新型张力腿平台双模块浮式海上风电机组结构系统的动力响应研究
2021-09-30王安安周道成任年鑫欧进萍
王安安,周道成,任年鑫,欧进萍
(1.大连理工大学海岸和近海工程国家重点实验室,大连 116024;2.海南大学土木建筑工程学院,海口 570228;3.海南大学南海海洋资源利用国家重点试验室,海口 570228)
0 引言
当前,风电机组大型化是降低风力发电单位发电成本的有效方法之一,因此,DTU 10 MW级风电机组受到了广泛关注[1-2]。针对大型海上风电场而言,其平台的稳固安全是影响大型海上风电机组安全运行的重要因素。海洋环境荷载是影响海洋平台安全性的主要因素,而采用张力腿平台的系泊系统可以有效控制平台的纵摇和垂荡运动,特别适用于保障大型海上风电机组的良好运行状态[3-4],且从建造成本来看,性价比较高[5]。
国内外学者针对张力腿平台(TLP)式海上风电机组开展了广泛而深入的研究。NEMATBAKHSH等[6]分别利用计算流体力学(CFD)和势流理论方法,指出了张力腿的张力主要受纵摇响应激励影响,且纵摇运动含有更多非线性成分。JESSEN等[7]建立了浮式海上风电机组结构系统的气动-液压-伺服弹性模型,指出了在单独风荷载情况下,浮式海上风电机组结构系统的理论气动性能优于实验气动性能。任年鑫等[8-10]针对张力腿平台式浮式海上风电机组,利用CFD方法进行了风浪耦合时域分析,模拟数值结果与模型试验结果具有较好的一致性;研究还指出,波浪力在纵荡响应中起主导作用,而风力对支撑风电机组的浮体结构的平均纵荡有重要贡献。
浮体主要是作为海上风电机组的支撑结构,目前,有关双浮体和多浮体的研究主要是针对模块化大型多体浮式结构系统。MICHAILIDES等[11-12]通过数值和模型试验验证了一种半潜式海上风电机组和摇摆式波浪能装置(WEC)集成结构(SFC)系统的发电性能和良好的水动力特性。任年鑫等[13-14]分别针对Spar式风能波浪能集成结构(STC)系统和单桩基础式风能波浪能集成结构(MWWC)系统这2种风能波浪能集成结构系统进行了耦合时域分析,揭示了STC系统长期发电功率和疲劳损伤的性能特征,并指出在不考虑尺度试验模型粘滞阻尼效应的情况下,数值模型的动力响应结果略高于试验模型的动力响应结果。
浮式海上风电机组(FOWT)现有的安装方法主要是整体安装方法主要和分体安装方法,这2种安装方法采用的连接方式均是法兰对准式安装。由于分体安装方法对浮式海上风电机组与其平台之间的对准精度要求极高,因此迫切需要一种新型的具有高鲁棒性且对安装设备的精度要求低的浮式海上风电机组模块化设计及安装方法。但目前基于安装、替换和拆除方便的浮式海上风电机组模块化设计的研究还非常有限。
因此,本文基于安装与拆除方便的结构设计理念,针对浮式海上风电机组提出了一种新型张力腿平台双模块浮式海上风电机组结构系统。主要基于AQWA软件及其user-force二次开发模块,建立了该新型张力腿平台双模块浮式海上风电机组结构系统的空气动力与水动力耦合时域数值模型,并重点研究了该新型张力腿平台双模块浮式海上风电机组结构系统在海上风电机组典型工作海况下的动力响应特征,揭示了此种双模块结构系统改善浮式海上风电机组运行性能的可行性。
1 理论基础及数值模型
1.1 新型张力腿平台双模块浮式海上风电机组结构系统的概述
本文提出了一种新型张力腿平台双模块浮式海上风电机组结构系统,其结构示意图如图1所示。

图1 新型张力腿平台双模块浮式海上风电机组结构系统的结构示意图Fig.1 Schematic diagram of installation of new type of TLP dual-modules FOWT structure system
该新型张力腿平台双模块浮式海上风电机组结构系统主要包括:1)DTU 10 MW风电机组浮体模块;2)张力腿平台模块;3)张力腿平台模块与风电机组浮体模块夹紧装置(下文简称“夹紧装置”)。
DTU 10 MW风电机组浮体模块具有重力与浮力自平衡的特征。张力腿平台模块是通过自身的结构重力加上张力腿的预张力与浮力达到自平衡,其中,张力腿平台的中心柱设置1个内径略大于风电机组塔筒外径的贯通的空柱体(空柱体内径与塔筒外径的径向间距为0.5 m)。张力腿平台模块与DTU 10 MW风电机组浮体模块通过垂向双层对称夹紧装置锁定连接。
新型张力腿平台双模块浮式海上风电机组结构系统的主要设计参数如表1所示。

表1 新型张力腿平台双模块浮式海上风电机组结构系统的主要设计参数Table 1 Main design parameters of new type of TLP dual-modules FOWT structure system
1.2 平台系统的双体动力耦合模型
考虑到DTU 10 MW风电机组浮体模块与张力腿平台模块的多体机械耦合和水动力耦合效应,新型张力腿平台双模块浮式海上风电机组结构系统的动力方程可表示为:

式中:M为质量矩阵;x为位移矩阵;为速度矢量矩阵;为加速度矢量矩阵;δ为阻尼矩阵;k为刚度矩阵;F e为耦合波浪荷载矩阵;F t为张力腿平台的张力腿结构受力矩阵;F d为风荷载矩阵;F c为风电机组塔筒与张力腿平台机械耦合荷载矩阵。除M外,其余参量均为时间t的函数;各参量矩阵中的下标1和2分别表示张力腿平台模块和DTU 10 MW风电机组浮体模块。
1.3 空气动力荷载分析
风电机组叶片的空气动力荷载(即水平推力)的计算基于叶素动量理论(BEM)方法,参考DTU 10 MW海上风电机组的主要设计参数[6],在不同入射风速下该风电机组的水平推力及其输出功率函数关系如图2所示。

图2 在不同入射风速下DTU 10 MW海上风电机组的水平推力及输出功率之间的函数关系[6]Fig.2 Functional relationship between horizontal thrust and output power of DTU 10 MW offshore wind turbine at different incident wind speeds
1.4 水动力荷载分析
AQWA软件能有效模拟采用张力腿平台的系泊系统、二阶波浪力荷载、张力腿平台模块和DTU 10 MW风电机组浮体模块间的水动力耦合效应及夹紧装置的机械耦合效应[15]。基于势流理论,利用AQWA软件构建了该新型张力腿平台双模块浮式海上风电机组结构系统的水动力数值分析模型,具体如图3所示。

图3 新型张力腿平台双模块浮式海上风电机组结构系统的水动力数值分析模型Fig.3 Hydrodynamic numerical analysis model of new type of TLP dual-modules FOWT structure system
2 主要模拟结果分析
分别建立新型张力腿平台双模块浮式海上风电机组结构系统(下文简称“双模块结构系统”)和与之对应的常规张力腿平台单体浮式海上风电机组结构系统(下文简称“单体结构系统”)的数值分析模型。选取了海上风电机组4种典型的工作海况,即典型规则波浪海况、典型定常风浪联合运行海况、极端随机风浪联合作用海况,以及典型拆除海况,对比分析2种结构系统在海上风电机组典型工作海况下的动力响应特征,揭示双模块结构系统改善风电机组的运行性能的可行性。
2.1 典型规则波浪海况下不同结构系统的动力响应特征
选取一系列典型规则波浪(波高为2 m,波浪周期为4~12 s)海况,对双模块结构系统与单体结构系统的动力响应特征进行对比研究,得到的主要参数曲线如图4所示。
从图4a可以看出,在典型规则波浪海况下,随着波浪周期的增大,2种结构系统的纵荡位移均随之增大,但双模块结构系统的纵荡位移显著小于单体结构系统的纵荡位移,且随着波浪周期的增大,二者相差的百分比也随之增大。


图4 典型规则波浪海况下2种结构系统的动力响应特征的主要参数对比Fig.4 Comparison of main parameters of dynamic response characteristics of two structural systems under typical regular wave sea conditions
从图4b可以看出,双模块结构系统的纵荡附加质量显著大于单体结构系统的纵荡附加质量,这也是双模块结构系统的纵荡位移小于单体结构系统的纵荡位移的主要原因。
从图4c可以看出,随着波浪周期的增大,2种结构系统的主要受力张力腿的受力均随之增大,并在波浪周期为9 s时达到极值,且双模块结构系统的主要受力张力腿的受力略大于单体结构系统的主要受力张力腿的受力,但差值均在5%以内。
由于张力腿平台模块与DTU 10 MW风电机组浮体模块之间的夹紧装置是呈垂向双层对称分布的,从图4d可以看出,双模块结构系统中夹紧装置的水平方向夹紧受力fX最大不超过1 MN,绕Y轴夹紧弯矩MY最大不超过22 MN•m。这些结果对于夹紧装置的优化设计具有重要的参考价值。
2.2 典型定常风浪联合运行海况下不同结构系统的动力响应特征
选取典型的定常额定风速参考海况(下文简称“典型定常风浪联合运行海况”),该海况下风速v=11.4 m/s,波高H=3 m,波浪周期T=6 s。对双模块结构系统与单体结构系统的动力响应特征进行对比研究,纵荡位移和主要张力腿的受力对比模拟结果如图5所示。
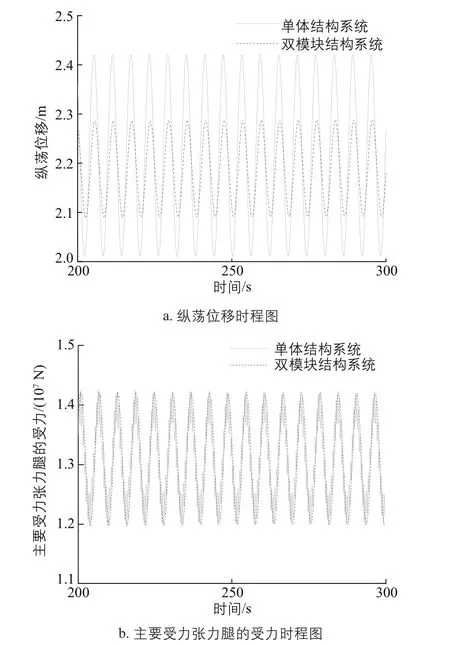
图5 典型定常风浪联合运行海况下2种结构系统的动力响应特征的主要参数对比Fig.5 Comparison of main parameters of dynamic response characteristics of two structural systems under typical steady wind wave combined operation sea conditions
从图5a可以看出,在典型定常风浪联合运行海况下,双模块结构系统的纵荡位移显著小于单体结构系统的纵荡位移。从图5b可以看出,在该工作海况下,双模块结构系统的主要受力张力腿的受力值与单体结构系统的主要受力张力腿的受力值非常接近,二者最大值的差值不足2%。
值得注意的是,在典型定常风浪联合运行海况下,这2种结构系统的主要动力响应特征的对比结果与其在典型规则波浪海况下得到的对比结果(见图4)非常相似。即双模块结构系统的纵荡位移比单体结构系统的纵荡位移小,而前者的主要受力张力腿的受力则略大于后者的。
2.3 极端随机风浪联合作用海况下不同结构系统的动力响应特征
根据DTU 10 MW风电机组的主要设计参数[6],进一步考虑极端随机风速与不规则波浪联合作用的海况下双模块结构系统的动力响应特征情况。采用JONSWAP波浪谱描述不规则波浪特征(λ=3.3),可更接近实际的海洋环境条件;选取的极端随机风浪联合作用海况下的其他参数为:平均风速Va=40 m/s,有义波高Hs=6 m,谱峰周期Tp=10 s。极端随机风浪联合作用海况下双模块结构系统与单体结构系统的纵荡位移和主要受力张力腿的受力情况进行对比分析,具体如表2所示。
从表2可以看出,在极端随机风浪联合作用海况下,双模块结构系统的纵荡位移比单体结构系统的纵荡位移小40.23%。但值得注意的是,双模块结构系统的主要受力张力腿的受力极值大于单体结构系统主要受力张力腿的受力极值,约大15.2%。此外,根据表中的数据结果可以得到耦合夹紧装置的fX和MY的极值分别是6.47 MN和346 MN•m。主要受力张力腿和夹紧装置的受力极值等相关信息对双模块结构系统的结构安全设计具有重要的参考价值。

表2 极端随机风浪联合作用海况下2种结构系统的动力响应特征的主要参数对比Table 2 Comparison of main parameters of dynamic response characteristics of two structural systems under extreme random wind wave combined action sea conditions
2.4 典型拆除海况下不同结构系统的动力响应特征
为验证采用该双模块结构系统时海上风电机组进行拆除的可行性,选择不规则波浪海况(有义波高Hs=2 m,谱峰周期Tp=5 s)进行风电机组拆除模拟。安装时,选用风电机组整体安装方法,这样可以减小采用浮式基础时在水上安装叶片的难度,同样的,拆除时也采取风电机组整体拆除的方式。利用缆绳,以0.05 m/s的拉出速度实现风电机组整体向上抽出的操作,在张力腿平台中心柱的内壁设置防碰撞隔垫(fender),以缓冲风电机组塔筒与张力腿平台中心柱在拔除过程中产生的碰撞。由于风电机组塔筒外径与张力腿平台中心柱内径的间隙为0.5 m,因此选取的fender的尺寸为0.5 m,刚度为5×108N/m,关于fender具体的优化参数后续将进一步研究。对典型拆除海况下风电机组与双模块结构系统的动力响应特征进行对比研究,具体如图6所示。
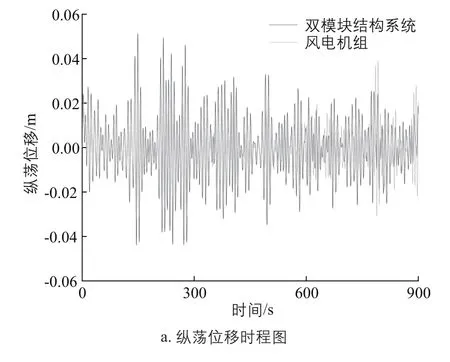

图6 典型拆除海况下风电机组与双模块结构系统的动力响应特征的主要参数对比Fig.6 Comparison of main parameters of dynamic response characteristics between wind turbine and dual-modules structure system under typical demolition sea conditions
从图6中可以发现,在典型拆除海况下,双模块结构系统与风电机组的纵荡位移、fender受力和缆绳受力这几项动力响应特征主要参数的极值均处于可接受范围,满足风电机组设计参考标准;而且双模块结构系统与风电机组的运动趋势一致,所以二者的相对纵荡位移明显小于风电机组塔筒与张力腿平台中心柱的间隙,fender水平方向的受力在5×106N以内,并且拉出风电机组时缆绳的受力与风电机组拉出过程中的重力变化趋势一致。以上均说明采用双模块结构系统时风电机组的拆除具有可行性。
3 结论
本文提出了一种应用于浮式海上风电机组的新型张力腿平台双模块浮式海上风电机组结构系统,考虑了张力腿平台模块与DTU 10 MW风电机组浮体模块的多体动力耦合效应,并重点对比研究了海上风电机组4种典型工作海况下该双模块结构系统和与之对应的单体结构系统的主要动力响应特征,得到的主要结论如下:
1)在典型规则波浪海况下,双模块结构系统的纵荡位移随波浪周期的增加而增大,且其纵荡位移显著小于单体结构系统的,这主要是由于前者的纵荡附加质量显著大于后者的原因。
2)在典型定常风浪联合运行海况下(额定风速),双模块结构系统的纵荡位移也显著小于单体结构系统的纵荡位移,且2种结构系统的主要受力张力腿的受力值非常接近,这说明双模块结构系统可以更好地保障海上风电机组的良好运行性能。
3)在极端随机风浪联合作用海况下,双模块结构系统的纵荡位移极值比单体结构系统的纵荡位移极值约小40.23%,但双模块结构系统的主要受力张力腿的受力极值比单体结构系统的约大15.2%。因此,为确保双模块结构系统在极端随机风浪联合作用海况下的安全性,需充分考虑其张力腿结构的优化设计。
4)风电机组的拆除通过放松张力腿平台模块与风电机组浮体模块夹紧装置及利用缆绳向上拔出风电机组来实现。通过模拟典型拆除海况下采用双模块结构系统的海上风电机组拆除过程的动力响应特征,证明了采用该双模块结构系统的海上风电机组拆除的可行性和便利性。此外,更为详细的拆除过程优化模拟将在后续研究中开展。
