磁流体动力学微角振动传感器自动标定系统设计
2021-09-27侯小婷李醒飞
侯小婷,李醒飞,刘 帆
(天津大学,精密测试技术及仪器国家重点实验室,天津 300072)
0 引言
MHD微角振动传感器最早是由美国ATA公司开发研制的,并已有诸多产品。其研制的ARS-12传感器可实现1 Hz~1 kHz带宽内角振动信号的高精度拾取(等效噪声角0.1 μrad),且已被作为磁流体动力学惯性基准(magnetohydrodynamics inertial reference unit,MIRU)的角振动敏感元件,成功应用到LLCD中实现系统视轴的对准[3]。国内对MHD微角振动传感器的研究起步较晚,华南理工大学[4]、上海交通大学[5]、天津大学[6]等单位均在开展相关研究。国内MHD微角振动传感器的研究主要围绕结构设计、微弱信号检测、误差分析等展开,目前还停留在样机研制阶段。在MHD微角振动传感器的研制过程中,需要对其频带(3 Hz~1 kHz)内的标度及线性度等指标进行测试,这就需要相应的角振动激励装置和角振动测量装置。然而,目前高频角振动激励装置大都实现的是恒定电压控制即恒定力矩控制,而非MHD角振动传感器测试所需的恒定角速率控制。
本文利用105-AVT角振动台和XL-80激光干涉仪搭建了一套适用于MHD微角振动传感器的自动测试标定系统。通过建立105-AVT角振动台模拟控制电压与输出角速度之间的关系,并集成到LabVIEW软件中,实现了25 Hz~1 kHz内0.004~0.12 rad/s量级的恒定角速率输出。测试系统能够对MHD微角振动传感器的频响特性及输出线性度进行自动测试。
1 MHD微角振动传感器原理
MHD微角振动传感器原理如图1所示,导电流体灌装于与壳体固连的环形通道内,通道的上下表面绝缘,内外表面导电,且置于磁场B中。磁场B由与壳体固连的永磁体提供。
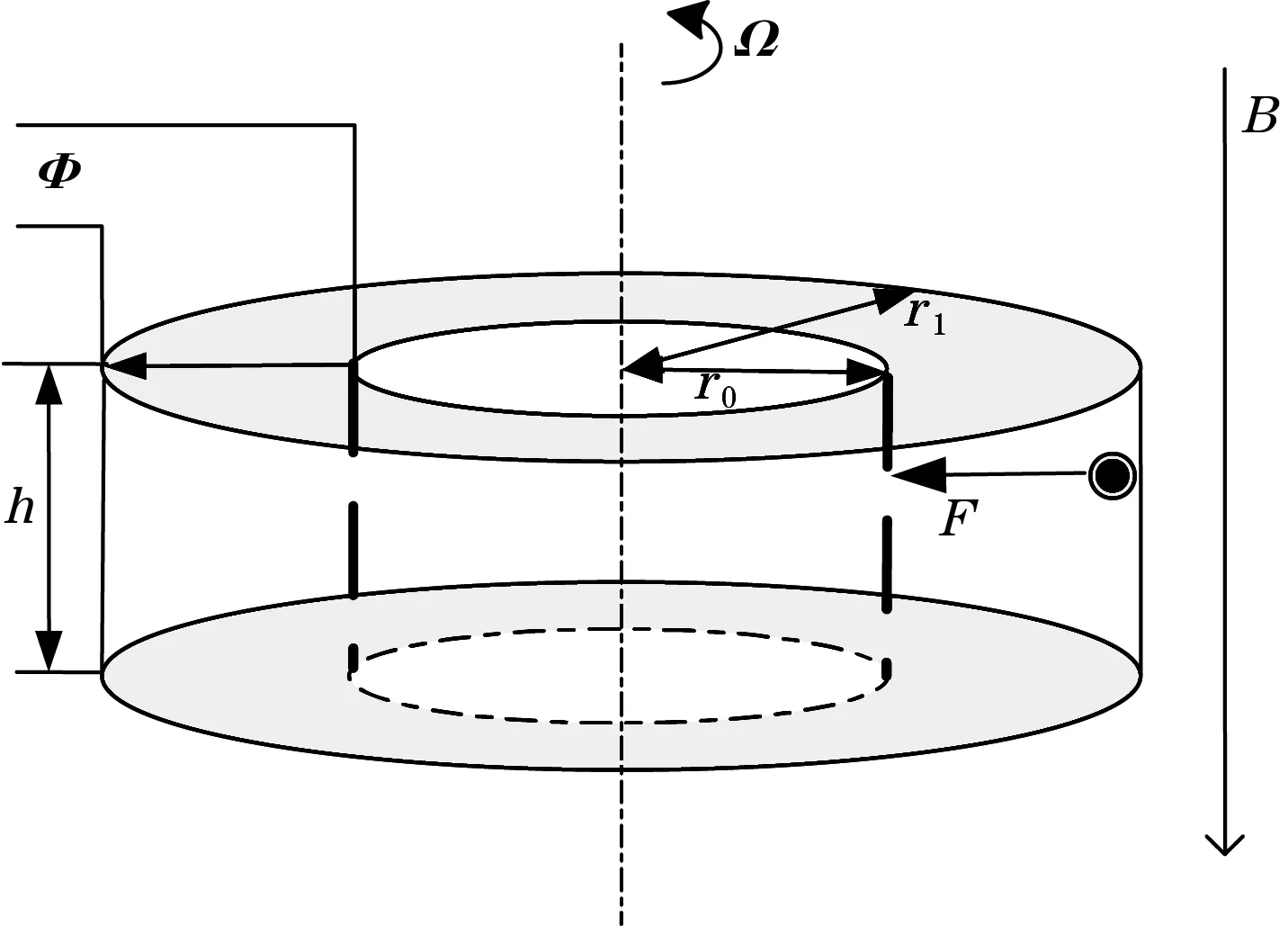
图1 MHD微角振动传感器工作原理
当载体以角速度Ω转动时,导电流体由于惯性与惯性空间保持相对静止,从而与旋转的磁通量形成相对流速,切割磁力线[7]。根据电磁感应定律,流体通道内外壁间产生的感应电动势Φ与输入角速度Ω成正比,满足以下关系[8]:
(1)

式(1)所示的传递函数表明,MHD微角振动传感器频响曲线近似为“高通”特性。
2 恒定角速率激励输出
2.1 105-AVT角振动台
105-AVT角振动台由振动台体和控制器组成,如图2所示。根据不同的配置,角振动台可在输入电压Uin的激励下输出角速度Ω0,输出角加速度α,电机电枢电流I等参数。
例4 氯气和二氧化硫都有漂白性,若将等物质的量的这两种气体同时作用于潮湿的有色物质,可以观察到有色物质( )。
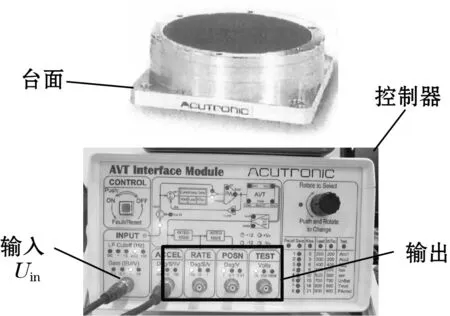
图2 105-AVT角振动台
105-AVT角振动台内部由力矩电机驱动,在内部电流环的作用下实现恒定电流控制即恒定转矩控制。105-AVT角振动内部控制框图如图3所示,其中K1为电流调节增益,K2为积分器调节增益。

图3 电流环流程图
恒定电压激励下,角振动台空载时内部扭矩电机电枢电流I与台面转动角加速度α随频率变化曲线如图4所示,电机电枢电流I与输入模拟电压间的关系如图5所示。
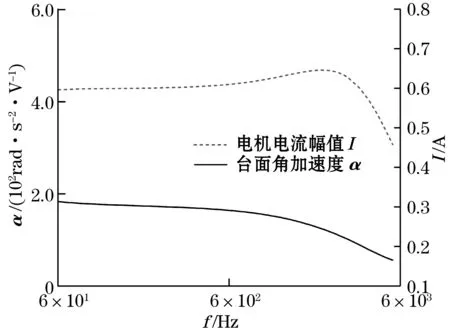
图4 电机电流I、角加速度α与频率f关系
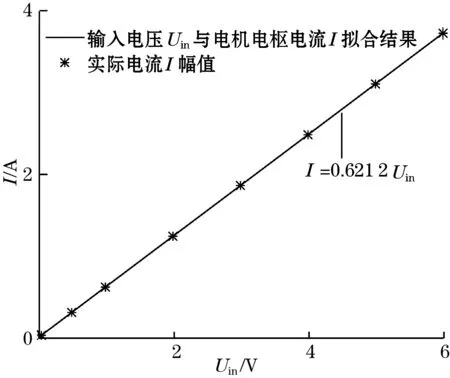
图5 电机电枢电流I与输入模拟电压Uin间的关系
由上图可知,5 kHz频带内,105-AVT角振动台内部电机电枢电流I基本保持恒定,即扭矩电机输出恒定转矩。恒定负载下,角振动台输出角加速度保持恒定[8]。另外,角振动台输入控制电压Uin与电机电枢输出电流I成正比例关系,即与振动台输出角加速度α成正比。然而,受限于内部驱动器的带宽,当激励电压频率大于5 kHz时,电机电枢电流逐渐衰减,恒定负载下输出的角加速度也会随之衰减。上述分析可知,105-AVT角振动台在5 kHz带宽内可以提供与激励电压成比例的恒定角加速度输出,而台面角速度Ω是由角加速度α积分得到,如式(2)所示,角速度幅值会随着激励频率的改变而变化。
(2)
2.2 角速率及频率激励控制
为了实现105-AVT角振动台宽频带下的恒定角速率激励,对角振动台输入电压与输出角速度的关系进行了实验研究。基于角振动台在不同负载下的扫频响应,建立了输入模拟电压与输出角速度的对应关系。将此转换关系集成至控制端,实现角振动台的恒定角速率输出。
实验中,将NI DAQ采集卡的一路模拟输出配置为角振动台的激励信号输入,利用2路模拟输入通道,同步采集激励电压信号和角振动台输出角加速度信号,并在LabVIEW中对角加速度信号进行积分,得到角振动台的输出角速度信息,并计算输出响应。将待测传感器及激光干涉仪相关镜组安装在角振动台的台面上,并通过工装保证传感器的敏感轴与角振动台的旋转轴重合,如图6所示。
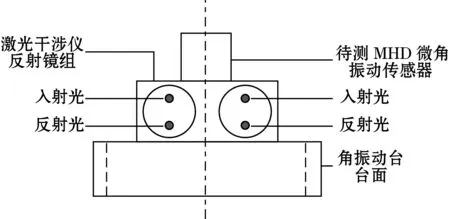
图6 待测传感器与反射镜组安装示意图
采用扫频法测试角振动台的频响特性(采样率为为50 kHz),可输出稳定的角振动信号的频率范围。读取1 kHz范围内特定的一系列频率(66、76、141、251、351、451、501、651、721、851、901、951、1 001 Hz)进行实验,角振动台在66 Hz及更大频率条件下输出角振动信号稳定。在每个指定频率下,以电压Uin=Usin(2πf)驱动角振动台旋转。同时,为了降低人工操作激励变换对实验结果的影响,实验中以频率数组作为循环条件,实现对特定电压幅值下,不同频率激励电压的自动索引,将其输出给角振动台的模拟激励端。
图7为105-AVT角振动台输出角速度幅值与激励电压的比值随频率的变化曲线。与角振动台响应与频率近似于对数线性下降的理论相吻合。
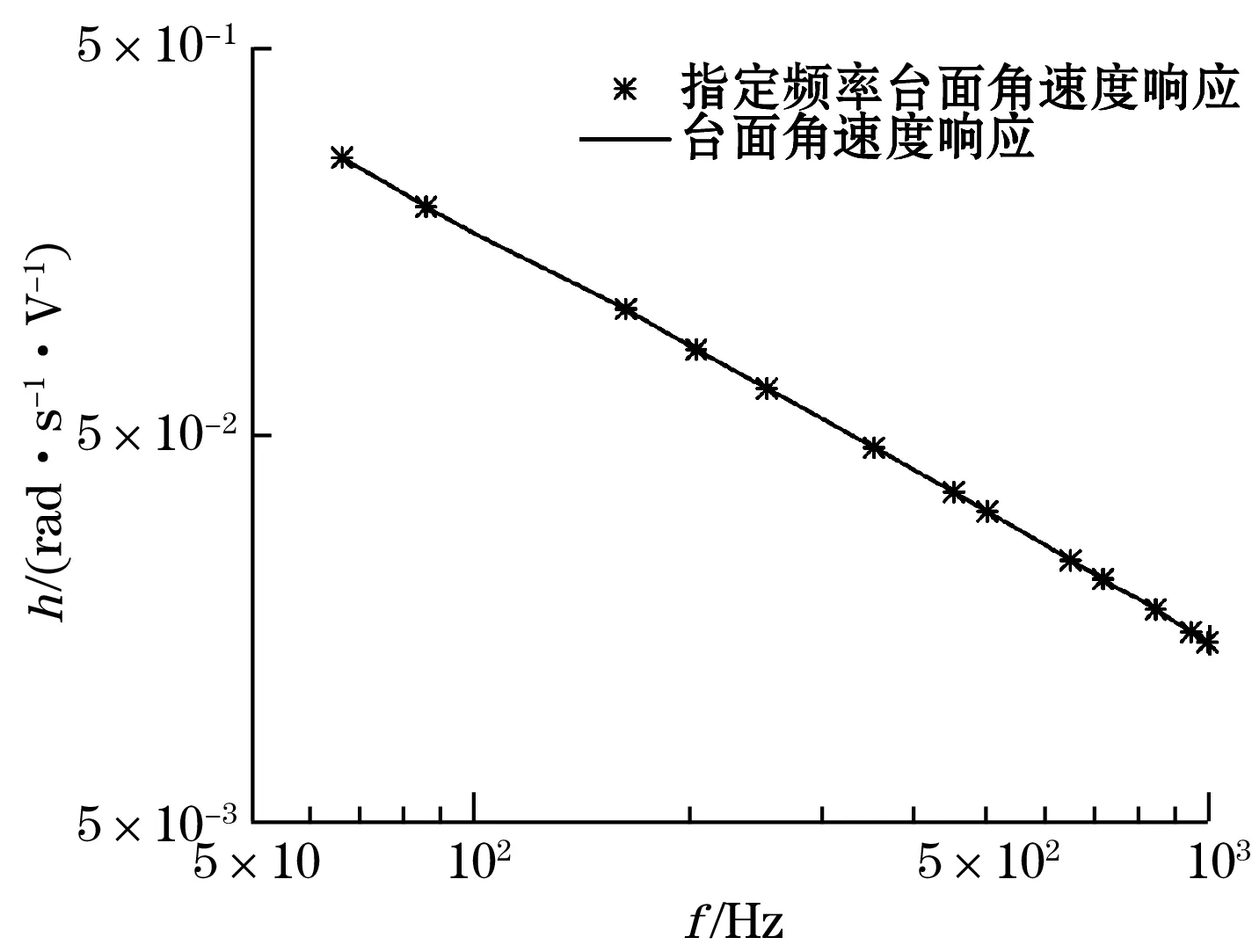
图7 角振动台台面角速度响应h随频率f变化
将曲线对应的数据点信息集成到LabVIEW软件中,实现恒定角速率激励对激励电压的自动索引,进而实现恒定角速率激励。
3 自动标定系统设计
根据上一章节的分析,设计了图8所示的MHD微角振动传感器自动标定系统,实现恒定角速率的循环激励及数据的自动采集和分析[10]。PC机内部角速度控制模块根据图7所示的转换关系实现对不同频率下特定角速率对所需激励电压的自动索引,并将激励电压输出至角振动控制器的激励信号端。台面产生恒定角速率激励后,PC机产生同步采集指令至A/D采集卡USB-6361与激光干涉仪,同步采集MHD微角振动传感器输出电压与台面角速度,采集数据通过USB接口保存至PC机指定位置。恒定角速度的循环激励环节以频率作为循环索引,循环激励完成后,PC机对采集的所有数据进行分类处理,得出MHD微角振动传感器的重复性、标度因数、线性度,并将结果文件自动保存至标定数据库。

图8 MHD微角振动传感器自动标定系统
使用激光干涉仪测量台面转动角速度,完成溯源。将激光干涉仪的反射镜组固定在角振动台台面上,根据待测光线通过角度反射镜组两个反射镜的光路差得出角位移。激光干涉仪的测量原理图如图9所示。
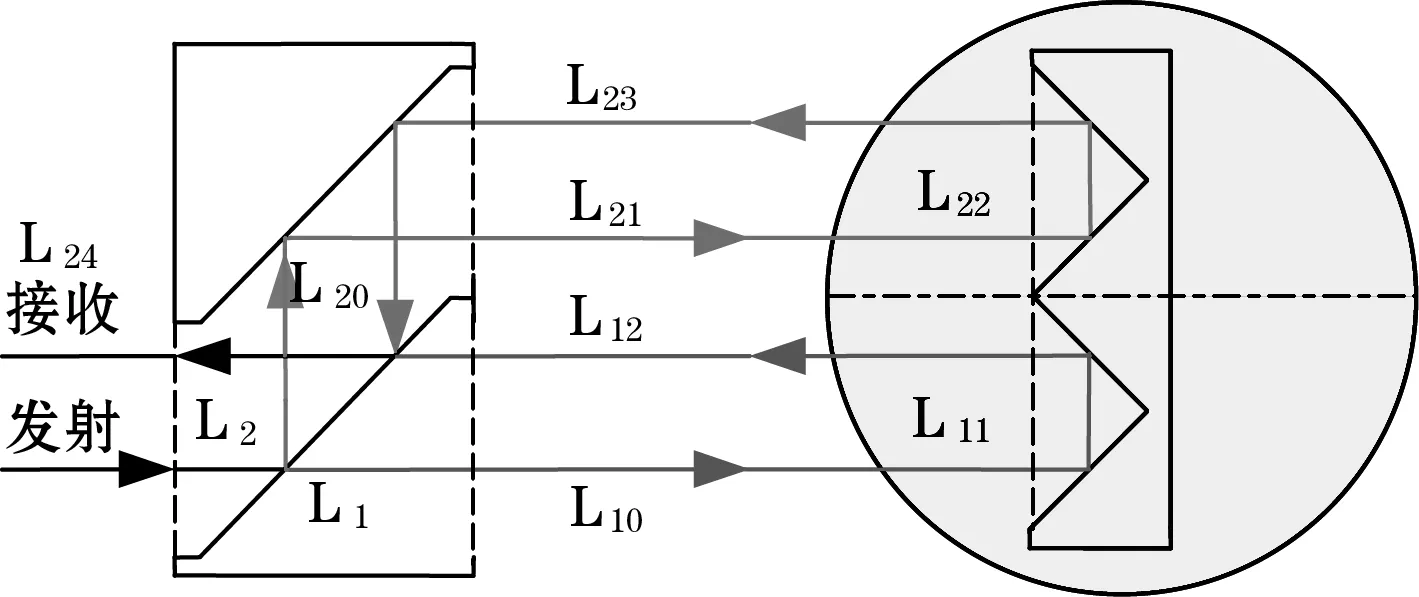
(a)平衡状态下的光路
入射光在分光镜处分成2路光L1和L2,L1和L2经过不同的光路,最终在分光镜处汇聚并发生干涉。初始对准状态[图9(a)]时,2路光束的光程差为恒定值。当激光干涉仪进入测试状态[图9(b)]后,光电接收器计算并得到2束光的光程差,输出相应的角位移波形。由几何计算可得,总光程差是2路光在反射镜的入射点和出射点之间的平行方向上的距离差,即有:
ΔL=2Rsinθ
(1)
式中:R为激光干涉仪分光镜中的2个镜片中心间距常数;θ为角位移。
激光干涉仪的输出值是角度值,通过USB口传输至PC机。
数据自动采集和分析环节利用采集卡同步采集MHD微角振动传感器输出电压φ及激光干涉仪XL-80所测的溯源角速度Ωs。在激励信号从某个频率点向另一个频率点切换后,根据所采集的数据计算对应频率下MHD微角振动传感器的标度及相位,并将数据自动保存至结果文件。待扫频采集完毕,对所有的数据进行处理,自动计算待测指标,从而完成MHD微角振动传感器的自动测试与标定。整体的标定时序以及数据交换如图10所示。由PC机控制角振动激励和数据采集与处理的时序与循环,通过USB接口进行数据的快速传输。
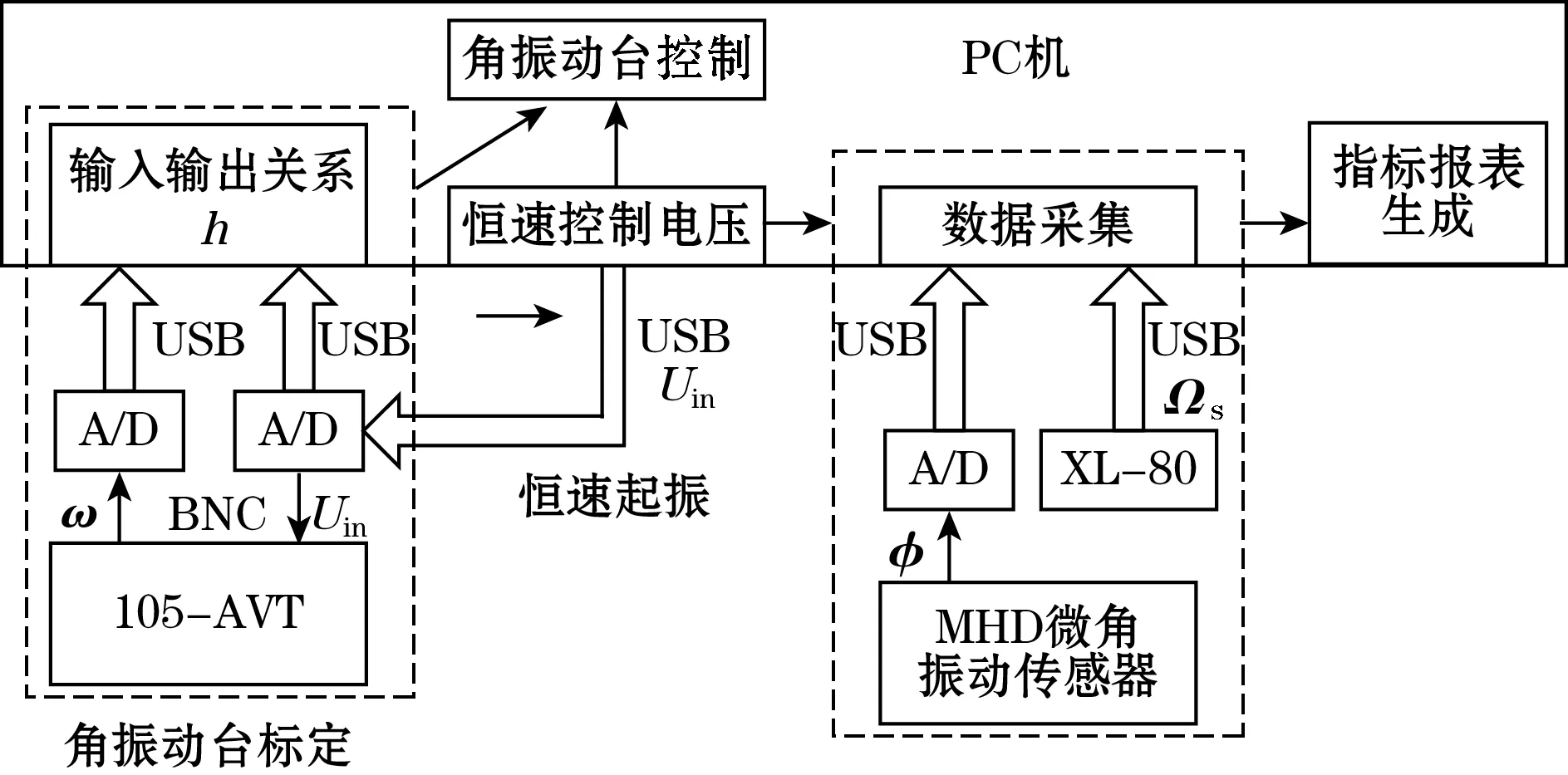
图10 自动标定时序框图
4 实验验证
依据系统设计搭建了如图11所示的实验平台,对MHD微角振动传感器样机进行测试标定。角振动台的激励电压以及输出角加速度均通过同轴线缆与采集卡的模拟通道相连。MHD微角振动传感器的输出电压接至采集卡模拟输入端。MHD微角振动传感器与激光干涉仪的反射镜固联在105-AVT角振动台台面上,通过工装保证传感器的敏感轴、反射镜中心轴、角振动台旋转轴三轴合一。
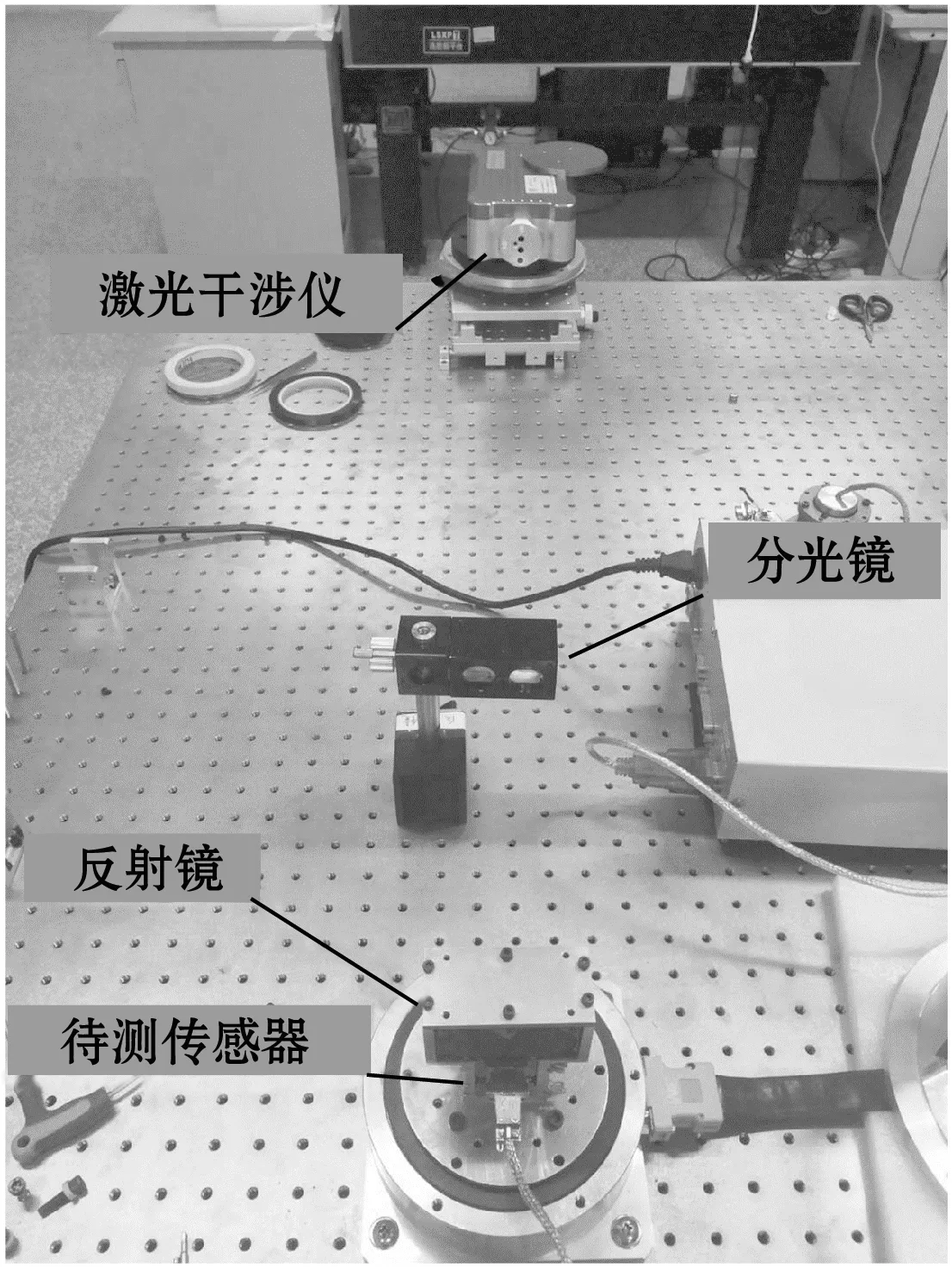
图11 测试系统实物图
此外,完成安装后,需要调节激光干涉仪的激光探头和分光镜及反射镜之间的相对位置,在保证激光干涉仪光路与角振动台台面平行的基础上,提供相对稳定的测试光路。
在进行测试标定实验之前,首先对角振动台的角速度输出精度进行测试。设置角振动台提供微角速度幅值为0.015 rad/s、频率范围为65 Hz~1 kHz的扫频激励。激光干涉仪检测角速度幅值,结果如图12所示。可见,角振动台输出角速度幅值在65 Hz~1 kHz内基本稳定。使用激光干涉仪输出角速度作为传感器标定的基准。
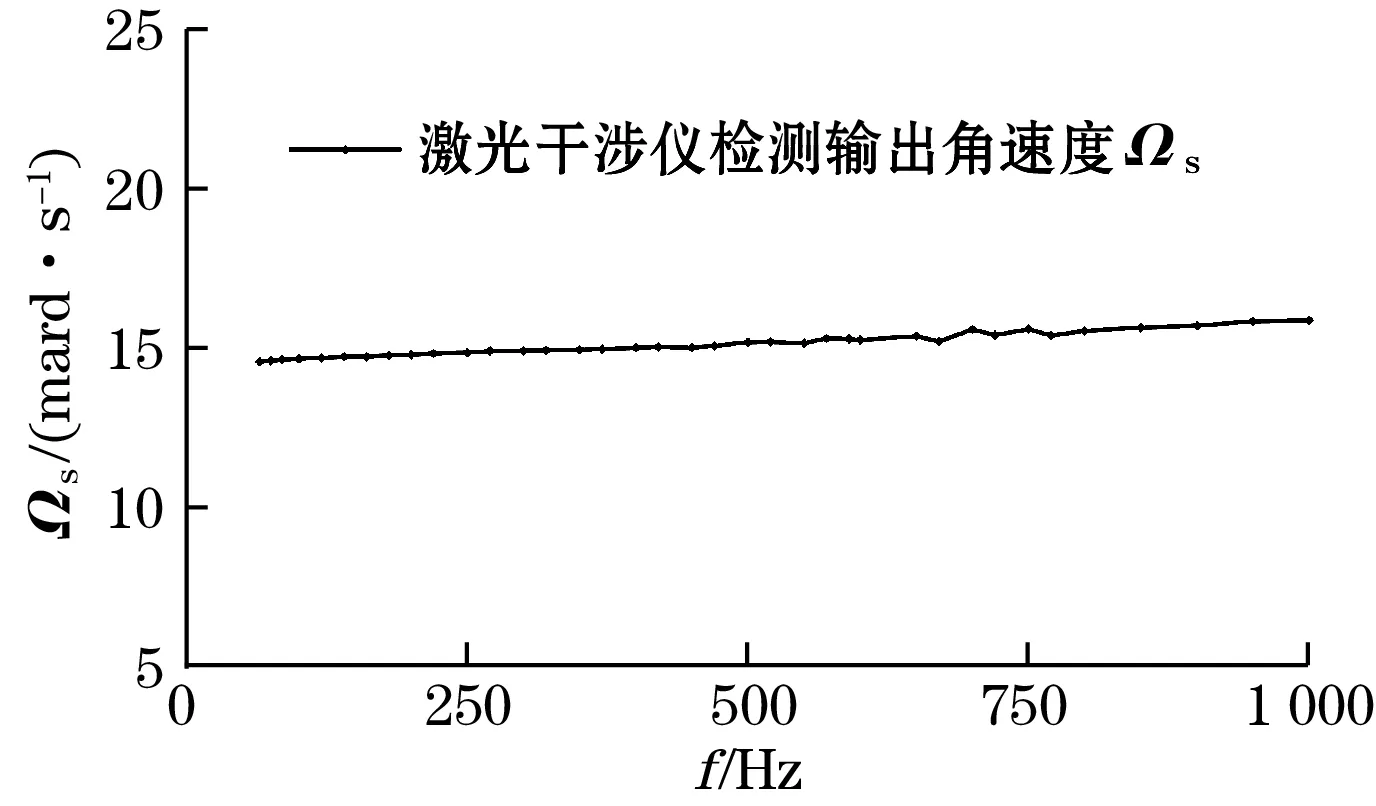
图12 角振动台输出角速度控制结果
设置角振动台提供角速度幅值为0.015 rad/s、频率范围为65 Hz~1 kHz的扫频激励,测试MHD微角振动传感器带宽内的标度因数。MHD微角振动传感器标度因数随频率的变化曲线如图13所示。可见,在测试频带内的MHD输出感应电压幅值约为7.5 mV,标度因数幅值为0.5 V/(rad·s),最大偏离为17.5 mV/(rad·s)。
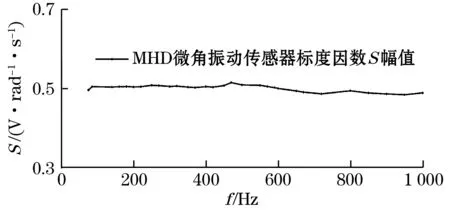
图13 标度因数S幅值随频率变化曲线
对66 Hz及801 Hz时MHD微角振动传感器输出线性度进行测试,分别控制角振动输出0.015、0.1、0.03、0.04、0.06、0.07、0.08、0.09、0.12 rad/s等一系列角速度幅值激励,传感器输出电压φ随输入角速度Ωs的变化曲线如图14所示。可见,传感器输出线性度较好,线性拟合度优于99.8%。801 Hz时,拟合曲线与实际值的最大误差出现在0.06 rad/s,差值为0.246 mV,66 Hz时,最大差值出现在0.015 rad/s时,差值为0.1 mV。
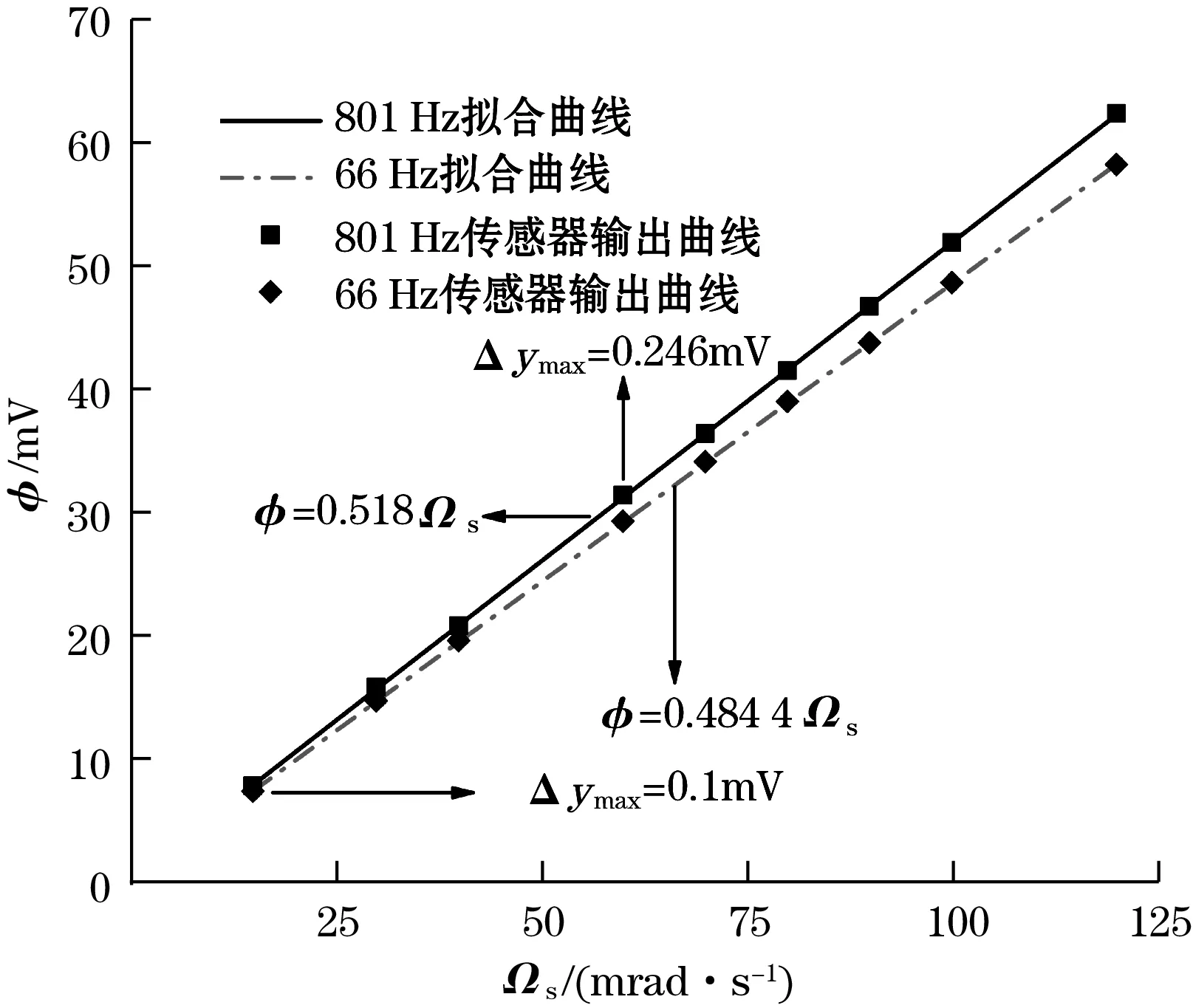
图14 MHD微角振动传感器线性度
5 结束语
由于角振动台输入输出对应关系是离散化的,所以只能点频测试。并且角振动台内置的加速度传感器误差以及USB-6361的输出误差,导致角振动台的此对应关系有微小的差别,角速度幅值控制结果会在设定角速度幅值上下进行小范围的波动,但传感器的标定基准使用激光干涉仪输出角速度,显著提高了标定精度。整个标定系统的误差主要来自激光干涉仪的输出误差,以及USB-6361对传感器输出电压的采集误差。其中,激光干涉仪精度高,自身测量误差较小,环境对角度测量影响较小,所以主要的标定误差来源于安装误差,使得反射镜组与传感器敏感的真实角速度有差别,以及光路对准会产生误差。
为了满足MHD微角振动传感器对宽频带(3 Hz~1 kHz)恒定角速率激励装置的需求,建立了105-AVT角振动台输入模拟电压与输出角速度之间的关系,并将其集成到角振动台控制端,最终能够提供0.004~0.15 rad/s范围内的恒定角速率激励。结合激光干涉仪搭建了适用于MHD微角振动传感器的自动测试标定系统,能够根据测试需求自动对所需频率、幅值下的传感器输出进行采集处理。利用该测试系统对MHD微角振动传感器带宽内的标度因数及线性度进行了实验测试。结果表明,MHD微角振动传感器的测量带宽可达1 kHz,且输出线性度优于99.8%。
