目标位置的定位误差控制在2~3 cm以内,满足了巡检定位精度控制要求。
3)挂轨机器人弯道行驶稳定控制问题。500 kV文山变电站挂轨机器人采用S型悬挂轨道,挂轨机器人重量达50 kg,机器人在高速转弯行驶过程中由于惯性大导致机器人本体出现大幅晃动,对挂轨机器人驱动机构和轨道造成严重损害。为保障机器人弯道行驶时的稳定性,该系统在轨道弯道两端前设置了弯道定位标签,机器人驶入挂轨弯道前首次读取弯道标签后即减速行驶,随后机器人慢速、稳定通过挂轨弯道,驶出挂轨弯道并再次读取弯道标签后再恢复正常速度行驶。
4 结论
本文基于挂轨行驶驱动技术、巡检定位技术、自动采集信息技术、红外防碰撞技术、直流载波通信技术等关键技术,研制了变电站挂轨机器人智能巡检系统,实现了在空间狭小复杂的变电站设备室内的机器人智能巡检功能。
该系统可代替人工巡检设备,减轻了运行人员的工作负担,保障了运行人员的人身安全,可及时发现设备缺陷隐患并预警通知运维人员维护、消缺,有效地提升了变电设备运维工作质量和效率。该系统在500 kV文山变电站的应用验证了系统的实用性及有效性,对变电站机器人智能巡检技术发展有着积极推动作用。