基于谱峰斜率进行变步长搜索的DOA估计方法
2021-09-28樊文倩
樊文倩,李 舰
(西北大学 信息科技与技术学院,陕西 西安 710127)
波达方向(Direction of Arrival,DOA)估计[1-2]是对传感器阵列接收的数据进行分析处理,估计目标的方位或俯仰信息,是雷达、声纳、无线通信等领域的关键技术[3-4]。作为高分辨DOA估计的经典方法,Capon算法[5-6]通过固定步长的谱峰进行穷尽搜索,获得目标的角度信息[5-7]。该方法存在计算量和存储量庞大、运行时间长、实时性差的问题[8-9]。通常情况下,固定步长[10-11]难以协调计算量和收敛速度之间的内在矛盾。大步长可以简化计算复杂度,但难以获得高的估计精度,小步长增加了计算负担,却有利于提高分辨性能。变步长算法通常包含大步长的粗搜索和小步长的精搜索过程,可较好地平衡收敛速度和估计精度。
文献[12]深入研究了变步长理论,在低信噪比的微弱信号和大误差复杂场景下,提出一种改进的变步长最小均方算法,提出了步长因子和误差之间的函数关系,使步长因子对时变系统具备跟踪能力,该自适应算法对干扰滤除效果十分显著。文献[13]提出一种分级迭代变步长算法,很好地解决了收敛速度与稳态误差之间的矛盾,该算法对盲源分离具有更稳更快的分离速度和稳态性能。
本文提出了一种低复杂度、变步长的搜索算法,首次搜索使用大步长的Capon算法进行搜索,根据谱峰首次搜索结果确定DOA检测范围,并求出该范围内的斜率值,根据斜率值首次小于零确定谱峰在其左侧,记斜率小于零点为P,所以取该斜率对应范围的左值,同时向左取P-2点,并从P-2点处开始向右进行变步长搜索,根据上一步的步长x=1,选取步长函数进行变步长的迭代逼近搜索,并计算每个步长对应的谱峰函数的斜率值Ki,直到斜率值首次小于零,并取斜率值小于零的区间的左值,作为本次期望信号的估计角度DOA。
1 数据模型及Capon算法
空间中L个窄带信号,同时入射到M个半波长的均匀线性阵列,阵元间d=λ/2,P个远场窄带信号以λ为波长入射到阵列,设各通道独立且附加加性高斯白噪声(AWGN),定义DOA为信号来向与阵列法线的夹角θ,以第一个阵元为参考点,在第t次快拍下阵元m(m=1,2,…,M)接收的P个信源的总响应表示为
(1)
式中,Sp为第P个信源的复包络;nm为第m个阵元上的噪声,则阵列一次快拍的接收数据也可表示为
x(t)=A(θ)S(t)+n(t)
(2)
式中,x(t)为M×I维的接收数据向量;S(t)为L×I维的信号向量;n(t)为M×I维的加性高斯白噪声向量;A(θ)为M×L维导向矢量矩阵,导向矢量a(θl)定义为
a(θl)=[ejx1wl,ejx2wl,ejx3wl,…,ejxMwl]T
(3)
式中,ωl=2πsinθl/λ为第l个阵元接收信号的角频率;λ为信号的中心波长;xi(i=1,2,…,M)为第i个阵元的坐标,阵列输出的协方差矩阵表示为
(4)

(5)
式中,a(φ)为期望信号的方向;R-1为R矩阵的逆矩阵。
2 本文提出的算法
假设空间有L个窄带信号,同时入射到M个半波长的均匀线性阵列,阵元间d=λ/2,P个远场窄带信号以θ=[θ1,θ2,…,θp]入射到阵列,入射波长为λ,设各通道独立且附加的噪声是加性高斯白噪声,定义DOA为信号来向与阵列法线的夹角θ。经典Capon超分辨DOA估计方法采用固定步长进行谱峰穷尽搜索,存在计算量和存储量庞大、运行时间长、精准度不高的问题。

所提算法的具体实现步骤如下。
① 利用经典的Capon算法,先使用大步长的均匀搜索方法,根据Capon算法的谱峰公式[9]
粗略地估计出谱峰值的范围,并截取该范围,利用斜率公式
求出截取范围内的谱峰斜率值Ki。式中,jdpf(i+1)为第i+1个点的角度谱峰值;jdpf(i)为第i个点的角度谱峰值。
② 根据上一步求得斜率值,找出截取范围内斜率首次小于零对应区间的左值P,由于谱峰值在P点左侧,所以向左取值P-2,并从P-2处开始向右进行变步长搜索。

3 仿真分析
3.1 仿真条件
本文的所有仿真实验均是在装有Inter®CoreTM2 Duo CPU E8400@3.00 GHz和6.00 GB的RAM,MatlabR2018ade PC机上实现的,本文提出的算法属于初期的理论阶段,因此所有的数据均采用理想的、假设的数据来进行验证。
在Matlab中进行大量的仿真实验,分别从RMSE、算法复杂度和分辨成功率这3个方面对所提算法进行性能评价。假设阵列天线为18阵元的均匀线性阵列,阵元间距为半波长,期望信号的来波方向是36.7°。均匀线阵所加载的误差均值为零,方差为正态分布的随机值,并且每个阵元的误差单独加载,针对每种变量进行试验,每次采用100次Monte Carlo独立实验的平均结果,将其均方根误差作为评估阵列数据处理误差对算法性能影响的依据。
3.2 改进算法的仿真实验
在仿真实验中,假设有18个均匀线性排列的阵元,阵元间距为λ/2,信号之间相互独立,信噪比为-6,期望信号的来波方向为36.7°。
第1步:用bc表示步长,取bc=5,采用经典的Capon算法在[1°,90°]间进行谱峰粗搜索,仿真结果如图1所示,得到粗略的谱峰范围为[30°,40°],截取谱峰范围[30°,40°],并求出该范围内每个点对应的斜率值,仿真结果如图2所示。
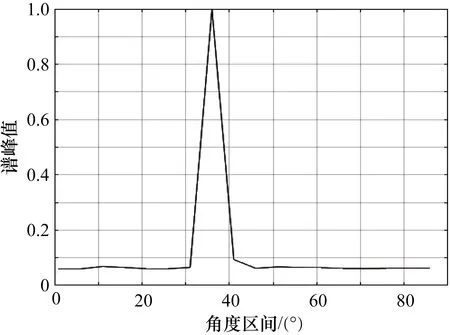
图1 步长为5 的谱峰粗搜索

图2 31°~41°间谱峰斜率值
第2步:根据斜率值首次小于零的左侧为谱峰的特点,找到斜率值首次小于零的区间的左值37,同时再向左取值35,并从点35处开始向右进行变步长的谱峰搜索。

图3 算法流程图
3.3 RMSE的仿真结果

(6)
图4~图6是两种算法在改变信噪比、阵元数和快拍数的情况下的RMSE性能的实验仿真图。由仿真图4~图6可得,在信噪比、阵元数和快拍数改变的情况下,所提算法的RMSE更小,更接近期望信号角度。

图4 不同信噪比对RMSE的影响

图5 不同阵元数对RMSE的影响

图6 不同快拍数对RMSE的影响
3.4 算法的复杂度
通过算法复杂度分析本文所提算法性能,首先提出两个关于衡量算法复杂度的性能指标:① 时间复杂度,指执行算法所需要的运行时间[15];② 运算复杂度,指程序里所包含的加减乘除、转置及求正弦等次数的和。本次实验通过比较所提算法和Capon算法的运行时间和RMSE来衡量两种算法的复杂度。实验结果如表1和表2所示。
从表1、表2中得知,在一定条件下,所提算法在运行时间上并没有节省,而精度平均值是取10次RMSE的平均值来衡量的,因此在精度的准确性上精确了近9倍,计算过程如下:

表1 两种算法运行10次的RMSE 单位:(°)
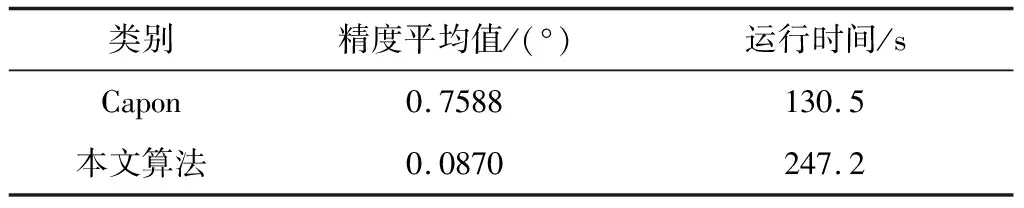
表2 两种算法RMSE的平均值和运行时间


本文所提算法的最大贡献就是准确度的提高,通过比较两个算法的RMSE来进行衡量,传统的Capon算法的平均RMSE为0.7588°,而本文提出通过引入步长函数,进行变步长的谱峰值搜索的方法求得的RMSE为0.0870°,所以相对原有的算法,本文所提算法在精度的准确性上精准了近9倍。而精度是通过比较两个算法多次运行的RMSE来进行比较的。传统的Capon算法的一次运行时间为130.5 s,而本文提出的方法进行谱峰搜索时一次运行时间为247.2 s,所以相对原有的算法本文所提算法在运行时间上并没有节省,这也是所提算法的一个不足之处。
3.5 分辨成功率的仿真结果
分辨成功率(Probability of Resolution,PR)即在一定条件下,取一个误差阈值,统计小于这个阈值的次数与总共实验的次数的比例。设所允许的角度估计误差门限值为▽θ,由于本次的实验的期望角度为36.7°,精确到了小数点后一位,所以取▽θ=0.5,仿真结果如图7所示,在Q次独立实验中N个DOA角度的估计值均满足式(7)的实验次数为Q1次,则PR=(Q1/Q),仿真结果如图7所示。

图7 误差门限为0.5时的PR
(7)
当估计的角度为两个且两角度相距很近,分别为θ1和θ2且谱峰函数f(·)取值满足式(8),即认为θ1
和θ2分辨成功。同理存在多个信号时,且角度间相距很近时,记为θi(i=1,2,…,n)。
(8)
(9)
通过仿真图7可得,估计一个角度时,所提算法的PR明显优于传统的Capon算法,当存在多个信号时,可以采用上述式(9)的方法。
4 结束语
本文所提算法采取简单的方法快速估计出期望信号的角度,在准确度上相比传统的Capon算法精准了近9倍,改善了定位的准确性,避免了穷尽的谱峰搜索。仿真实验表明:在相同信噪比下,所提算法的分辨成功率更高;同时所提算法的RMSE在信噪比、快拍数和阵元数变化的情况下,均明显优于经典的Capon算法,估计精度优于传统的Capon算法,更接近于期望信号。
虽然本文所提算法检测单次算法运行时间上高于传统的Capon算法,但是降低了算法的估计误差,减少了无效的谱峰搜索。因此本文所提算法通过引入步长函数,进行变步长迭代逼近搜索求斜率值的方法,求解出期望信号的DOA,避免了穷尽的谱峰搜索,更高效准确地估计出期望信号的DOA。
