基于多项式拟合的目标航迹维持∗
2021-10-11卢其龙左玉东
蒋 敏 卢其龙 左玉东
(91913部队 大连 116041)
1 引言
雷达对低空掠海飞行目标进行跟踪时,由于受海杂波、多径效应等因素的影响,会引起信号的衰落,信噪比降低,从而影响跟踪的稳定性[1]。为有效解决信号衰落的影响,使雷达保持连续跟踪,一般会从系统硬件以及软件处理方法和策略采取措施提升系统的杂波抑制能力及弱目标检测能力。如通过灵敏度时间控制电路(STC)和自动增益控制电路(AGC)进一步拓展接收机总的动态范围,防止接收机过载,更好地发现和检测小目标;波形产生、信号处理等方面均采用开放式设计,灵活支持参数化配置;通过数据处理手段采取措施,对雷达在“记忆跟踪”阶段的航迹预测和航迹关联进行更精细化的处理[2]。文章采取软件算法方面的措施,运用多项式拟合的方法,根据目标在丢失之前的位置、距离、速度、角度等信息进行航迹预测,当雷达处于失锁状态时可根据预测的轨迹进行跟踪,直至目标出现后重新进行捕获,从而保持稳定、连续的跟踪。
2 问题分析与建模
2.1 难点分析
雷达在跟踪低空飞行目标时,多种因素会导致目标丢失的情况,例如设备发生故障、操作手失误、目标运动姿态变化、环境因素干扰等,在排除人为和设备等因素外,在跟踪阶段,以下四种因素会导致跟踪难度增大,严重情况下特别是没有外部引导数据时很容易丢失目标,导致雷达失锁,具体分析如下。
1)海杂波
目标散射回来的回波信号与海杂波混在一起时,通常采用过门限检测法对目标回波进行检测,即当信号超过判决门限时,便确定为目标回波,反之便确定为杂波,如果杂波信号过强,与回波信号相差不大并且超过判决门限时,便确定为目标回波。强海杂波会使雷达检测门限提高,造成目标难以检测,导致跟踪不连续,同时海杂波具有变化无规律、性质难把握等特点,并且与海域、气象及季节等均有关系,常常呈现出突然产生的极强回波,雷达信号处理单元在处理这种突然产生的极强回波时就会造成较大的虚警[3]。另外,雷达天线受海杂波影响时会出现天线抖动,极端情况下,由于抖动过大,会使得天线进入限位区,严重时天线无法退出限位,导致雷达无法继续跟踪目标。
2)多径效应
多径效应是由于不同路径的信号(相互干涉的直射波和反射波)到达接收机的时间不同,按各自的相位相互叠加而造成干扰,此时目标回波进入雷达接收机后,会引起电磁波回波能量起伏剧烈,有时甚至对消,导致测量雷达在某些距离段对目标回波衰减或增强,影响雷达对目标的检测性能,导致目标丢失,严重情况下会导致天线飞车[4]。同时,由于雷达探测的目标高度很低(最低飞行高度3m~5m)及距离较远,测量雷达必须在极小仰角(雷达架高低于目标高度)甚至在负仰角(雷达架高大于目标高度)下工作,在这种情况下,存在的多路径效应会使测角误差明显加大甚至无法跟踪目标。
3)海上固定目标影响
一方面是由环境遮挡引起,环境遮挡是指在某个方位角度上,测控装备与目标之间存在遮挡物,遮挡物遮挡了雷达的跟踪视线(电轴),影响雷达对目标的捕获跟踪。一些大型的岛屿还有可能在较长时间内对目标形成遮蔽,当目标即将进入遮挡区时,电磁波信号会逐渐减弱直至消失,影响雷达连续跟踪[5]。另一方面,目标在掠海飞行过程中,当探测海域存在较多的海上钻井平台及岛屿等固定目标时,这些固定目标的反射信号会强于飞行目标的反射信号,接收机对回波信号进行处理时很难将目标信息从微弱的回波信号中提取出来,会进一步影响雷达对小目标的探测。
4)飞行目标运动姿态和轨迹变化
飞行目标运动姿态、运行轨迹等因素会影响雷达对目标信号的检测。目标在掠海飞行时,如发生转弯、爬升、俯冲等动作,那么被雷达波照射的方位会发生变化,其RCS也将随目标对雷达的相对姿态的不同也会发生变化,并且回波时间序列呈现强弱起伏,起伏特性随目标的形状和尺寸而异,在这种情况下,雷达对目标进行跟踪时其AGC电压会发生变化,会影响雷达的稳定跟踪[6]。目标运动轨迹主要表现在过航截点,当掠海飞行的目标过航捷(特别是远距离大航路捷径的情况)时,其径速很低甚至接近于零,从频谱上很难与杂波进行区分,由天线主瓣或副瓣进入的与处于相同距离单元的地∕海面杂波、海上孤立强点杂波等会严重影响目标的检测,导致目标跟踪航迹质量下降甚至发生目标丢失,不利于任务的整体态势显示及精度统计。
2.2 可行性分析
以上四种因素是雷达在低仰角跟踪时比较常见的难点问题,虽然某些外界因素会导致目标信噪比降低直至雷达失锁,但是可以根据一定的客观条件和处理数据方法使雷达保持继续跟踪,确保雷达在失锁阶段跟踪的连续性,待目标出现后重新进行捕获,具体的可行性分析如下。
1)实时记录的大数据提供了客观基础
雷达在对目标进行跟踪测量时,是采用边跟踪边记录的方法,记录的频率一般可达到20Hz,即每50ms记录一组数据。因此,跟踪一段时间后记录的目标运动信息(时间、空间坐标、距离、速度、方位、俯仰)为航迹预测提供了大量、高速、多样、精确的第一手资料。通过这些数据,可以实时地显示目标的运行轨迹特点和运动特征,大数据无需人为的调查和搜集,只需通过对目标航迹数据的不断积累,运用一定的算法将记录的信息提取出来,建立数据模型,从时间、距离、空间状态等方面进行信息处理,从而获取目标在丢失阶段的航迹信息,不存在时间滞后性。
2)目标的运动特性提供了现实可能性
基于历史航迹的预测方法是指利用一段时间内已估计出的目标历史运动信息,来预测目标在下一时刻或下一段时间的位置。当雷达失锁时,目标丢失大部分特征信息,此时它最可靠的信息是目标之前的运动信息,因为目标运动存在惯性,它的运动速度和加速度在短时间内一般不会发生很大变化[7]。这种算法假定目标运动遵从一定的规律,利用一段时间内的历史运动信息可以推测出目标在某一时刻的位置,从而充分利用以往和当前信息维持航迹的连续性并正确引导距离波门、速度波门和天线波束进行实时调整,当目标飞出遮蔽区或回波信号在时域∕频域可以与杂波进行分辨时,可立即恢复精跟踪状态,避免了重新捕获目标造成的数据不连续以及无法截获目标的问题。
3)曲线拟合的方法揭示了目标运动趋势
根据已有的雷达测量数据,来预测在雷达失锁时航迹,需要用合适的函数来逼近(或拟合)已知的测量数据[8]。这种逼近的特点是:适度的精度是需要的;允许数据有一定范围的误差;可以预测将来某一时刻或某一段时间的变化特征或趋势。逼近离散数据的基本方法就是曲线拟合,数据拟合的目的是最小化误差函数,故常采用最小二乘拟合。在跟踪阶段,由于空中飞行目标的运动轨迹是平滑的,并且运用数据拟合可以消除随机误差对目标速度及航向的估计偏差,具有较好的数值收敛性和稳定性,因此可以选取适当的多项式对已知的历史测量数据进行拟合,拟合的结果符合目标的运动趋势和特点。
2.3 模型建立
基于以上可行性分析,根据已有的大数据和航迹信息,为了提高预测的准确性,采用m次多项式拟合方法对目标历史航迹进行逼近,以消除随机误差对目标速度及航向的估计偏差,随后再利用递推方式实现目标航迹的实时预测。
3 应用举例
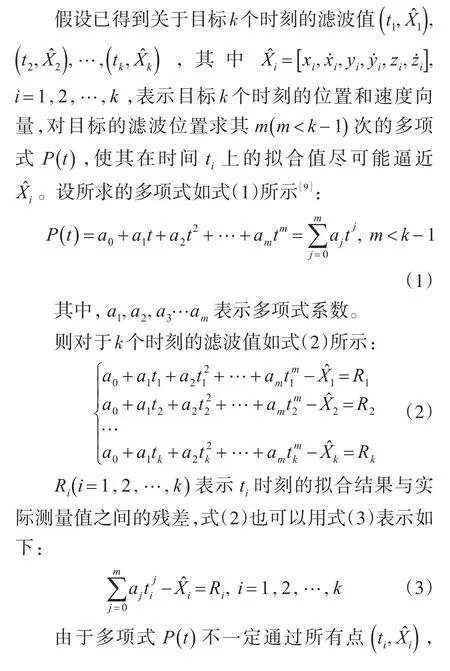
雷达在某次跟踪低空飞行目标时,在200s时雷达失锁,根据目标在雷达界面的轨迹显示,目标在200s左右时处于过航截点附近,并且处于远距离大航路捷径,其径速很低甚至接近于零。因此,雷达失锁的原因很有可能是受到由天线主瓣进入的与处于相同距离单元的海上孤立强点的杂波影响,导致目标丢失[11]。假设在前200s的目标的方位角度变化如图1所示。
图1 目标前200s方位角度变化曲线
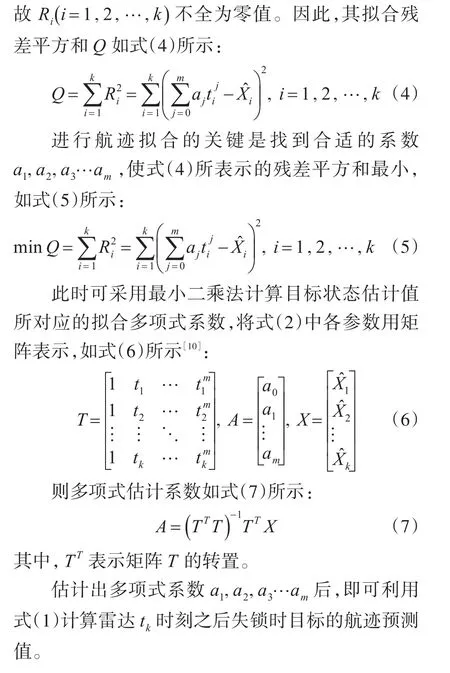
同时,根据目标过航截点的轨迹特点,在200s后目标的俯仰角度和距离在短时间内不会发生变化,为使雷达保持稳定、连续的跟踪,此时需要对雷达失锁时(航截点附近)目标的方位角度进行预测。根据图1目标在前200s的飞行轨迹,同时运用式(7)求多项式系数的方法,采用三次多项式进行拟合,用来预测在雷达失锁后20s的目标方位角度变化趋势,结果如图2所示[12]。
图2 雷达失锁后目标方位角度变化趋势
根据图2拟合的结果来看,航迹预测的拟合效果较好,拟合结果不仅与前200s目标方位角度大体一致,还可以预测雷达失锁后20s目标方位角度变化情况,根据对目标方位角度的拟合和预测,结合过航截点时的目标距离和俯仰角度,便可以对目标进行精准定位,从而实现目标航迹的维持和雷达的稳定跟踪。
4 结语
文章运用了多项式拟合的方法对目标的航迹进行预测,可以在雷达失锁时对目标保持稳定的跟踪,该方法可对对记忆跟踪阶段的航迹预测及航迹关联进行更精细化的处理,其优点是避免了卡尔曼滤波方法仅采用最后一个时刻状态值进行预测时,由于滤波状态的不稳定导致的预测偏差大的问题。该方法可以最大程度地减小偏差,对于雷达失锁时目标航迹预测具有一定的实用价值。
