基于射频技术的高速运动图像自动识别模型*
2021-09-28赵莉苹邱秀荣
赵莉苹,邱秀荣
(1.郑州科技学院 信息工程学院,郑州 450064;2.商丘工学院 信息与电子工程学院,河南 商丘 476000)
高速运动图像的目标自动识别技术是计算机视觉图像处理领域极具挑战性的研究课题之一[1],在航空航天、军事公安等领域具有良好的应用前景.但目前高速运动图像的自动识别技术仍存在较多问题未得到有效解决,现阶段目标图像数据显著上升,如何解决目标自动识别的精度问题已经成为高速运动图像目标自动识别技术研究的关键.
目前众多学者对高速运动图像自动识别模型[2-3]进行了研究,并取得了一定的研究成果.吴志攀等[4]提出了基于深度学习的高速运动图像自动识别模型,该模型采用维纳滤波对采集到的高速运动图像进行复原处理,运用深度学习算法,将复原后的高速运动图像进行识别,该模型具有一定的识别速度,但是识别效果不太理想.李江等[5]提出了基于主成分分析的高速运动图像自动识别模型,该模型通过智能摄像机采集高速运动图像,采用主成分分析法提取高速运动图像特征,根据处理后的特征构建多个分类器,采用Adaboost方法将较弱的分类器构建成相对较强的分类器,利用该分类器完成对高速运动图像的自动识别,该模型具有较高的识别效率,但是识别误差较高.
针对上述问题,本文提出了基于射频技术的高速运动图像自动识别模型.结合射频读取采集得到的高速运动图像编码,对高速运动图像进行分析.分析结果表明,所提基于射频技术的高速运动图像自动识别模型在识别过程中误差较低且用时短,具备一定的应用价值.
1 图像自动识别模型构建
1.1 平台设计
高速运动图像采集处理平台能够对高速运动图像进行采集,并对其进行处理,该平台所选用的摄像头是PIPER智能摄像头.本文设计的高速运动图像处理结构图如图1所示.
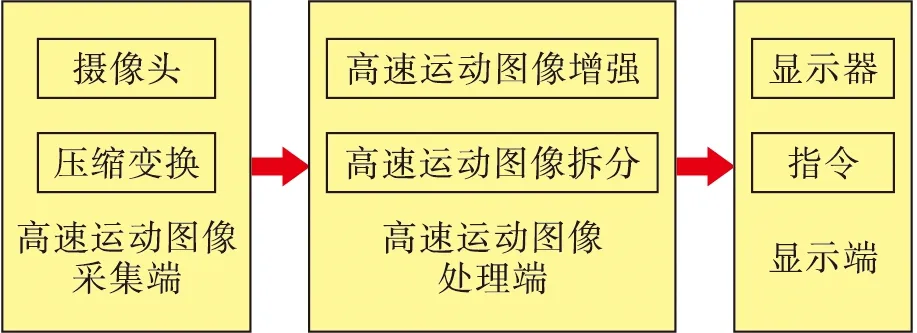
图1 高速运动图像处理结构图Fig.1 Structure diagram of high-speed moving image processing
通过图1可以看出,高速运动图像处理平台是由采集端、处理端和显示端三个结构组成.由图像采集端摄像头将采集到的二维高速运动图像压缩变换为三维视觉,并将高速运动图像进行A/D转换后发送给图像处理端;对高速运动图像进行增强和拆分处理后,再将处理后的图像发送给显示端,通过某些指令和终端显示器显示出来,完成高速运动图像的处理.其中将二维高速运动图像向三维高速运动图像进行转换的过程称为逆向映射,该映射方法可以对高速运动图像进行图像增强,将增强后的高速运动图像传输到高速运动图像识别平台中[6].
高速运动图像自动识别平台是根据射频技术所构建的,该平台能够对高速运动图像进行自动识别.射频技术主要采用射频通信来实现高速运动图像自动识别,具有很强的抗干扰能力,在任何天气条件下都具有较好的识别精度且操作也较为简单.射频技术硬件结构如图2所示.
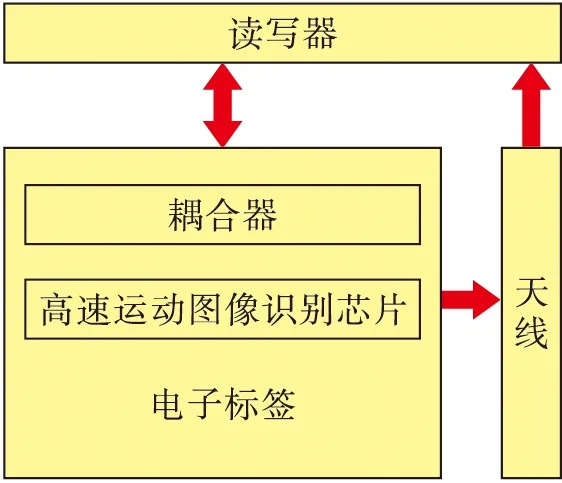
图2 射频技术硬件结构图Fig.2 Hardware structure diagram of RF technology
由图2可知,射频技术硬件是由电子标签、rg-rap220-e-v2.0天线、ZK-RFID102R读写器、FM1108识别芯片及Pasternack射频耦合器构成的.其中电子标签与读写器之间通过耦合器实现射频信号的空间耦合,由此来完成能量的传递和数据交换.电子标签将编码信息通过天线发射出去,天线接收电子标签发送来的调制信号,再经天线的调制器传送到读写器处理模块,经解调和解码后将有效信息传送到后台主机系统进行相关处理[7].高速运动图像自动识别对天线传输效率和稳定性要求极为严格,为此必须要选择性能较好的323 m射频天线.读写器主要功能是获取通过电子标签得到的高速运动图像编码,并对其进行及时的语音播报[8-10],其中读写器分为两种:便捷式与安装式,本文选择了安装式读写器进行设计.
1.2 模型设计
在上述射频技术分析的基础上,对高速运动图像进行分析,建立目标动图像尺度空间模型.本文利用高速运动图像特征向量来描述其特征点,并对其进行匹配,在目标图像特征点匹配时加入几何区域限定来完成识别.目标图像的尺度空间模型表达式为
(1)
式中:Lxx为不同分析度下的目标图像;G(t)为高斯核;I(X)为高速运动图像;X=(x,y)为像素点(x,y)的卷积.利用核函数与卷积函数计算高速运动图像的高斯核,并将其作为目标图像.
求取高速运动图像中像素矩阵H的行列式决策值,利用该值来确定兴趣点.为了简化应用,可以引入卷积计算、滤波器Fxy及权值w等对准确值和相似值两者间存在的误差进行平衡,计算表达式为
det(H)=LxxFxy-(wFxy)2
(2)
采用高斯核的卷积原理可以实现在不同分析角度下高速运动图像的描述,一般来说,高斯标准差能够体现出高速运动图像的尺度大小[11].假设,滤波器选取3×3正方形的像素区域,将其计作9个高速运动图像像素点,在其中随机选取像素点.在尺度层从上到下将其与所有高速运动图像像素点进行比较,当高速运动图像中的像素点比附近其他像素大时,选取像素点为正值,这时就可以将这个点当成这个区域的特征点[12].
将高速运动图像特征点当作中心,将其主要方向设定成x轴方向,选取4×4正方形区域,并对所有区域内小波影响值进行运算,得到高速运动图像的一个四维向量,最后利用高速运动图像64维特征向量来代表高速运动图像的特征点.在目标图像采集时会出现很多不确定因素,在时间发生变化时高速运动图像的特征点也会发生一定的变化,为此本文将对两帧高速运动图像匹配识别时特征点的跟踪匹配进行分析.

为了提高该识别模型的精度,文中在高速运动图像特征点匹配时加入几何区域限定,以运动图像点(xi,yi)、(xj,yj)为中心画一个矩形区域当作高速运动图像识别几何限定区域,使用模型进行高速运动图像识别时不能超出该区域.
2 系统性能测试与结果分析
为了验证所提出的基于射频技术的高速运动图像自动识别模型的综合有效性,需要对其模型进行测试.本次测试的操作系统为Windows7,内存容量为24 GB,采用i-SPEED 210/211超高速视频摄像机在某限速为129 km/h的路段采集600组高速行驶车辆图像,图像采集速度为300 000帧/s,分辨率为4 096×2 440,400万像素.将基于神经网络的高速运动图像自动识别模型、基于主成分分析的高速运动图像自动识别模型与所提模型的识别效果进行对比,结果如图3所示.
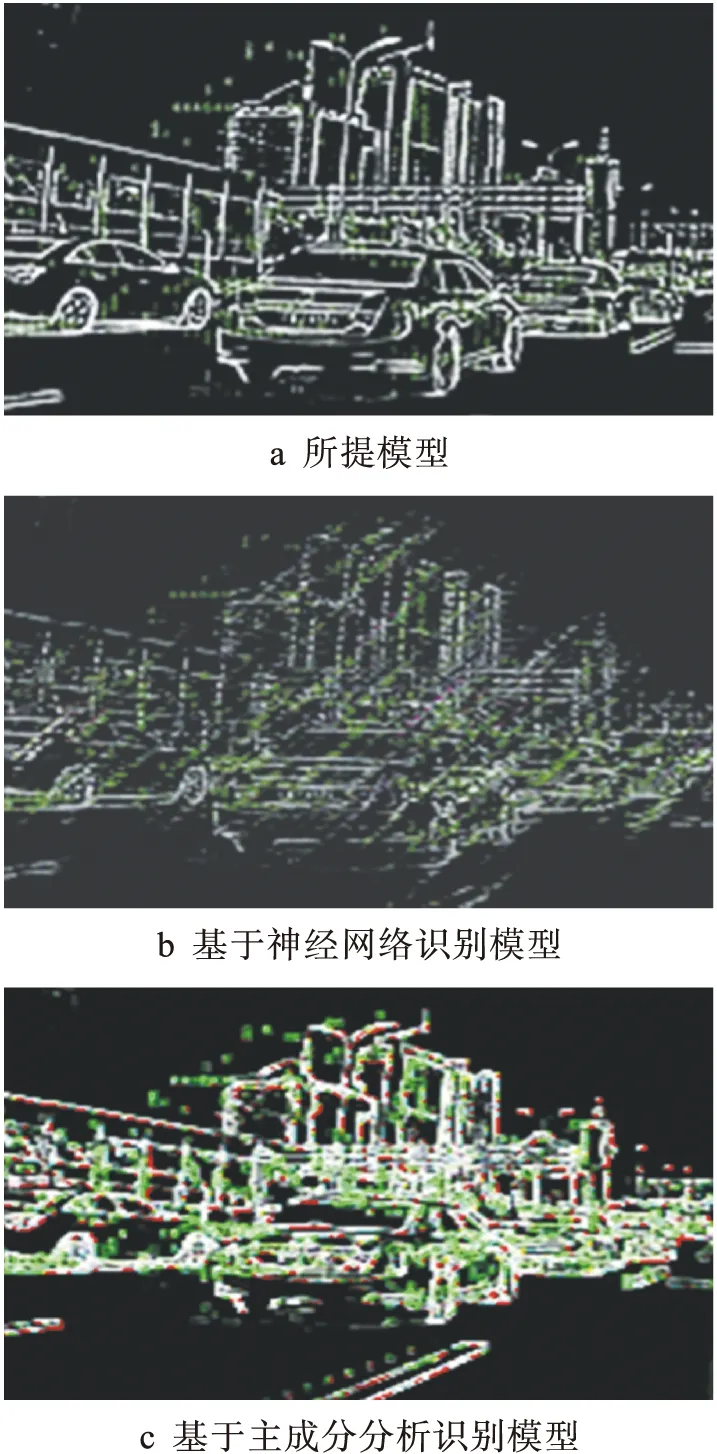
图3 不同模型高速运动图像识别效果对比Fig.3 Comparison of recognition effects for high-speed moving images by different models
通过图3可以看出,所提模型对高速运动图像识别效果最好,图像较为清晰;而其他两种算法对高速运动图像识别效果比较模糊,识别效果不太理想.选取50块车牌(高速运动图像)作为测试数据,将所提模型(模型1)与基于神经网络的高速运动图像自动识别模型(模型2)和基于主成分分析的高速运动图像自动识别模型(模型3)进行车牌误检测数量对比实验,实验结果表明,三个模型的误检测数量分别为3、8、10.所提模型识别的车牌误检测数量明显低于其他两种模型,具有较高的识别精度.实验采集图像600组,信息采样的初始像素为1 200×1 200,使用三种模型分别对600组图像进行识别,用时对比测试结果如表1所示.
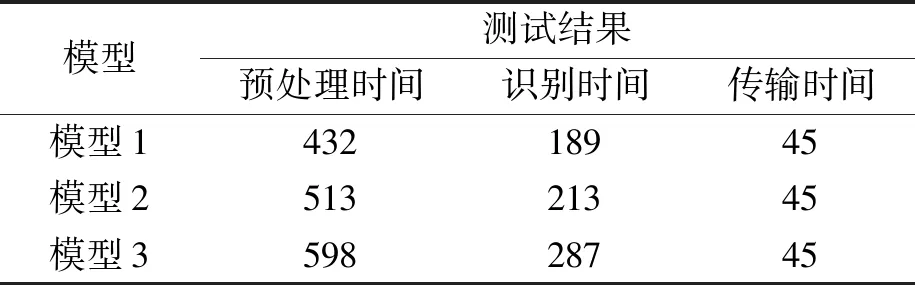
表1 不同模型识别用时对比测试Tab.1 Comparison test for recognization time of different models ms
通过表1可以看出,所提识别模型对高速运动图像的预处理时间和识别时间都明显低于其他两种模型,并且三个模型的传输时间相同.整体而言,所提模型的识别效率最高,验证了文中所提识别模型的高效性.
3 结 论
为解决当前高速运动图像自动识别方法普遍存在的识别误差较高、用时长、效率低等问题,本文提出基于射频技术的高速运动图像自动识别模型.在智能摄像头对高速运动图像采集后,结合射频读取采集得到的高速运动图像编码,对高速运动图像进行分析,再建立目标动图像尺度空间模型,利用高速运动图像特征向量描述、匹配特征点.在高速运动图像特征点匹配过程中,加入几何区域限定来完成识别.将所提方法模型与基于神经网络的高速运动图像自动识别模型和基于主成分分析的高速运动图像自动识别模型进行实验对比,证明了所提方法模型的有效性.所提方法为未来高速图像识别领域的研究与发展提供了一定的学术依据,但由于所提方法并未经过长时间、大面积使用,所以该方法的稳定性仍需进一步验证、改进,这也是未来研究的主要目标.
