基于三维PH曲线的UAV在线路径规划及跟踪控制研究∗
2021-10-11周硙硙
周硙硙
(海军装备部驻南京地区第一军事代表室 南京 210001)
1 引言
随着无人飞行器(Unmanned Aerial Vehicle,UAV)技术的快速发展[1],UAV的航程、机动性能都得到了大幅提升,使得UAV更加智能化、自动化,使得UAV在目标识别[2]、目标跟踪[3]等方面有着越来越广泛的应用。而日益复杂化的应用环境却对UAV执行任务的能力提出了更高要求。因此,UAV执行任务体系的形成需要对参与执行任务的UAV进行实时在线路径规划,规划的路径需要满足相关性能约束条件,使得执行任务的UAV能够协同工作;同时UAV在执行任务过程中需要准确地跟踪规划的路径,使UAV实际飞行轨迹较小地偏离期望路径。
一些学者对UAV的在线三维路径规划算法进行了研究,文献[4]为保证无人机以最小被发现概率和较小的航程到达目标点,提出一种基于改进蚁群算法的无人机三维路径规划方法;文献[5]针对固定目标规划问题,提出一种动态稀疏A*算法和voronoi图改进算法融合的无人机三维路径规划方法;文献[6]通过栅格化方法对无人机飞行环境进行三维建模,并主要以最短路径为目标,提出了基于改进蚁群算法的无人机三维路径规划方法,但未考虑无人机的性能约束条件;文献[7]综合考虑无人机飞行高度、航迹长度等权重因子,提出了基于改进A*算法的三维无人机路径规划方法,并对规划的路径进行优化,以满足无人机的俯仰角、偏航角、转弯半径等性能约束条件。在路径规划的基础上,设计相关的路径跟踪控制律,从而实现对规划路径的跟踪。文献[8]提出一种基于切换平面的自适应非线性制导方法跟踪规划的三维Dubins路径;文献[9]通过模型参考自适应与动态逆相结合的方法设计路径跟踪控制器,实现对四旋翼无人机三维路径的跟踪控制。
目前,虽然关于UAV路径规划和路径跟踪控制律的设计相对成熟,但是大多数研究都是分开的,没有将路径规划和路径跟踪控制律统筹设计,也很少有利用规划路径特点进行UAV路径跟踪控制律的设计。为此,本文提出一种基于三维五次PH曲线[10~12]的UAV协同路径规划方法,该路径规划算法能够迅速为UAV规划出较优的路径;同时,针对UAV三维PH路径的特点,设计出相应的跟踪控制律,实现对UAV三维PH路径的跟踪控制。
2 基于三维五次PH曲线的UAV路径规划
在三维空间中,当UAV接受任务后,需要在初始位置点 ps(xs,ys,zs)和目标位置点 pf(xf,yf,zf)之间规划出一条满足UAV性能约束的路径r(t),在ps和 pf处的偏航角和俯仰角分别为(ϕs,ψs)、(ϕf,ψf),即初始点和目标点处的位姿信息分别为poses(xs,ys,zs,ϕs,ψs)、posef(xf,yf,zf,ϕf,ψf)。那么,UAV路径规划可表述为
2.1 三维五次PH曲线
2.2 基于三维五次PH曲线UAV路径规划

2.3 三维五次PH路径约束条件
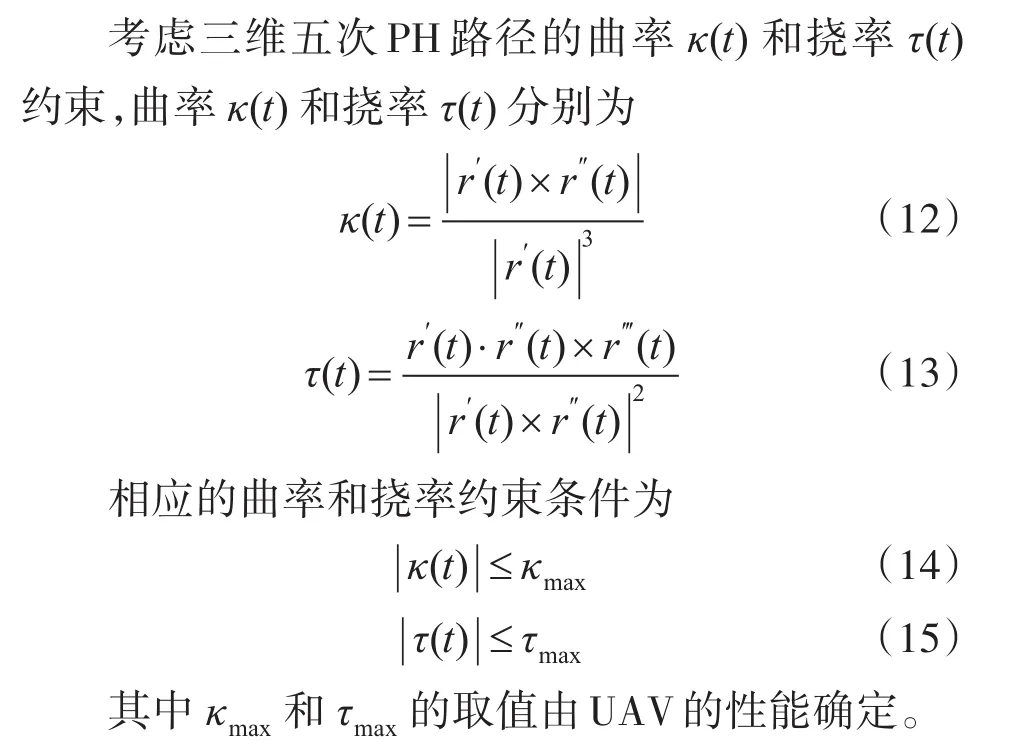
3 三维五次PH路径的跟踪控制
基于三维五次PH路径的特点,对UAV三维五次PH路径的跟踪控制采用降维转化的思想,即将UAV的三维PH路径跟踪控制降维转化为UAV二维路径跟踪控制和高度的跟踪控制。在式(3)~(5)和式(7)~(10)的基础上,UAV三维五次PH路径的三个坐标分量都可表示成参数的多项式形式。即

3.1 二维平面路径跟踪控制律设计
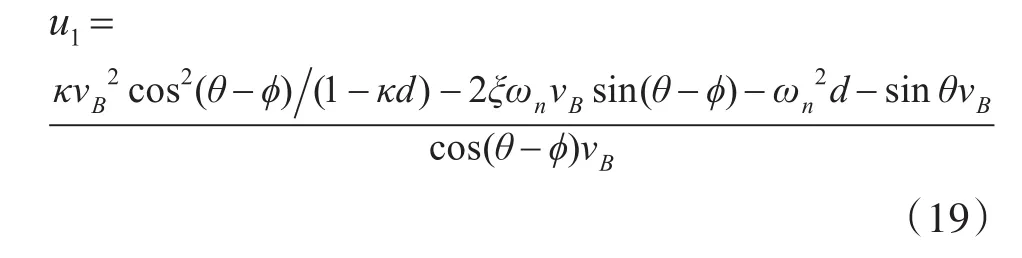
基于三维PH路径三个坐标分量可精确已知的特点,采用非线性动态逆控制器设计方法进行路径跟踪控制律设计,可有效降低控制律设计的复杂度。在文献[13]对UAV二维PH路径跟踪控制律设计的基础上,在跟踪UAV三维PH路径时,基于降维跟踪控制思想,相应的二维平面路径跟踪控制律设计为
3.2 高度跟踪控制律设计

4 UAV三维五次PH路径规划及跟踪控制仿真
4.1 UAV三维五次PH路径规划仿真
设定UAV的初始位置点Ps和目标位置点Pf分 别 为,Ps和Pf处的两个方向角分别为且最大曲率约束κmax=0.1,最大挠率约束τmax=0.1。相应的Matlab仿真结果如图1和图2所示,图1为UAV三维PH路径,图2为UAV三维PH路径的曲率和挠率曲线。
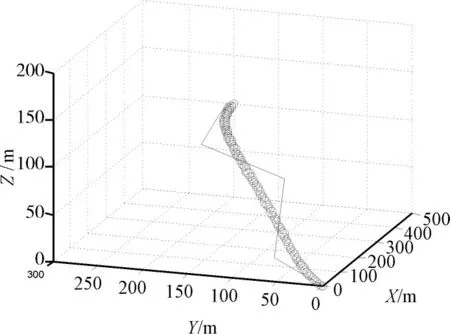
图1 UAV三维PH路径

图2 UAV三维PH路径的曲率和挠率曲线
从图2中可以得出UAV三维PH路径的曲率最大值κmax和挠率最大值τmax分别为0.015、0.075,均小于约束条件值0.1,能够满足UAV可飞行路径的曲率和挠率约束条件。因此,规划出的UAV三维五次PH路径满足要求。
4.2 UAV三维PH路径的跟踪控制仿真
对规划的UAV三维五次PH路径跟踪控制的初始化条件:UAV的速度vB=28m/s,阻尼比ξ=0.707,自然频率ωn=0.12rad/s,UAV路径初始曲率κ0=0,初始跟踪误差d0=0.6m,初始偏航角角θ0=-20°,UAV初始高度h0=0,初始俯仰角ψ0=15°。对UAV三维PH路径的跟踪控制的Matlab仿真结果如图3~6所示。
图3~5分别给出了UAV三维PH路径跟踪的xe误差曲线、ye误差曲线和ze误差曲线;图6为UAV三维五次PH路径跟踪图。从三条误差曲线上可以看出,三维PH路径的跟踪误差被控制在较小值上,可以得出相应的UAV三维PH路径跟踪控制律设计的有效性和可行性,表明基于三维PH曲线规划的UAV路径可跟踪。
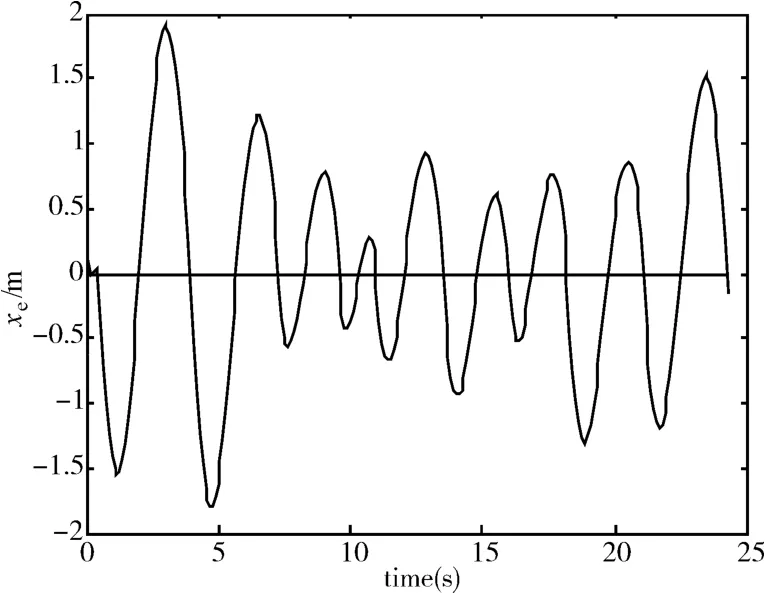
图3 xe误差曲线

图4 ye误差曲线
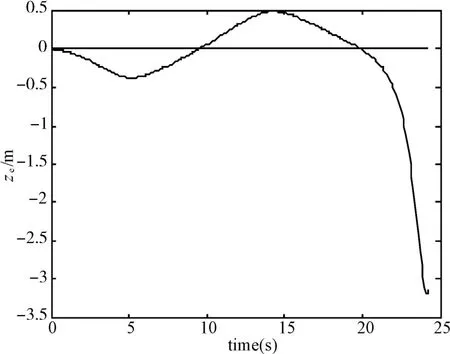
图5 ze误差曲线
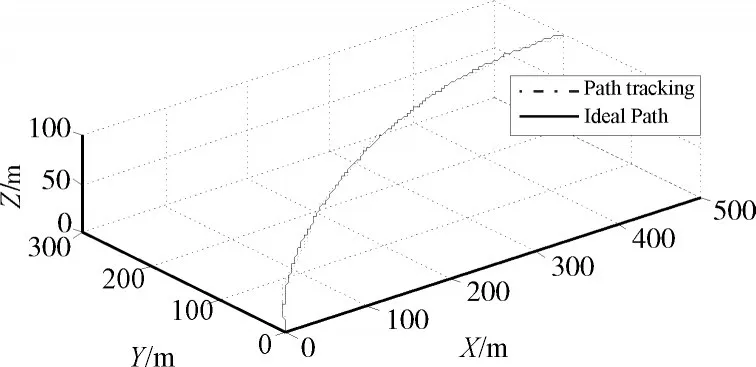
图6 三维五次PH路径跟踪图
5 结语
本文给出一种基于三维五次PH曲线理论的UAV三维路径规划方法,并在路径规划的过程中,考虑UAV的飞行性能约束,使规划出的PH路径安全可飞行;另外针对规划出的UAV三维PH路径参数化等特点,采用降维转化并基于非线性动态逆跟踪控制方法设计出UAV的三维PH路径跟踪控制律。通过Matlab仿真结果验证了提出的UAV三维路径规划和路径跟踪控制律设计方法的有效性和可行性。