基于SSIM的萃取液体检测分离系统设计
2021-09-27张砀砀胡剑虹万延见严雨绮梁明轩
张砀砀,胡剑虹,万延见,严雨绮,梁明轩
(中国计量大学机电工程学院,浙江杭州 310018)
0 引言
萃取反应是最常用到的化学工艺,萃取利用不同的溶剂有不同的溶解度来实现化学混合物的分离。它是化工生产中常见的一道工序,广泛应用到生活和生产过程中。萃取反应完成时,分层液体中密度大的在反应釜下方,密度小的在反应釜上层。分离分层液体以往都是由工人通过眼睛盯着反应釜下方管道中的观察视镜来观察管道内流动的分层液体,从而人工控制分液阀门的关闭,使两种不同的液体分离,此方法虽然简单,但是时间成本高,由于是人工一直观测非常容易导致疲劳,导致反应不及时引起主观误差。有些液体易挥发或腐蚀性较强,对人体伤害较大,对操作者来说具有安全隐患,受人工的影响较大,分液质量难以保证。使用机器视觉技术实现无接触自动检测分离液体,不仅能够提高产品的检测速度和分离质量,而且能够避免人工分离液体带来的偏差[1]。
本文设计了基于SSIM的萃取液体检测分离系统,通过机器视觉技术完成对分层液体特征的在线检测,判断观察视镜中是否出现异常,从而及时关闭阀门,可以代替人工检测,提高检测的效率和质量,由于在实验室进行实验,无法使用实际环境中的化学溶剂,实验时用水和油来模拟萃取反应后分离操作。
1 系统总体结构设计
1.1 视觉检测结构布局
进行分层液体分离,从打开阀门时起,工人就需要一直关注着观察视镜,直至分层异常界面到达观察视镜,所以机器视觉需检测的内容就是检测观察视镜。图1为设计的观察视镜结构分布示意图。结构设计简单可靠,能够很好地监控到观察视镜的画面。
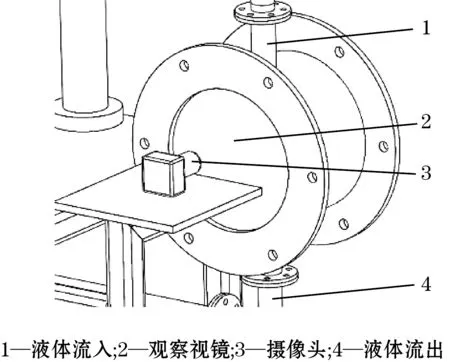
图1 观察视镜示意图
1.2 系统机械结构整体布局
为了实现所需功能,使在实验室获得和实际生产环节相似的环境和方便进行实验的思想原则下,进行了整体系统的设计。设计的液体分离系统的机械结构如图2所示[2]。
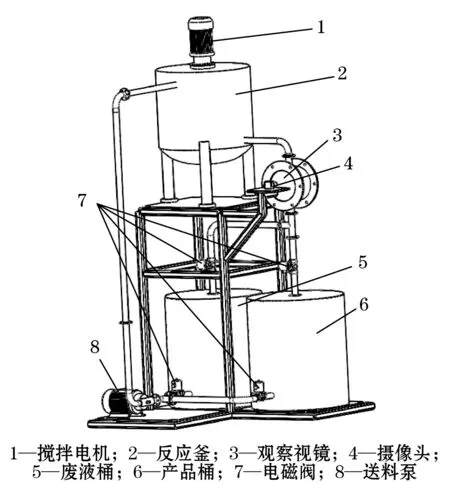
图2 实验整体系统示意图
工业相机安装在观察视镜正前方,圆形光源安装在观察视镜背面。与实际设备相比只需要在以往人工观察视镜的地方加上工业相机架就可以进行工作,体现了采用视觉设备的便捷。
2 系统软件设计
根据液体分离控制的要求,设计了视觉控制系统,视觉控制系统整体数据传输概图如图3所示。在控制系统设计中,采用了PC上位机作为主要的控制处理中心,上位机与工业相机通过串口实现图像传输,同时上位机也采用串口通信的方式与STM32单片机进行信息传输和控制。单片机通过I/O口控制继电器来控制24 V电磁阀,从而控制系统液体管道的导通和截断[3]。
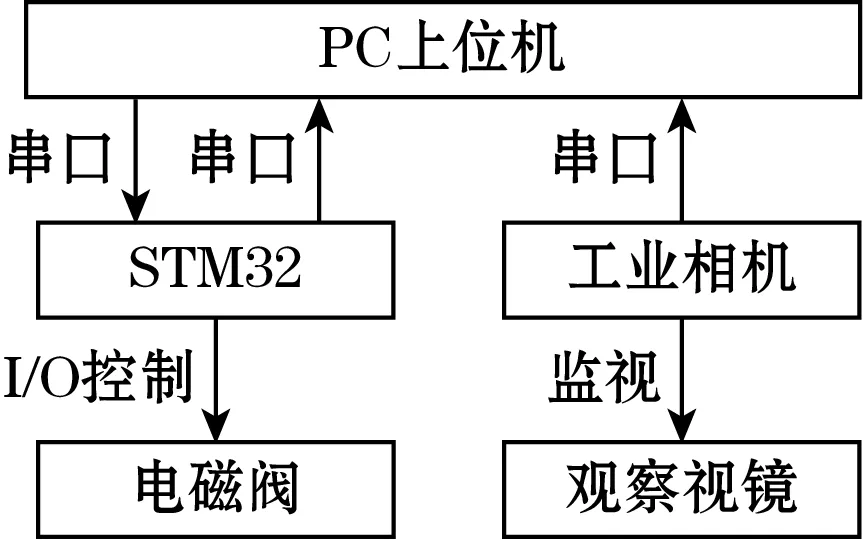
图3 观察视镜示意图
2.1 控制软件系统设计
控制软件系统是整个系统的关键。当系统启动时,软件系统需要通过串口连接单片机和工业相机进行一些初始化的设置。控制依次打开摄像头和发送控制指令给单片机[4]。等摄像头打开和单片机执行指令后系统正式开始运作,系统的总流程图如图4所示。
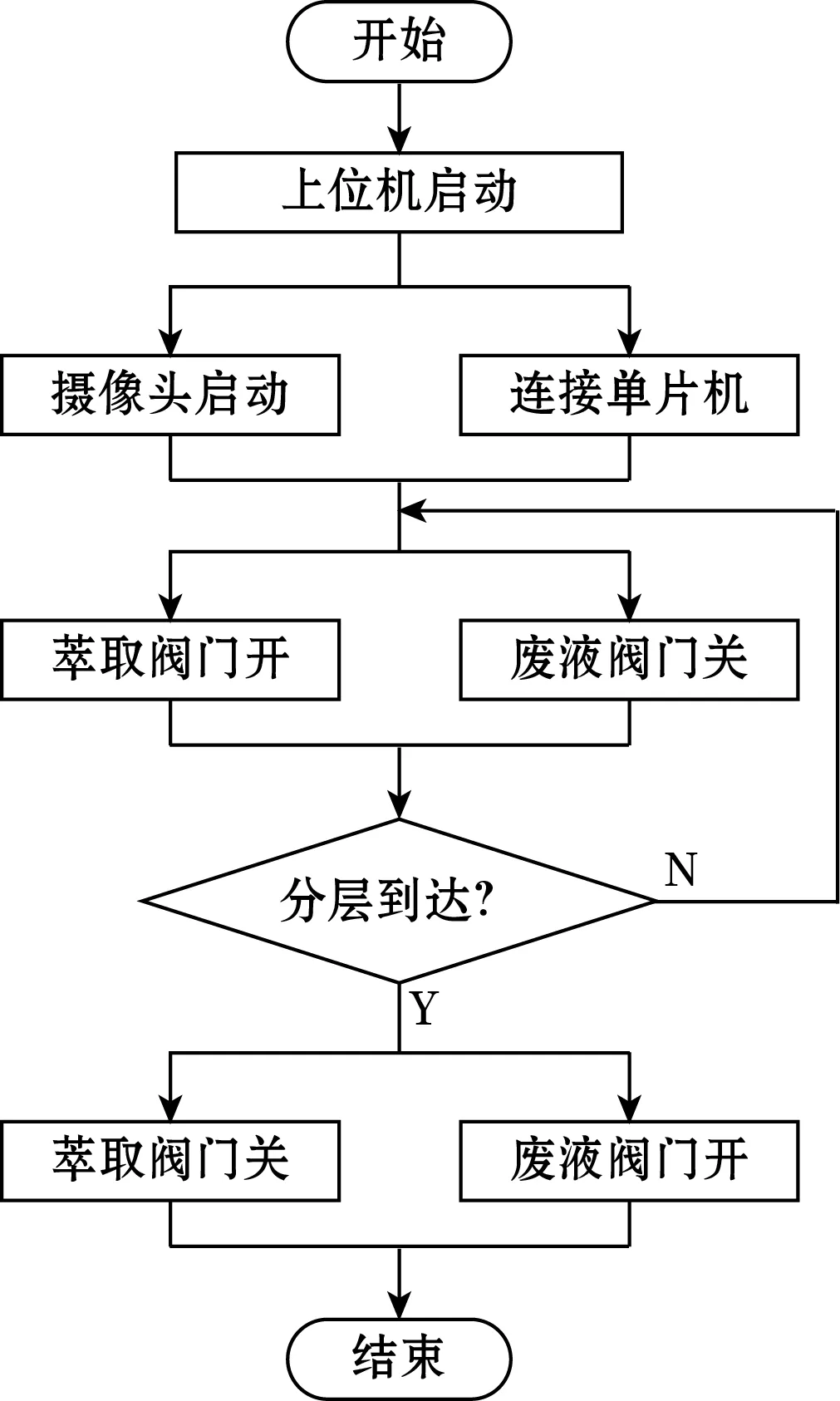
图4 总流程图
2.2 图像预处理与ROI分割
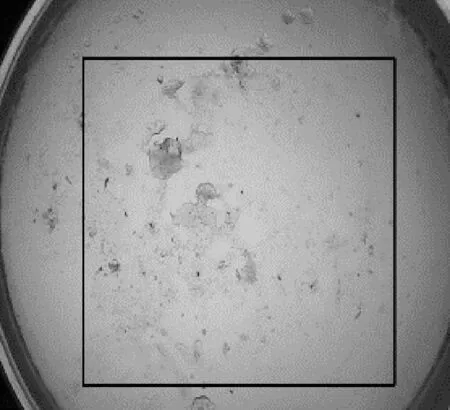
由于工业摄像头采集的是彩色图,占用内存大,对后续处理有诸多不便。为了下一步的算法实现,需要先对采集的监控画面进行图像预处理,能够使下一步处理更加直观和方便。图像预处理包括:ROI分割、图像灰度化、滤波去噪[5]。原始图像如图5(a)所示,视镜上被污染的一部分是由于系统运行会导致浓度大液体在观察视镜残留导致。图像中有用处的部分只占了整体图像的一部分,为了减少系统的运算开销,先对ROI(感兴趣区域)进行分割,如图5(b)。对ROI区域进行灰度化,把彩色图像转换成灰度图像,如图5(c)。根据实际情况,对于图像中的噪声问题采用了3×3模板的中值滤波的方法[6]。其数学表达式如下:
(1)
式中:G(x,y)为中值算法运算后的像素值;M为模板内像素数量;s为模板所覆盖的所有像素点;f(x,y)为模板所覆盖的像素点,处理过的滤波图如图5(d)所示。
2.3 基于OPENCV的检测算法设计
在阀门打开,液体开始流动时,在观察视镜内同一液体基本不会产生很大波动,偶然会有小气泡,通过图像预处理基本可以去除,当分液层从观察视镜出现时,观察视镜内的液体状态会剧烈变化,根据实际液体流动的特点,把这种剧烈变化的情况当成特征来设计算法。
(a)原始图像
2.3.1 SSIM结构相似性分析
结构相似性是一种衡量两幅图像相似度的指标。SSIM是0~1之间的数,SSIM越大,两图像间差异越小,SSIM的定义如式(2),结构相似性从图像组成的角度将结构信息定义为独立于亮度、对比度的反映场景中物体结构的属性,并将图像建模为亮度、对比度和结构3个不同因素的组合。
SSIM(x,y)=[l(x,y)]α·[c(x,y)]β·[s(x,y)]γ
(2)
用均值作为亮度的估计,其数学表达式如式(3):
(3)
标准差作为对比度的估计,其数学表达式如式(4):
(4)
协方差作为结构相似程度的度量,其数学表达式如式(5)[7]:
(5)
式中:μx,μy为图像所有的像素;δx,δy为图像像素值的标准差;δxy为x与y的协方差;C1,C2,C3为常数;α,β,γ为权重。
为避免分母为0时带来的系统错误,在实际应用中,令α,β,γ相等,令C3=0.5C2,则最终SSIM表达式如式(6):
(6)
基于如上数学表达式,进行程序编写,实验采用在系统运行时的视频为实验数据,视频共有484帧,通过对系统运行时未发生剧烈变化时的图像为基准,将采集的图像与基准图像对比,来计算结构相似度,测得的数据如图6所示。
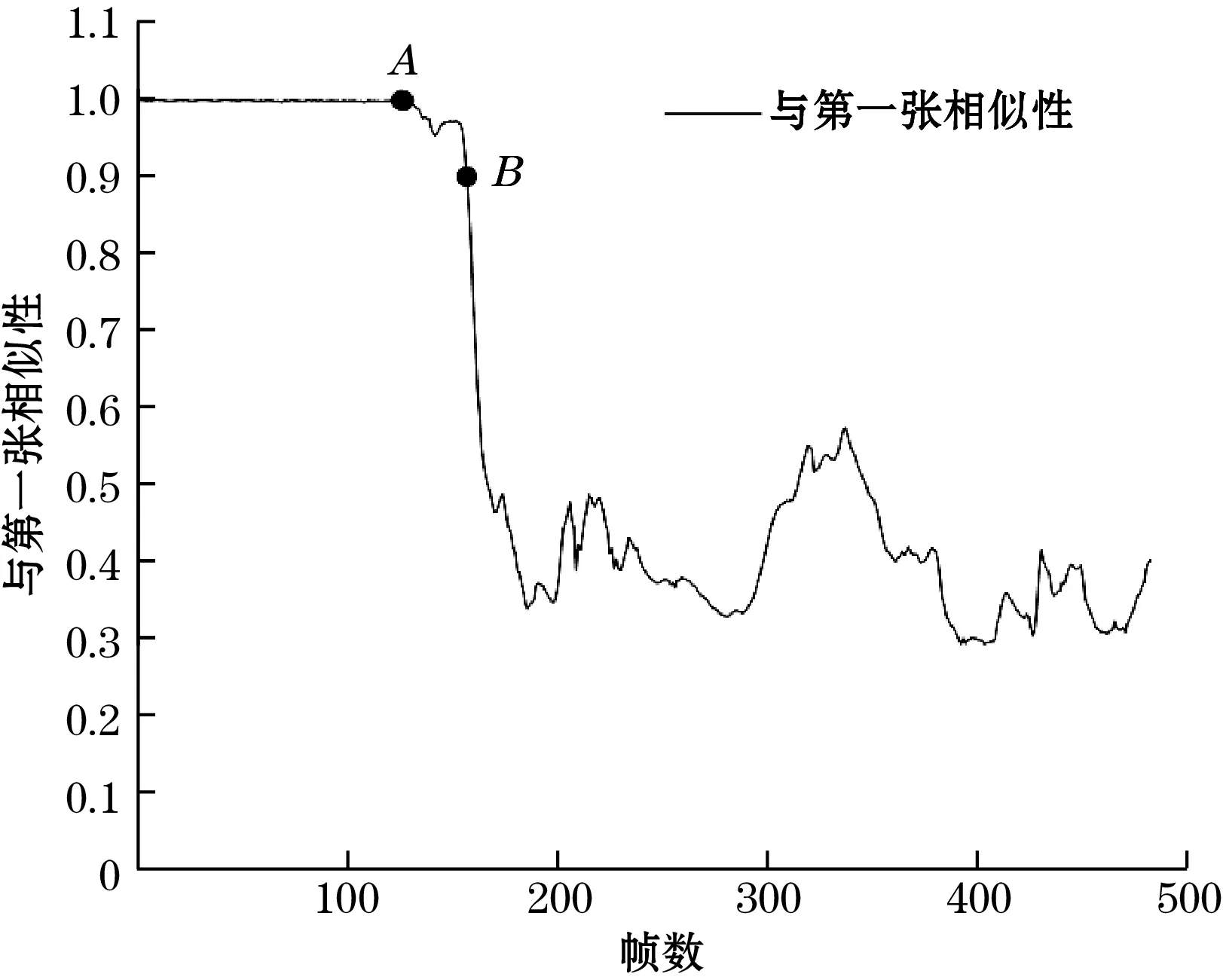
图6 SSIM相似度曲线图
图6中,在A点之前观察视镜内没有杂质或者分液层出现,结构相似度几乎不变,A点图像如图7(a)所示。A点过后观察视镜内开始出现微小杂质和波动,在B点上方处结构相似度急剧下降,说明分液层到达,使观察视镜内画面出现严重波动,B点图像如图7(b)所示。

(a)A点图
结构相似性能够很好地检测到画面的突变,但是一些震动或者杂质也会引起结构相似性明显变化。
2.3.2 灰度数据分析
灰度数据的分布能够很好地反映出一幅图片的信息,能够直观地反映出图像中各灰度级像素出现的频率与灰度级之间的关系。实验选取0~150区间灰度值为参考,计算出0~150灰度值像素数量占整体像素数量的占比如图8[8]所示。
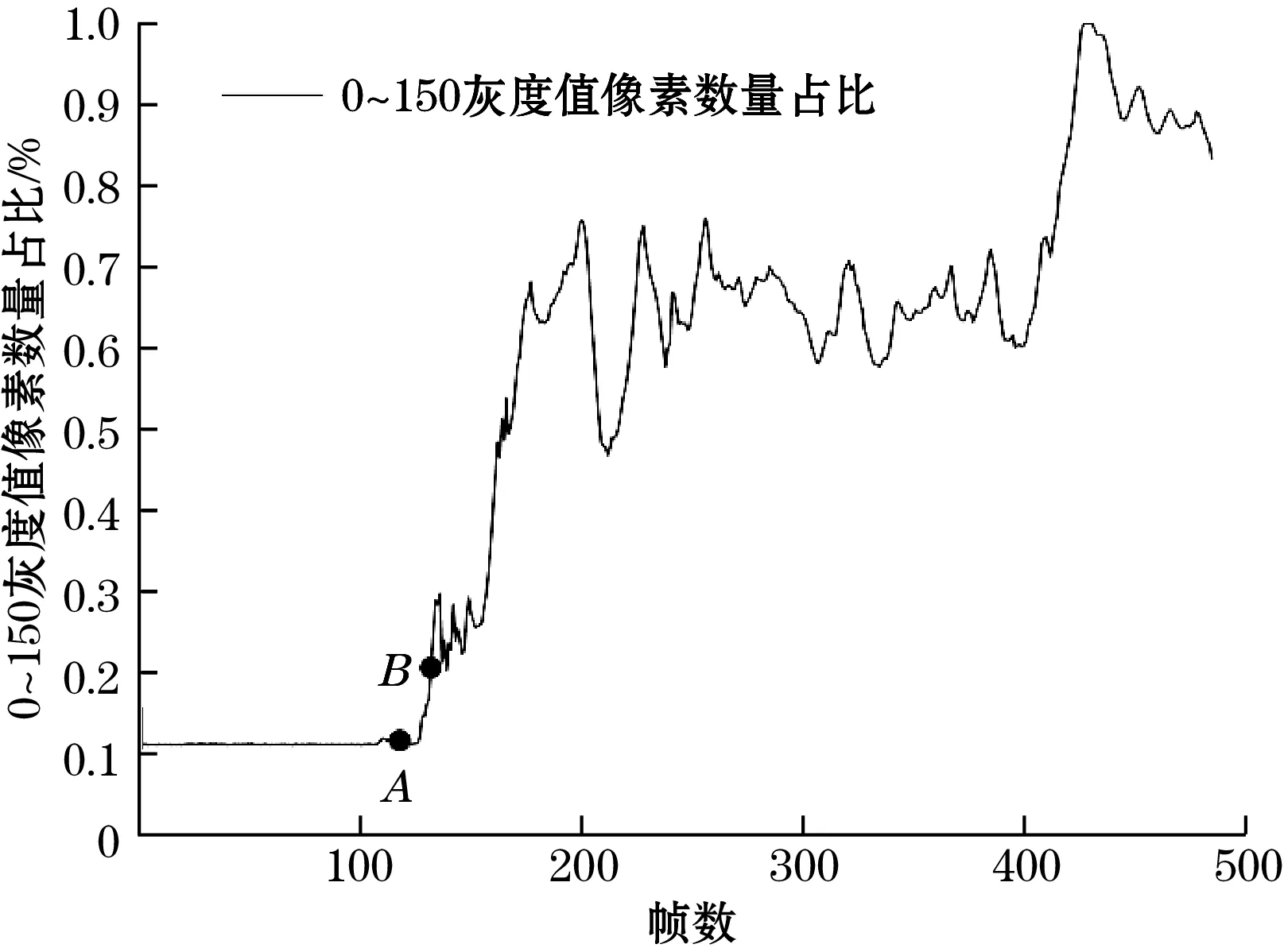
图8 0~150灰度值像素数量占比曲线图
从图8可以看到在A点之前观察视镜内没有杂质或者分液层出现,数据占比几乎不变,A点画面如图9(a)所示,在A点之后开始出现杂质和分液层,占比急剧提升,观察视镜内画面出现波动,B点画面如图9(b)所示。

(a)A点图
通过0~150灰度值占比能够有效检测到在这区段像素的突变,但是一些气泡或者干扰都有可能影响到区间灰度值占比。
2.3.3 综合设计
通过综合数据分析,结合以上两个算法的特点,通过计算SSIM相对于基准图像相似度变化百分比和区段灰度像素占比变化综合来设计总体算法。2个数据各自占比变化曲线如图10所示。

图10 占比变化图
在A点出现少量杂质为分液层到达前现象,A点画面如图11(a)所示,在B点为分液层杂质大量到达,B点画面如图11(b)所示。

(a)A点图
由实际测试数据分析,为2个占比变化设置10%的阈值,当2个占比的变化都满足设置的阈值,则判定杂质分液层到达,按照系统总流程图执行既定程序,图11中B点即为同时满足阈值时的画面。
3 上位机界面设计与实验分析
上位机为系统运行和操作提供了可视化界面。使用QT进行设计,界面提供了串口开关和摄像头控制按钮,能够实时接收控制信息。当连接到串口并打开摄像头按钮时,系统开始运作。图12为系统运行检测到分液层杂质大量到达的画面。
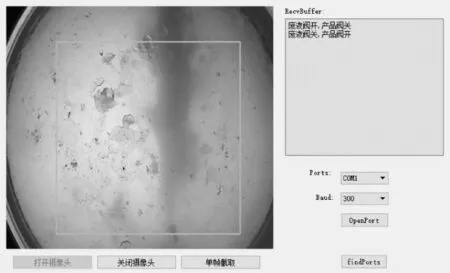
图12 系统运行界面
在测试中,系统运行速度达到80帧/s左右,能够满足实际实时监测控制的需求。为了验证阈值设置算法的合理性,进行了50次实验。结果表明均能够在大量杂质液体出现时成功判别,能够对油液混合液体进行分离,能够实现实验预期目标,满足实际生产需求。
4 结束语
针对现有化工液体萃取领域需要通过人工监视、开关阀门等操作来进行分离操作的不便,通过特殊区段灰度值的占比的变化和相似度的变化为图像算法基础,以工业电脑、工业相机、单片机为控制核心,设计了基于SSIM的萃取液体检测分离系统,通过实验分析,建立了能够分离分层液体的系统,证明了提出方法的有效性。由于实验是用水油分离来模拟化学萃取液体分离,具有一定的局限性,不同化学液体分离的具体阈值等参数还需要实际测试。总体来讲基于SSIM 的萃取液体检测分离系统能够为不同液体分离系统设计提供参考。
