融合转向差校正的磁强计地磁补偿硬件实现研究
2021-09-27何佳敏齐红丽雷华明吉小军
何佳敏,齐红丽,雷华明,吉小军
(1.上海交通大学电子信息与电气工程学院,上海 200240;2.中国船舶重工集团公司第704研究所,上海 200031)
0 引言
在磁场测量领域,磁通门磁强计凭借其较高的灵敏度、精度和低成本、安全可靠等特点被广泛应用。三轴磁通门磁强计更是可以直接测得空间任意点的3个正交磁场分量,以获得磁场的完整信息[1]。在使用磁强计对空间中的磁异常目标进行探测时,测得的磁场信号通常为地磁场信号与磁异常信号的叠加。一般地磁场大小范围在40~60 μT,而磁异常信号大小根据磁强计与目标之间距离的不同常小于1 μT,地磁场信号远大于磁异常信号[2]。此外,受制造工艺等因素影响,三轴磁强计还存在三轴非正交、灵敏度和零点等误差,这些误差使得磁强计在恒定磁场下以任意姿态旋转时输出的总磁场不恒定,引起所谓的“转向误差”。测量过程中磁强计自身的晃动和旋转导致的转向误差也会叠加在测量输出信号中,严重制约探测距离和探测精度。
为了减少地磁场等背景磁场对微弱磁异常信号探测造成的干扰,章志涛等提出了基于三端式磁通门的磁力梯度仪[3],该梯度仪采用双磁通门探头的结构形式,实现了对背景磁场和磁场梯度的闭环测量,但没有校正磁通门本身存在的转向差;高翔等提出了基于线性神经网络的转向差校正算法[4-5],建立了单个三轴磁强计转向差的校正模型,并对构成磁力梯度仪的两个磁强计的非同轴误差进行了校正,但没有考虑到两个磁强计之间的灵敏度差异;黄玉等提出了基于函数链接型神经网络的校正算法[6-7],构建了上述几种误差的校正模型,具有一定的理论研究价值,但校正过程需要在上位机采集到传感器的输出数据后利用软件进行校正,实时性较差,且部分校正参数的获得需要严格的实验环境,难以应用于工程实际测量。
基于实际的工程应用需求,本文提出了一种由间隔一定距离的两个三轴磁通门磁强计(分别作为测量端和补偿端)构成的实时动态地磁补偿系统[13]。工作过程中,系统将两磁强计对应敏感轴的输出通过模拟电路进行实时差分处理以减小地磁场影响,提高对磁异常信号处理的增益范围,同时针对两磁强计本身存在的转向误差和灵敏度差异,本文采用神经网络校正算法估计误差参数,并通过模拟电路融合在地磁动态补偿过程中完成,从而实现对微小磁异常目标的远距离、实时、高精度检测。
1 三轴磁强计转向差校正模型建立
设理想三轴磁强计的测量坐标系由3个相互正交的敏感轴OX0、OY0、OZ0构成,受制造工艺影响,实际三轴磁强计的测量坐标系由3个非正交敏感轴OX、OY、OZ构成,二者关系如图1所示。为便于建立校正模型,以OZ轴为基准轴,YOZ平面为基准平面,对实际三轴磁强计的测量坐标系进行校正。假设OZ0轴与OZ轴重合,OY轴在平面Y0OZ0内,且与OY0轴夹角为α。OX轴与平面X0OZ0的夹角为β,OX轴在平面X0OZ0上的投影与OX0轴的夹角为γ。设理想磁通门磁强计的三轴输出分别为BX0、BY0、BZ0,实际磁通门磁强计的三轴输出分别BX、BY、BZ。
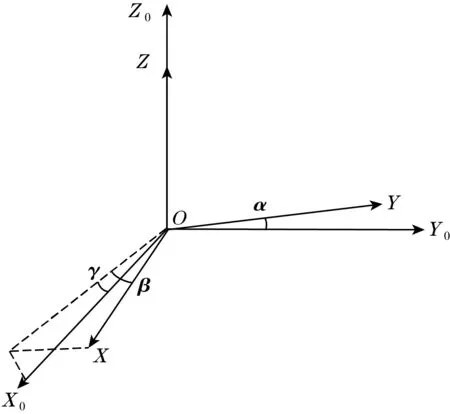
图1 理想坐标系与实际坐标系的关系
由图1可得:
(1)
考虑到实际磁强计的三轴敏感元件灵敏度以及激励和信号提取电路特性参数不可能完全相同,导致三轴测量的灵敏度不同,输出信号也存在零点误差。为了便于分析,设磁强计OZ轴的灵敏度为1,OX轴和OY轴相对OZ轴的相对灵敏度为KX和KY,三轴的零点误差分别为bX0、bY0、bZ0。磁强计实际输出与理想输出之间的关系可表示为[8-12]
(2)
即
B=K·S·B0+b0
(3)

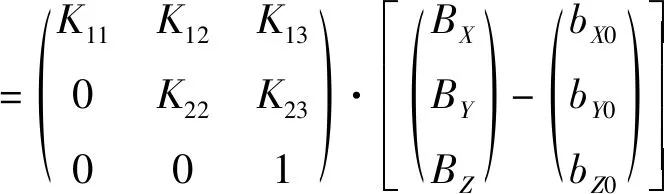
(4)

由式(4)可知,要想对实测值B进行校正得到校正值B′,需要求得K11、K12、K13、K22、K23、bX0、bY0、bZ08个误差参数,它们在测试系统建立完成后表现为固定的系统误差参数,可以利用实际测得的磁场数据,建立神经网络校正模型来得到其估计值。将式(4)展开可得:
(5)
(6)
(7)
可以认为经校正后的单个磁强计三轴输出互相正交,灵敏度相同(同校正前的Z轴)且没有零点误差。
传统的转向差校正多采用软件校正的方法,需要先将磁强计的实测信号B采集到上位机后再用软件算法进行校正,存在事后处理等问题,无法满足现场实时动态检测的技术要求。此外,在某些场合下,若上位机采集的信号不是磁强计的实测信号(如两个磁强计对应敏感轴输出的差分信号),则无法使用软件对单个磁强计的转向差进行校正。为此,本文提出采用硬件电路方式实现转向差校正,单个磁强计转向差硬件校正电路结构框图如图2所示,其中加法电路和放大电路均由运算放大器构成,三轴零点误差bX0、bY0、bZ0为恒定值,在电路中对应的恒定电压由基准电压通过电阻网络分压得到,5个放大电路的放大倍数根据5个系统误差参数K11、K12、K13、K22、K23的值进行调节。
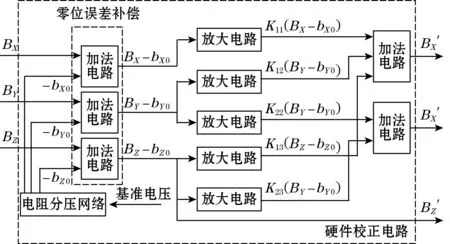
图2 单磁强计转向差硬件校正电路框图
2 融合转向差校正的地磁补偿硬件系统构建
地磁是影响磁强计测量精度的另一重要因素,因此需要对地磁进行动态补偿。本文采用的地磁补偿系统由相距一定距离安装在刚性件上的2个三轴磁通门磁强计组成,分别作为测量端和补偿端。由于地磁场在一定区域内是均匀的,故可以认为系统在工作过程中测量端和补偿端磁强计所处位置的地磁场大小相同而目标磁异常信号不同(磁场梯度)。因此将测量端与补偿端磁强计对应敏感轴的输出在模拟电路部分进行差分,即可消除地磁信号,保留磁异常信号,在后续测量电路中对有效的磁异常信号进行增益调整至模数转换器的参考电压范围,这样可以极大地减小地磁信号和噪声对磁异常信号的干扰,实现对微小磁异常目标远距离和实时高精度检测。由于上位机最终采集到的是2个磁强计对应敏感轴输出的差分信号,故需要在信号差分之前采用第一节所设计的硬件转向差校正电路分别对两个磁强计的三轴输出进行校正。
在地磁补偿系统中,两个磁强计对应敏感轴的不同向或灵敏度不同也会影响地磁补偿的效果。在两个磁强计分别进行转向差校正后,可认为单个磁强计的三轴输出互相垂直且灵敏度相同,但两个测量坐标系之间存在不同轴和灵敏度的差异,因此实际应用中还应做进一步的联合补偿。

(8)
(9)
(10)
地磁补偿系统的硬件实现结构如图3所示。首先2个磁强计的三轴原始输出均需要经过硬件校正电路进行转向差校正,同时测量端磁强计的三轴校正输出还需要经过由运算放大器构成的放大电路以统一两个磁强计的灵敏度,放大电路的放大倍数为相对灵敏度K2。最后将处理后的6路磁强计信号输入到差分放大电路,使得信号采集电路采集到的是差分信号ΔBX、ΔBY和ΔBZ,从而实现式(6)所示的补偿原理。
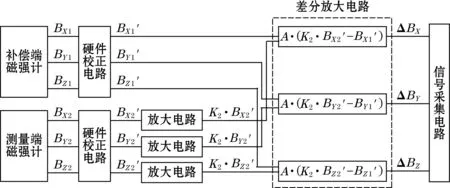
图3 地磁补偿系统硬件实现结构框图
3 实验验证
根据上述技术路线和系统实现的结构原理框图,本节采用硬件方式实现了对单个磁强计的转向差自校正和地磁补偿系统中2个磁强计的灵敏度互校正以及动态地磁补偿,并通过实验对比了软件和硬件2种转向差校正方法的校正效果以及地磁补偿系统在有无校正电路接入情况下的地磁补偿效果,最后比较了单磁强计和地磁补偿系统对磁异常信号的探测效果。
3.1 单个磁强计软件和硬件转向差校正效果对比
本实验的实验场所选择在作者所在单位某空旷场地,远离道路、电线、建筑等可能会使磁场产生剧烈波动的干扰源,可认为在测试过程中,磁强计所处位置的磁场是恒定的。将三轴磁通门磁强计通过电缆连接到接口电路,接口电路驱动磁通门磁强计,同时将磁强计的输出转化为和待测磁场大小成正比的直流电压,最后通过串口将测量值传输到上位机进行保存[14]。将磁强计放置在某一特定位置以任意姿态旋转,同时上位机记录输出,记录时间约30 s,记录300组数据。
若在磁场恒定的条件下以任意姿态旋转三轴磁强计,理想三轴磁强计输出的总磁场值是不变的,等于理论总磁场值。但由于误差的存在,三轴磁强计实际输出的总磁场值随姿态的变化在理论总磁场值上下波动。因此,可以利用实际测得的总磁场数据,建立神经网络校正模型,得到第一节所述8个误差参数的估计值。
将用于构建地磁补偿系统的2个磁强计分别进行上述实验,得到的误差参数估计值如表1所示,并通过软件对测得数据进行转向差校正。得到校正前后总磁场波动幅值对比如表2、图4和图5所示。可以看出,经过软件转向差校正后,每个磁强计测得的总磁场最大波动幅值大幅度减小,证明了该校正算法的有效性,其误差参数的估计值可以作为硬件校正电路参数的设计依据。

表1 转向差校正参数估计值

表2 单磁强计转向差软件校正和硬件校正效果对比

图4 测量端磁强计软件转向差校正前后总磁场波动

图5 补偿端磁强计软件转向差校正前后总磁场波动


图6 测量端磁强计硬件转向差校正前后总磁场波动

图7 补偿端磁强计硬件转向差校正前后总磁场波动
(1)8个误差参数的估计值与真实值之间存在差异;
(2)磁强计在以任意姿态旋转时,所处空间中的磁场大小存在微小变化;
(3)受实验条件的限制,对硬件校正电路参数的调节存在误差。
3.2 融合转向差校正的地磁补偿硬件实现
分别将测量端和补偿端磁强计静止放在相同的均匀恒定磁场下,在有硬件转向差校正的情况下计算2个磁强计输出的总磁场大小比值,认为该比值是两磁强计的相对灵敏度K2,实验测得K2=1.164。基于式(6)和图3调节硬件电路参数,令差分放大电路的放大倍数A=1。将测量端和补偿端磁强计相距30 cm固定在无磁铝制安装构件上,如图8所示,构成地磁补偿系统,并在户外场地进行测试,认为该测试场所无明显干扰源且磁场梯度为零。

图8 实时动态地磁补偿系统
然后实验测试在采用和不采用硬件校正电路2种情况下进行,记录系统在2种不同姿态下的三轴差分输出,结果如表3所示。可以看出地磁补偿系统在每个磁强计转向差硬件校正和灵敏度互校正后,其每一轴的差分输出较校正之前有明显减小,校正后的地磁补偿效果更为明显。导致补偿后输出不为零的原因可能有:
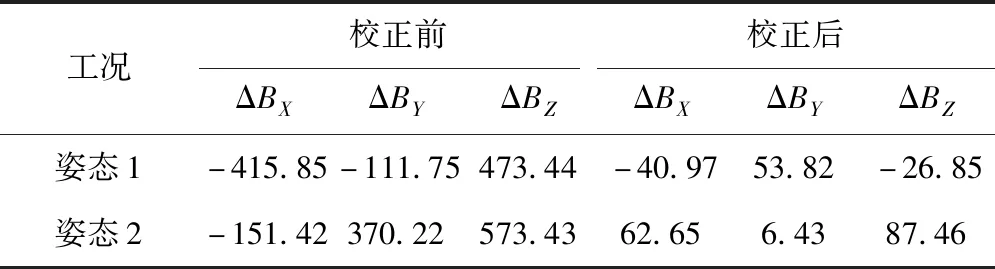
表3 地磁补偿系统硬件校正前后输出对比 nT
(1)受实验条件的限制,校正电路参数的调节存在误差;
(2)实验所处的场地磁场并非完全均匀;
(3)地磁补偿系统两磁强计安装存在一定的同轴度误差。
3.3 微小磁异常探测实验
将地磁补偿系统静止放在3.2节所述实验环境下,实验者携带磁性物体从测量端磁强计前方约3 m处经过2次,行走路线垂直于无磁铝制安装构件。图9(a)为单个磁强计在未进行地磁补偿时的测试结果,可以看出三轴输出均无明显变化,无法识别由磁性物体所引起的磁异常信号。
采用地磁补偿系统后,调节差分放大环节的增益系数,并进行上述相同实验,得到三轴输出结果如图9(b)所示。可以看出地磁补偿系统的输出可以明确地反映出磁性物体2次经过时产生的磁异常信号。

(a)未做地磁补偿的磁异常探测结果
4 结论
本文提出了一种融合转向差校正的实时动态地磁补偿系统,该系统由2个三轴磁通门磁强计和硬件校正电路组成。通过实验可以得知,硬件转向差校正效果略差于软件转向差校正,但依然有较好的校正效果,且上位机在采集到磁强计的输出信号之后不再需要进行后续处理,可以满足工程上实时、在线、动态的检测需求。融合转向差校正和灵敏度互校正的地磁补偿系统有更明显的地磁补偿效果,且该系统在进行磁异常探测和定位的过程中能显著减小地磁场对探测结果的影响,同时可以为微小的磁异常信号提供更大的增益范围,能够实时直观地从系统的输出判断磁异常目标的有无,提高磁异常目标探测的准确度和成功率。
